") 城市河道水質(zhì)監(jiān)測無人機(jī)高光譜技術(shù)應(yīng)用研究-萊森光學(xué)
城市河道水質(zhì)監(jiān)測無人機(jī)高光譜技術(shù)應(yīng)用研究-萊森光學(xué)
引言
對(duì)河道水質(zhì)進(jìn)行常態(tài)化監(jiān)測,是河流生態(tài)環(huán)境系統(tǒng)健康維護(hù)的重要基礎(chǔ)性工作。河流水域水質(zhì)的監(jiān)測方法一般有三種,分別是傳統(tǒng)理化監(jiān)測技術(shù)、生物監(jiān)測技術(shù)以及遙感監(jiān)測技術(shù)。傳統(tǒng)理化監(jiān)測技術(shù)方法是采用物理與化學(xué)的檢測儀器對(duì)水質(zhì)樣本進(jìn)行監(jiān)測分析,該方式具有精準(zhǔn)的檢測數(shù)據(jù),可以作為有效的執(zhí)行依據(jù),但是比較消耗人力與時(shí)間,采集樣本的頻次也比較低,采集的數(shù)據(jù)較離散,無法直觀地呈現(xiàn)效果。生物監(jiān)測方式主要是采用生物體對(duì)環(huán)境污染變化所產(chǎn)生的反應(yīng),來表示該環(huán)境現(xiàn)階段被污染的具體情況,具有可以連續(xù)數(shù)據(jù)采集、數(shù)據(jù)的精準(zhǔn)性較高的特點(diǎn),但是該方式前期需要投入的資金較大,成果可能出現(xiàn)局部不連續(xù),也無法直觀呈現(xiàn)。遙感監(jiān)測技術(shù)監(jiān)測河流水域的水質(zhì),主要是利用水質(zhì)中不同物質(zhì)對(duì)光波表現(xiàn)出光譜特性,進(jìn)行遙感光譜技術(shù)波段測試,對(duì)河流水域水質(zhì)參數(shù)分析,然后形成河流水源水質(zhì)參數(shù)反演效果圖,該方法可以有效地呈現(xiàn)出河流水質(zhì)的空間分布情況與對(duì)應(yīng)的變化,及時(shí)發(fā)現(xiàn)河流水源中的污染物,然后進(jìn)行污染物遷移特性分析,具有成本較低、監(jiān)測范圍較廣、監(jiān)測速度較快、監(jiān)測分析結(jié)果直觀可視化等優(yōu)勢,但也存在時(shí)空分辨率較低、抗干擾性較低等缺點(diǎn)。本文從高光譜技術(shù)的基本原理、無人機(jī)載高光譜技術(shù)的優(yōu)勢、基本工作流程,再到現(xiàn)場數(shù)據(jù)采集、內(nèi)業(yè)數(shù)據(jù)處理、 數(shù)據(jù)反演和分析,進(jìn)行機(jī)載高光譜技術(shù)在城市河道水質(zhì)監(jiān)測中的應(yīng)用研究。
2、高光譜技術(shù)基本原理
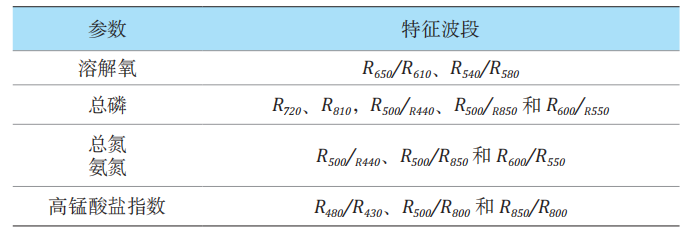
高光譜技術(shù)是采用連續(xù)且較窄的波段光譜對(duì)地面物質(zhì)、水質(zhì)等進(jìn)行遙感成像。無人機(jī)載高光譜環(huán)保技術(shù)主要是無人機(jī)高光譜環(huán)境保護(hù)監(jiān)測技術(shù),采用先進(jìn)的無人機(jī)高光譜遙感技術(shù)對(duì)水流域范圍中的水質(zhì)進(jìn)行及時(shí)性、高效性、精細(xì)化的光譜信息采集。然后搭建該區(qū)域內(nèi)的水質(zhì)反演模型圖,實(shí)現(xiàn)對(duì)整個(gè)監(jiān)測區(qū)域內(nèi)的濃度因子監(jiān)測,快速、可靠、高效地進(jìn)行定性、定量的水質(zhì)指標(biāo)計(jì)算與分析,為精準(zhǔn)明確污染源、水環(huán)境治理提供科學(xué)的判斷數(shù)據(jù)。而單波段反射率與各水質(zhì)參數(shù)之間的相關(guān)性不強(qiáng),為此構(gòu)建波段組合形式,選擇波段比值法,計(jì)算波段比值與各參數(shù)之間的相關(guān)性系數(shù),進(jìn)一步確定各參數(shù)的特征波段,如表 1 所示。
表 1 水質(zhì)參數(shù)對(duì)應(yīng)特征波段
3、無人機(jī)載高光譜技術(shù)
3.1 技術(shù)特點(diǎn)
無人機(jī)高光譜技術(shù)是利用不同物質(zhì)對(duì)不同的波長呈現(xiàn)出不同的特征屬性,然后采用光譜對(duì)這些物質(zhì)特征屬性進(jìn)行判斷,分析出該物質(zhì)的屬性,并結(jié)合先進(jìn)的無人機(jī)載技術(shù)進(jìn)行全流域不間斷的掃描勘查。該技術(shù)具有信息量大的全息光譜功能、不定時(shí)的高頻度巡航功能以及深度學(xué)習(xí)功能等,具有無人機(jī)低空的精細(xì)化與干擾小的特點(diǎn) 。通過采用無人機(jī)機(jī)載高光譜技術(shù)具有如下幾點(diǎn)優(yōu)勢:(1)搭建一套具有清潔生態(tài)小流域全流域、連續(xù)、高效的水質(zhì)監(jiān)測方法體系,可以實(shí)現(xiàn)線上線下同步聯(lián)動(dòng)、 各方參與的生態(tài)清潔小流域長效管理機(jī)制。(2)融合大數(shù)據(jù)技術(shù)、人工智能技術(shù)、GIS 技術(shù)等新興先進(jìn)技術(shù),可以有效地突破傳統(tǒng)水質(zhì)監(jiān)測技術(shù)的局限性,提升監(jiān)測區(qū)域內(nèi)水質(zhì)評(píng)估系統(tǒng)的智能化、數(shù)字化能力。(3)實(shí)時(shí)監(jiān)測水質(zhì)的時(shí)空變化情況、污染物時(shí)空遷移趨勢以及污染源回溯等,精準(zhǔn)把控濃度異常區(qū)域的現(xiàn)場勘查。無人機(jī)高光譜遙感技術(shù)采集示意圖如圖 1 所示。
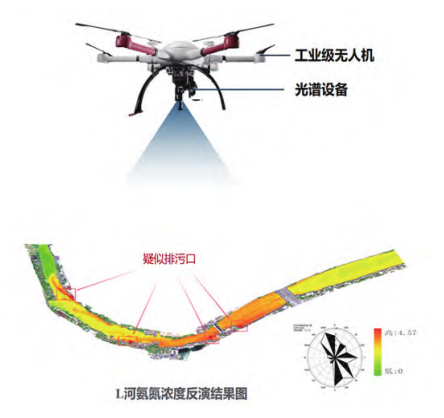
圖1 無人機(jī)高光譜遙感技術(shù)采集示意圖
3.2 工作流程
采用無人機(jī)載高光譜技術(shù)進(jìn)行監(jiān)測的主要流程是:首先對(duì)勘查測區(qū)周邊環(huán)境進(jìn)行信息采集;以此為基礎(chǔ)進(jìn)行無人機(jī)飛行航行的規(guī)劃,執(zhí)行無人機(jī)的數(shù)據(jù)采集,并確保測試區(qū)域的數(shù)據(jù)采集完整性;之后人工進(jìn)行實(shí)地采樣樣本數(shù)據(jù)分析;最后進(jìn)行高光譜分析,結(jié)合該區(qū)域的地面水質(zhì)采樣結(jié)果,搭建水流域的水質(zhì)反演模型效果圖, 通過對(duì)流域水質(zhì)反演分析,精準(zhǔn)掌控水域的污染情況。無人機(jī)載高光譜技術(shù)監(jiān)測流程如圖 2 所示。
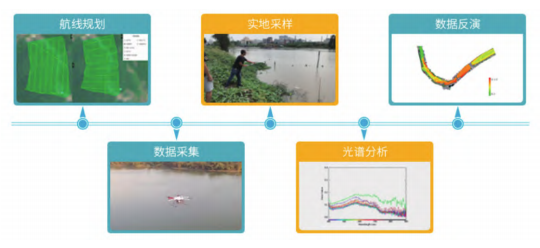
圖 2 無人機(jī)載高光譜技術(shù)監(jiān)測流程圖
3.3 數(shù)據(jù)反演
基于河流的光譜成果圖對(duì)河流拼接好的影像進(jìn)行裁剪,去除河流兩岸并保留水體水質(zhì)部分的數(shù)據(jù),然后進(jìn)行水質(zhì)數(shù)據(jù)的全流程反演處理,輸出反演結(jié)果。數(shù)據(jù)反演的精度分析,是對(duì)各水質(zhì)參數(shù)化驗(yàn)數(shù)據(jù)和反演數(shù)據(jù)進(jìn)行反演準(zhǔn)確率計(jì)算,公式如下:
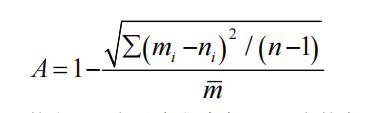
其中:A為反演準(zhǔn)確率;mi為某點(diǎn)化驗(yàn)數(shù)據(jù);ni為某點(diǎn)高光譜反演數(shù)據(jù);

為化驗(yàn)數(shù)據(jù)平均值。
在較為理想的觀測條件下,通過對(duì)大量實(shí)測數(shù)據(jù)進(jìn)行對(duì)比計(jì)算,反演準(zhǔn)確率最大可達(dá)到 85%。
無人機(jī)載高光譜技術(shù)在河道水質(zhì)監(jiān)測中的應(yīng)用
4.1 數(shù)據(jù)采集
根據(jù)物質(zhì)對(duì)波長所展現(xiàn)出的不同特性,就可以利用高光譜技術(shù)分別判定監(jiān)測水質(zhì)中相關(guān)物質(zhì)的屬性。比如從水質(zhì)檢測關(guān)鍵參數(shù)指標(biāo)出發(fā),選擇覆蓋400~1000nm波段范圍的機(jī)載高光譜設(shè)備,可有效監(jiān)測水體中葉綠素a、 總氮、總磷、氨氮、總懸浮物、化學(xué)需氧量、溶解氧等濃度信息,在水質(zhì)光譜分析中,對(duì)550~650nm波長的光進(jìn)行分析賦值,即可反演水中溶解氧和氨氮濃度。具體的數(shù)據(jù)采集過程是同一天的時(shí)間段內(nèi),通過對(duì)某 一區(qū)域內(nèi)六段河道區(qū)域進(jìn)行4架次無人機(jī)載的現(xiàn)場數(shù)據(jù)采集,每段河道的實(shí)際作業(yè)距離在1.2~2.5km 之間。獲取原始數(shù)據(jù)量約為229GB,實(shí)際作業(yè)情況如表 2 所示。
表 2 無人機(jī)載高光譜采集信息統(tǒng)計(jì)
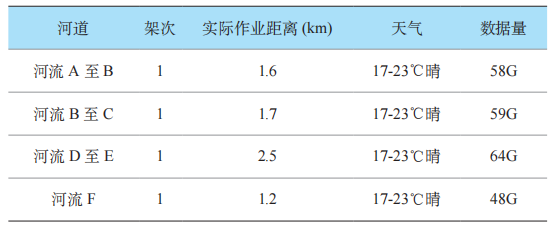
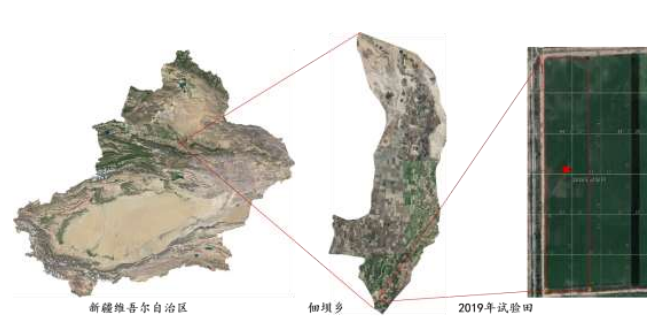
本次數(shù)據(jù)采集現(xiàn)場情況為四段河流,一共完成了32個(gè)采集水質(zhì)樣本點(diǎn),詳細(xì)點(diǎn)位分布圖如圖 3 所示。

圖 3 水質(zhì)樣本采集點(diǎn)分布圖
本次化驗(yàn)結(jié)果主要是針對(duì)溶解氧、高錳酸鹽、氨氮等 指標(biāo)的溶度進(jìn)行實(shí)驗(yàn)室檢測。其中:總磷采用鉬酸銨分光光度發(fā),氨氮采用水楊酸分光光度法,溶解氧采用碘量法,高錳酸鹽指數(shù)采用堿性滴定法。
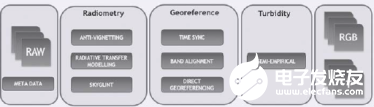
4.2 數(shù)據(jù)處理
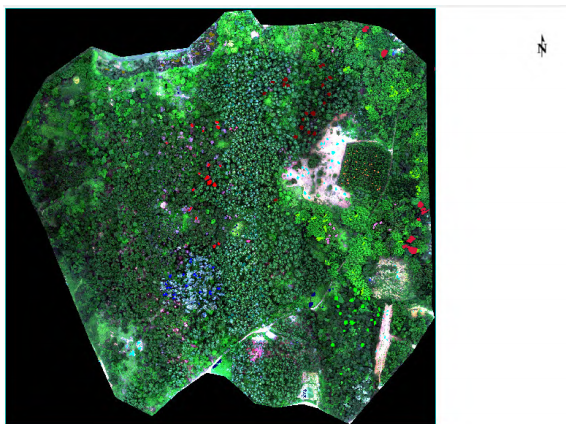
將無人機(jī)載高光譜技術(shù)所采集的數(shù)據(jù)信息進(jìn)行數(shù)據(jù)處理,數(shù)據(jù)的處理方式包括了輻射校正、反射校正、幾 何校正以及波段裁剪等 。主要步驟或環(huán)節(jié)為:(1)輻射校正是采用輻射定標(biāo)文件對(duì)數(shù)據(jù)進(jìn)行校正;(2)反射校正是通過反射布的平均光譜文件對(duì)數(shù)據(jù)進(jìn) 行校正;(3)幾何校正是對(duì)數(shù)據(jù)進(jìn)行地理校正,保證數(shù)據(jù)位置的精度。由于數(shù)據(jù)采集、POS 定位、校正算法等原因,都會(huì)導(dǎo)致單景影像的位置發(fā)生不同程度的變化。因此,需要在一定程度上進(jìn)行影像的幾何校正;(4)波段裁剪對(duì)高光譜數(shù)據(jù)進(jìn)行波段裁剪,保留 400~1000nm波段的數(shù)據(jù)。將多架次數(shù)據(jù)完成影像拼接工作,一般可以采用影像拼接處理,調(diào)整羽化值,并且設(shè)置勻色參數(shù),使拼接后的數(shù)據(jù)無明顯色差。拼接后的高光譜效果(河流A至B 段)如圖 4 所示。
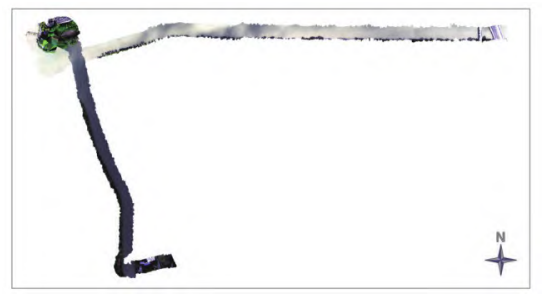
圖4 河道 A 到河道 B 高光譜成果圖
4.3 反演效果
基于河流的光譜成果對(duì)河流水質(zhì)數(shù)據(jù)進(jìn)行全流程反演處理,輸出反演結(jié)果。其中,溶解氧的反演效果如圖 5 所示。

圖 5 河道 A 到 B 的溶解氧(DO)反演效果圖
4.4 對(duì)比分析
無人機(jī)高光譜技術(shù)的實(shí)測應(yīng)用反演結(jié)果,與同步取樣的水質(zhì)分析的對(duì)比,具體結(jié)果如表 3 所示。以溶解氧為例,反演數(shù)據(jù)相對(duì)于化驗(yàn)數(shù)據(jù)有波動(dòng),但整體保持了相近的變化趨勢(圖 6)。經(jīng)計(jì)算,本次實(shí)測數(shù)據(jù)溶解氧反演準(zhǔn)確率為 80.7%。
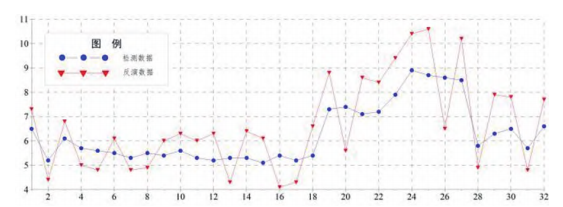
圖6 溶解氧化驗(yàn)和反演曲線
4.5 污染判定
通過對(duì)高光譜反演異常點(diǎn)的分析,可以判定疑似污染點(diǎn)。高光譜反演進(jìn)行疑似污染點(diǎn)的判讀與劃定,是根據(jù)采集水樣的監(jiān)測結(jié)果,將超標(biāo)因子高錳酸鹽、氨氮、溶解氧及總磷作為本次反演結(jié)果中關(guān)注的污染物。基于高光譜反演效果圖中污染物總磷、氨氮、溶解氧 及高錳酸鹽的濃度的變化趨勢(由綠變紅 / 黃片區(qū)),劃定原則為將紅色 / 黃色突出位置標(biāo)定為疑似污染點(diǎn)位,最終標(biāo)定9個(gè)疑似污染點(diǎn)位,成果整體分布情況如圖 7 所示,其中河流 B 其中一處水質(zhì)異常點(diǎn)如圖 8 所示。
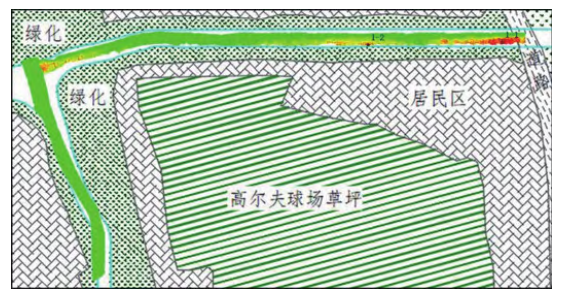
圖7 河道 A 至河道 B 疑似污染點(diǎn)分布圖
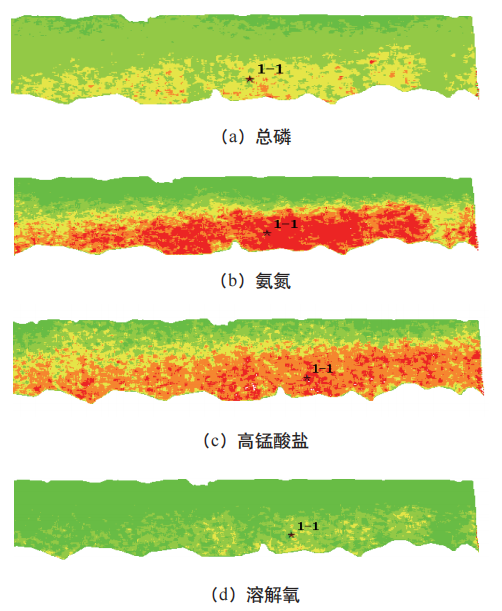
圖8 疑似污染點(diǎn)高光譜反演結(jié)果圖
通過河流疑似污染點(diǎn)位分析,1-1 號(hào)疑似污染點(diǎn)位于河流B西側(cè),南面為住宅區(qū),推測可能為雨水或者污水排放導(dǎo)致該處水質(zhì)數(shù)值異常。疑似點(diǎn)位的高光譜反演結(jié) 果如表 4 與圖 8。結(jié)合疑似污染點(diǎn)大部分位于居民住宅區(qū)附近的情況,推測生活污水以及雨水的排放是導(dǎo)致水質(zhì)異常的主要原因。
表 4 疑似污染點(diǎn)高光譜反演結(jié)果

根據(jù)《地表水環(huán)境質(zhì)量標(biāo)準(zhǔn)》(GB 3838-2002),疑 似污染點(diǎn)高錳酸鹽指數(shù)為5.9,屬于 III 類水標(biāo)準(zhǔn)(≤ 6), 其余三個(gè)因子為 IV 類水標(biāo)準(zhǔn),提示該處有污染可能,應(yīng)予及時(shí)處治。
5、結(jié)論
本文通過基于高光譜技術(shù),采用無人機(jī)載的方式,應(yīng)用于城市河道水質(zhì)監(jiān)測,得出了如下基本結(jié)論:(1)無人機(jī)載高光譜技術(shù)對(duì)河道水質(zhì)監(jiān)測具有可行性。(2)通過與同步采集水樣化驗(yàn)數(shù)據(jù)對(duì)比,該技術(shù)有效,且具有一定的可靠性。(3)該技術(shù)對(duì)污染異常點(diǎn)的發(fā)現(xiàn),具有優(yōu)勢。(4)重復(fù)掃描可提高反演精度,再次采樣分析也有助 于數(shù)據(jù)判讀的可靠性。
推薦:
便攜式地物光譜儀iSpecField-NIR/WNIR
專門用于野外遙感測量、土壤環(huán)境、礦物地質(zhì)勘探等領(lǐng)域的最新明星產(chǎn)品,由于其操作靈活、便攜方便、光譜測試速度快、光譜數(shù)據(jù)準(zhǔn)確是一款真正意義上便攜式地物光譜儀。

無人機(jī)機(jī)載高光譜成像系統(tǒng)iSpecHyper-VM100
一款基于小型多旋翼無人機(jī)機(jī)載高光譜成像系統(tǒng),該系統(tǒng)由高光譜成像相機(jī)、穩(wěn)定云臺(tái)、機(jī)載控制與數(shù)據(jù)采集模塊、機(jī)載供電模塊等部分組成。無人機(jī)機(jī)載高光譜成像系統(tǒng)通過獨(dú)特的內(nèi)置式或外部掃描和穩(wěn)定控制,有效地解決了在微型無人機(jī)搭載推掃式高光譜照相機(jī)時(shí),由于振動(dòng)引起的圖像質(zhì)量較差的問題,并具備較高的光譜分辨率和良好的成像性能。

便攜式高光譜成像系統(tǒng)iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫(yī)學(xué)醫(yī)療、精準(zhǔn)農(nóng)業(yè)、礦物地質(zhì)勘探等領(lǐng)域的最新產(chǎn)品,主要優(yōu)勢具有體積小、幀率高、高光譜分辨率高、高像質(zhì)等性價(jià)比特點(diǎn)采用了透射光柵內(nèi)推掃原理高光譜成像,系統(tǒng)集成高性能數(shù)據(jù)采集與分析處理系統(tǒng),高速USB3.0接口傳輸,全靶面高成像質(zhì)量光學(xué)設(shè)計(jì),物鏡接口為標(biāo)準(zhǔn)C-Mount,可根據(jù)用戶需求更換物鏡。

審核編輯黃宇
-
光譜儀
+關(guān)注
關(guān)注
2文章
964瀏覽量
30787 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10437瀏覽量
180480 -
高光譜
+關(guān)注
關(guān)注
0文章
331瀏覽量
9943
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
無人機(jī)全景監(jiān)測:空域管理的新革命

萊森光學(xué)-無人機(jī)高光譜在安徽農(nóng)業(yè)大學(xué)的演示#高光譜 #無人機(jī) #無人機(jī)高光譜 #測繪

無人機(jī)遙感技術(shù)
無人機(jī)遙感技術(shù)
河道水質(zhì)監(jiān)測站——恒星物聯(lián)綜合水質(zhì)監(jiān)測站
恒星物聯(lián) 微型水質(zhì)監(jiān)測站 水質(zhì)監(jiān)測站
漂浮型水質(zhì)監(jiān)測站——河道水質(zhì)監(jiān)測
利用八軸無人機(jī)搭載光譜儀進(jìn)行水質(zhì)監(jiān)測
無人機(jī)水質(zhì)遙感監(jiān)測方法
萊森光學(xué)成功試飛多旋翼無人機(jī)高光譜成像系統(tǒng)

深圳大學(xué)洋涌河水體光譜數(shù)據(jù)采集服務(wù)圓滿完成-萊森光學(xué)

基于多源光譜信息的棉花水、氮監(jiān)測模型研究-萊森光學(xué)
基于無人機(jī)高光譜遙感的森林可燃物分類方法研究-萊森光學(xué)
[萊森光學(xué)]使用無人機(jī)高光譜成像系統(tǒng)進(jìn)行地表監(jiān)測
![[<b class='flag-5'>萊</b><b class='flag-5'>森</b><b class='flag-5'>光學(xué)</b>]使用<b class='flag-5'>無人機(jī)</b><b class='flag-5'>高</b><b class='flag-5'>光譜</b>成像系統(tǒng)進(jìn)行地表<b class='flag-5'>監(jiān)測</b>](https://file1.elecfans.com//web2/M00/BD/DC/wKgaomWnauWAWwIWAAIKWf6e6I8527.png)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論