 永磁同步電機FOC控制的基本原理及Matlab/Simulink仿真分析
永磁同步電機FOC控制的基本原理及Matlab/Simulink仿真分析
前言
做永磁同步電機控制繞不開FOC,本章節主要介紹FOC控制的基本原理、坐標變換以及永磁同步電機在同步旋轉坐標系下的數學模型,并通過Matlab/Simulink進行永磁同步電機FOC控制算法的仿真分析。
一、FOC的基本原理
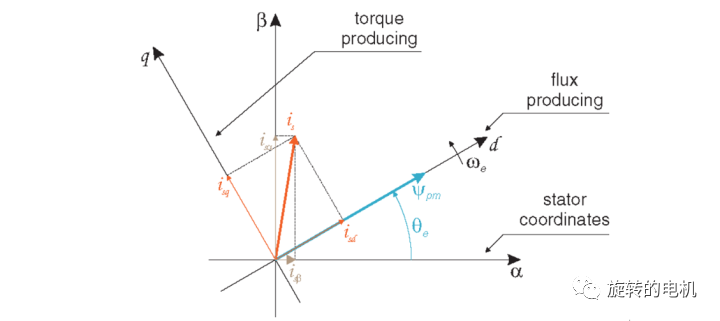
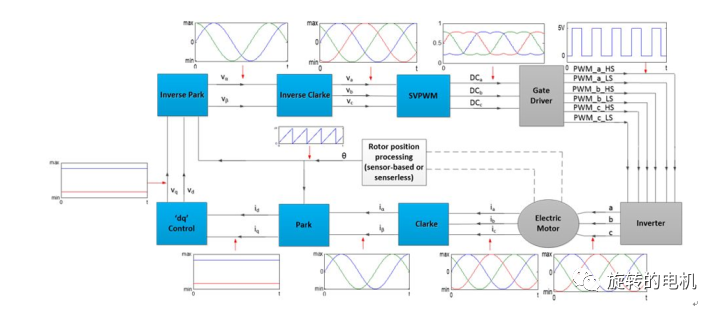
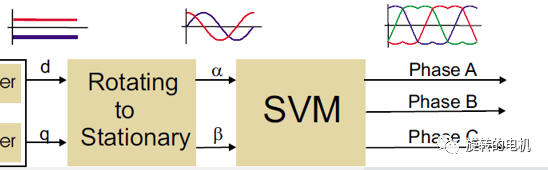
磁場定向控制(Field-Oriented Control,FOC)系統的基本思想是:通過坐標變換,在按轉子磁場定向同步旋轉坐標系中,得到等效的直流電動機模型,仿照直流電動機的控制方法控制電磁轉矩與磁鏈,然后將轉子磁鏈定向坐標系中的控制量反變換得到三相坐標系的對應量,以實施控制,具體流程如下圖所示:
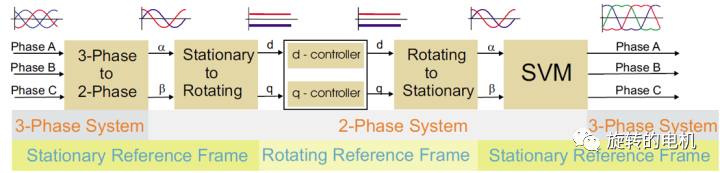
FOC最重要的原則是:按轉子磁場定向,即保持轉子磁鏈旋轉矢量始終與dq坐標系下的d軸重合,q軸正交。 通過按轉子磁場定向,將定子電流解耦為了勵磁分量 id和轉矩分量 iq。 通過電流 id實現對轉子磁鏈的控制,電流 iq實現對電磁轉矩的控制,類比于直流電機的控制。 對于表貼式永磁同步電機SPM,一般設置勵磁分量id =0,定子電流全部用于產生電磁轉矩。
FOC最主要的任務就是:通過不停的觀測轉子角度,實現轉子磁鏈定向,即保持轉子磁鏈旋轉矢量始終與dq坐標系下的d軸重合,q軸正交,dq坐標軸同轉子磁鏈同步旋轉。
二、坐標變換
2.1.Clark坐標變換
靜止坐標變換Clark變換:
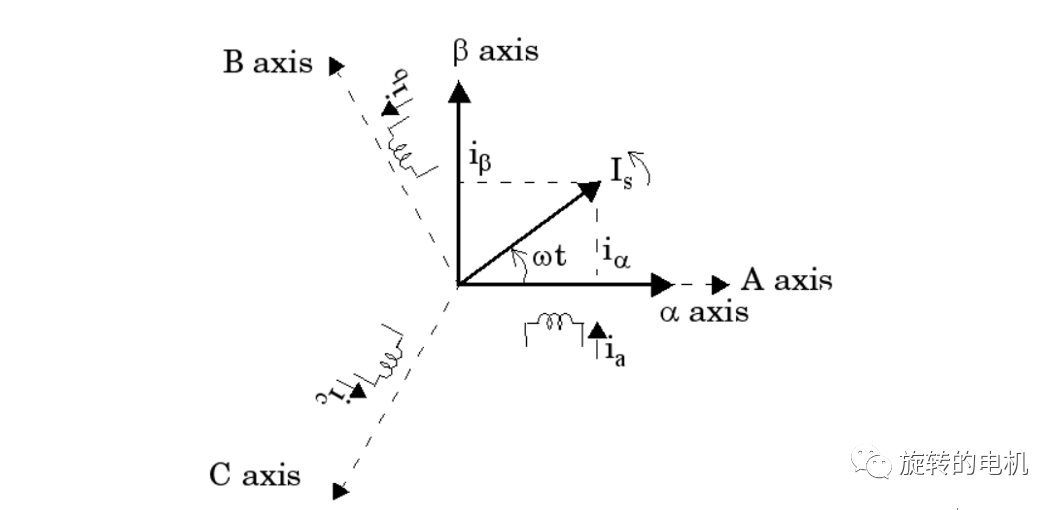
采用等幅值變換,通過下式將三相靜止坐標系ABC下的電流轉換為兩相靜止坐標系αβ下的電流:
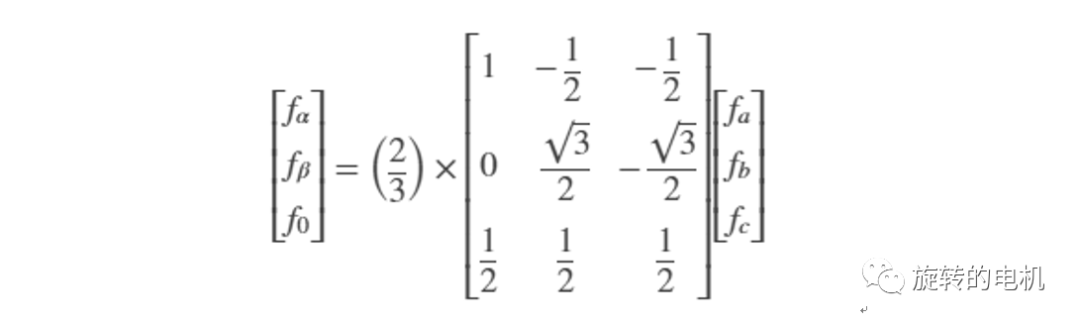
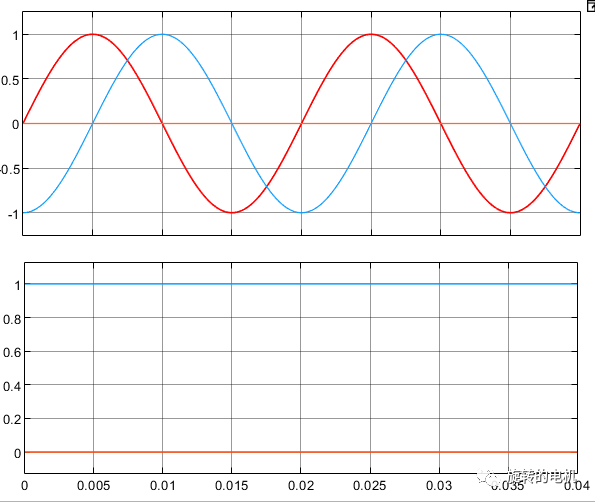
變換結果:
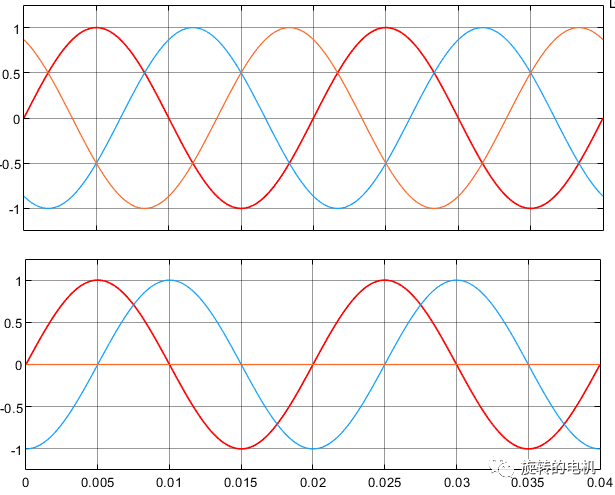
由于ia+ib+ic=0 ,因此實際中只需要三相靜止坐標系下的兩相電流即可,通過下式進行變換:

2.2.Park坐標變換
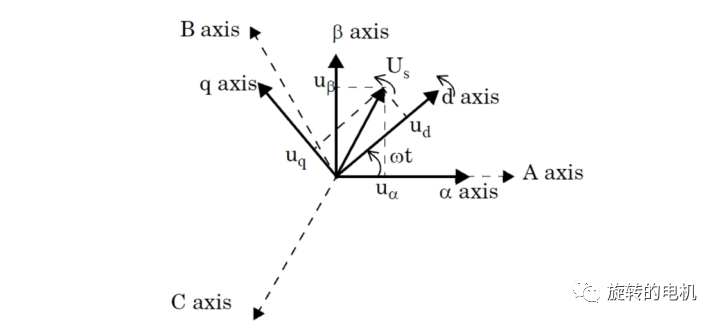
將兩相靜止坐標系αβ下的電流轉換為同步旋轉坐標系dq下的電流,由下式所示:

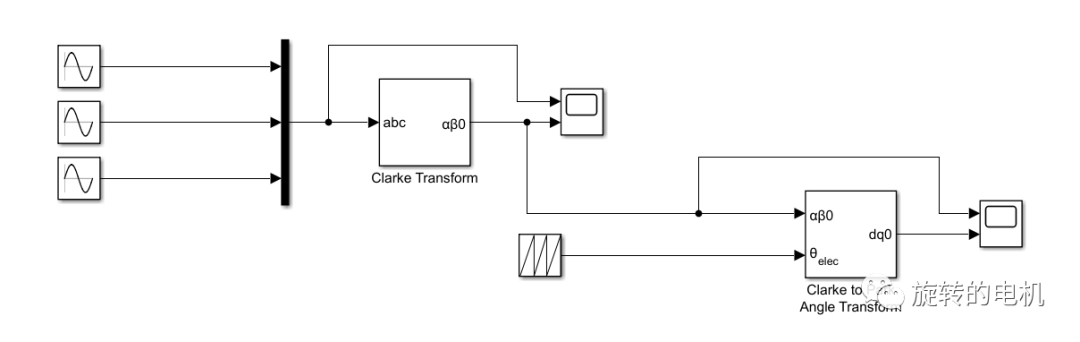
變換結果:
三、永磁同步電機在同步旋轉坐標系下的數學模型
將三相自然坐標系下的PMSM數學模型,通過坐標變換,轉換為同步旋轉坐標系下的數學模型。 同步旋轉坐標系的d軸與轉子磁鏈對齊,并保持同步旋轉,如下所示:
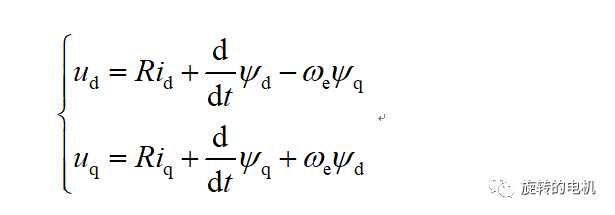
定子電壓方程:
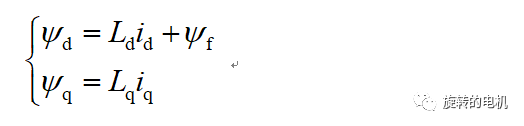
定子磁鏈方程:
電磁轉矩方程:

運動方程:

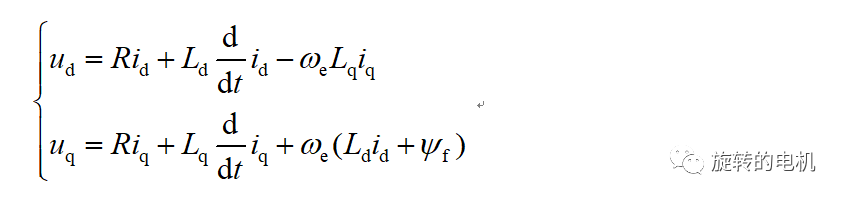
將定子磁鏈方程帶入電壓方程可得定子電壓方程為:
此時電磁轉矩方程可寫為:

由上式,通過坐標變換將三相自然坐標系下的PMSM數學模型變換為同步旋轉坐標系下的數學模型,使PMSM的數學模型實現了解耦,可仿照直流電機的控制方法對PMSM進行控制。
FOC的整體控制框架如下圖所示:
四、永磁同步電機磁場定向控制Matlab/Simulink仿真分析
4.1.電壓開環控制
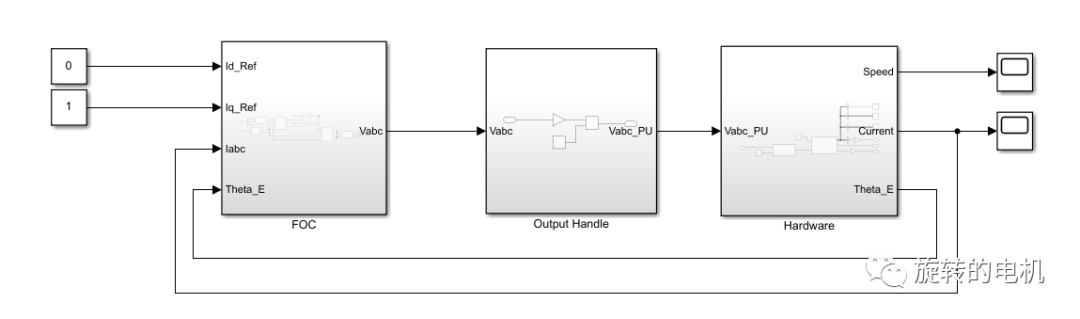
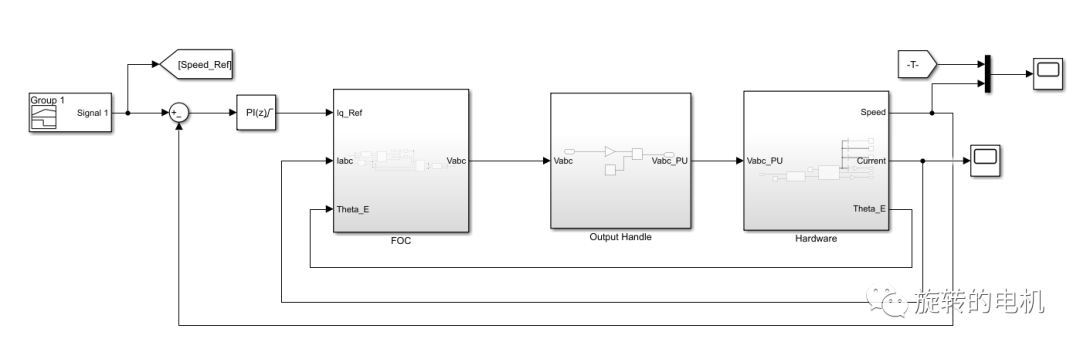
如上圖所示,直接給定同步旋轉坐標系下的Vd,Vq電壓實現永磁同步電機磁場定向的電壓開環控制。 Matlab/Simulink整體仿真框圖如下所示:
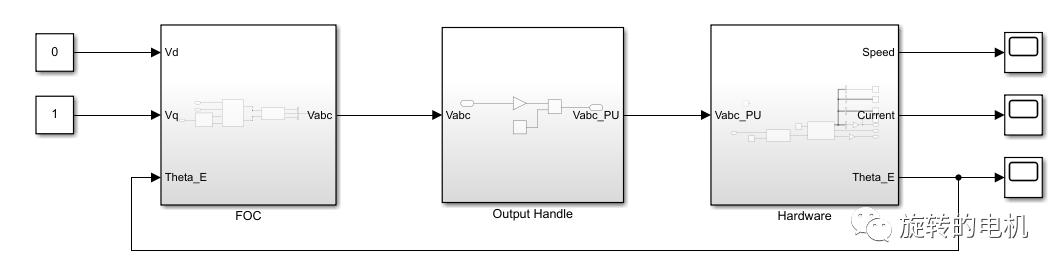
4.1.1.仿真電路分析
直接給定同步旋轉坐標系下Vd,Vq的電壓值實現永磁同步電機磁場定向的電壓開環控制。
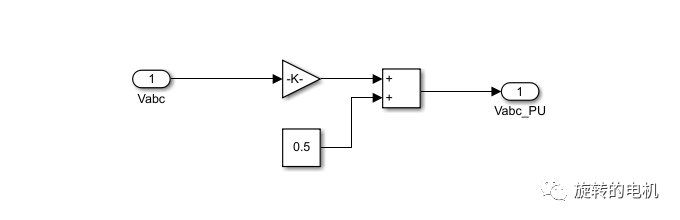
此處作了一個歸一化處理,將FOC電壓開環控制的輸出電壓(調制波形 馬鞍波)范圍設置在[0,1]之間。
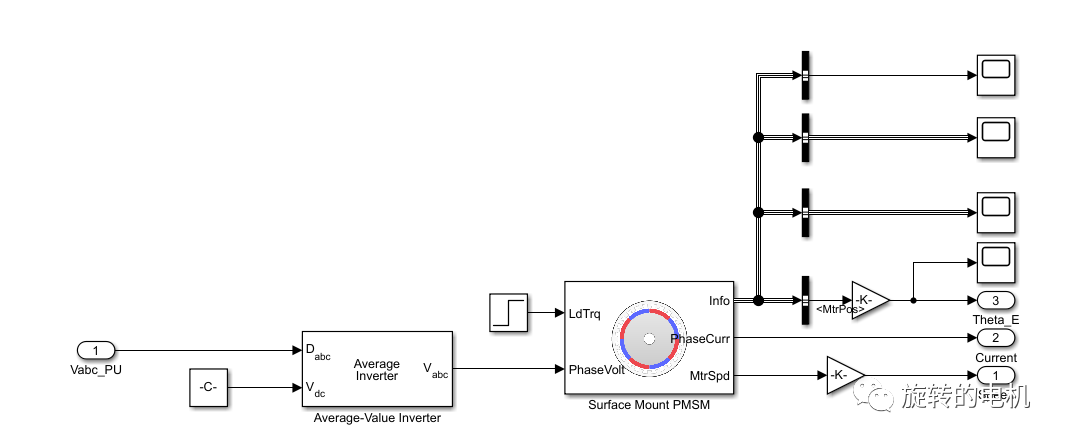
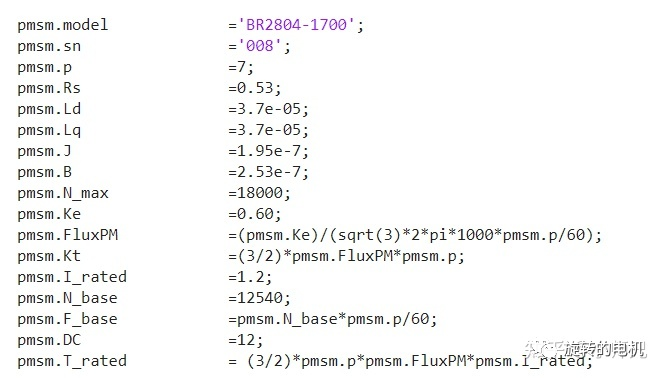
主電路包括逆變電路與永磁同步電機,逆變電路如下圖所示,采用Average-Value Inverter模塊直接生成三相正弦電壓。 永磁同步電機采用BR2804-1700電機(電機的參數用ST Motor Proflier測得),參數如下:

4.1.2.仿真結果分析
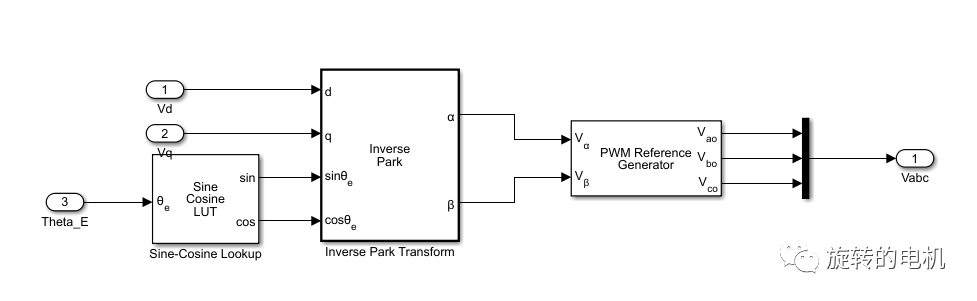
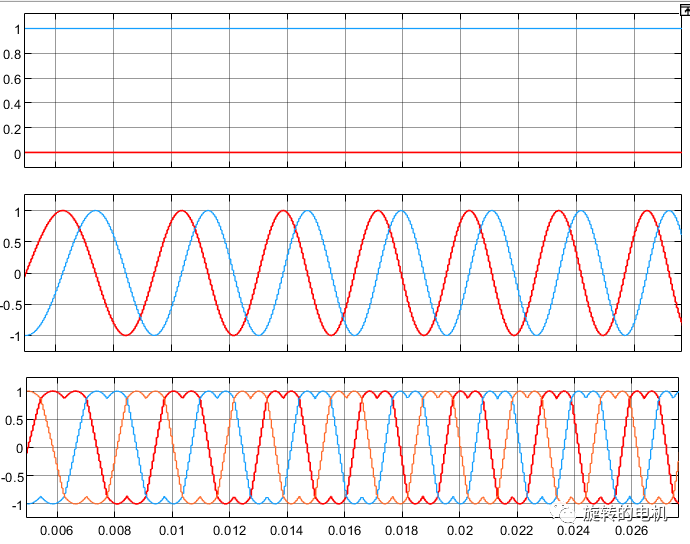
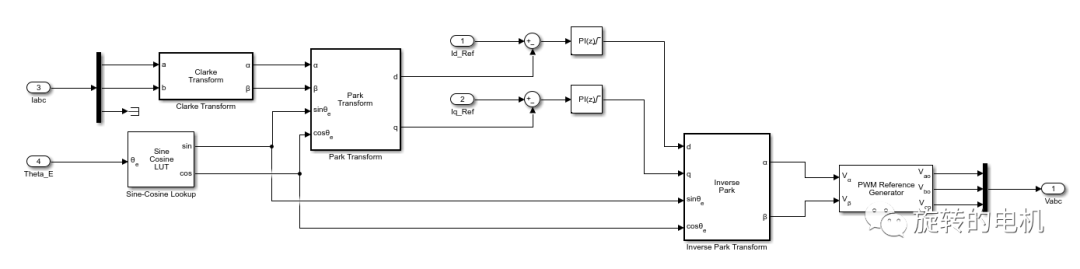
設置開環輸入電壓Vd、Vq為0和1,該電壓經過反Park變換及SVPWM算法輸出的馬鞍波形如下:
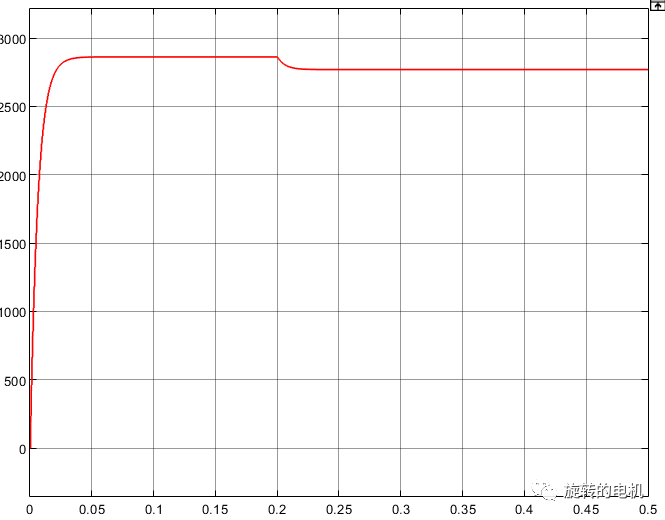
電機轉速:0.2s突加負載
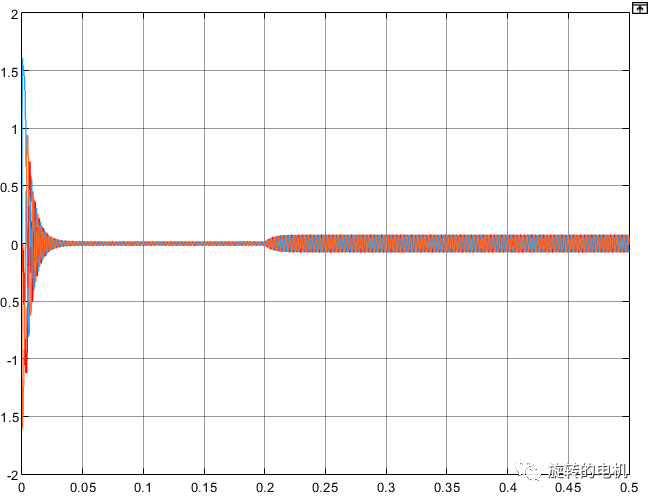
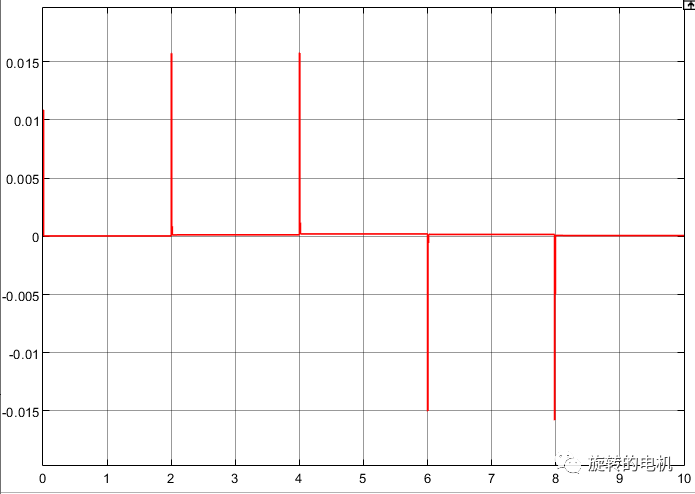
電機定子電流:
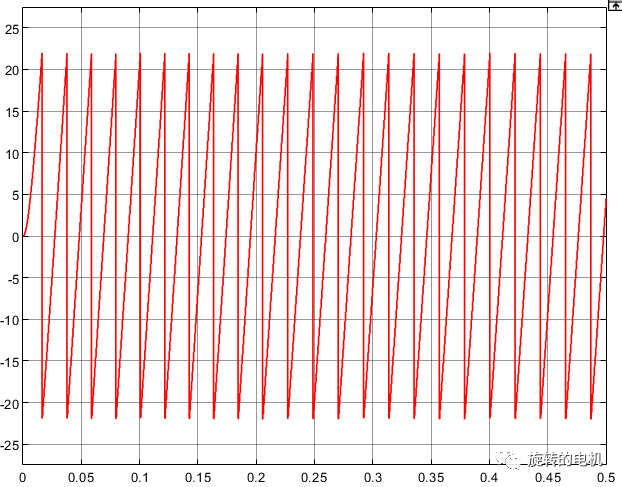
電機轉子位置:
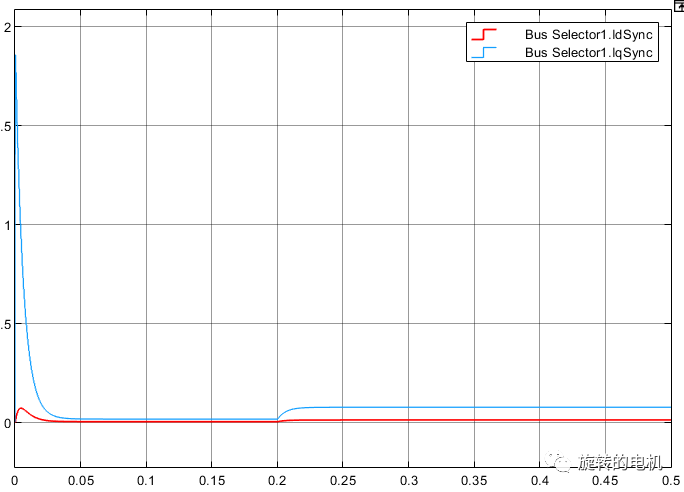
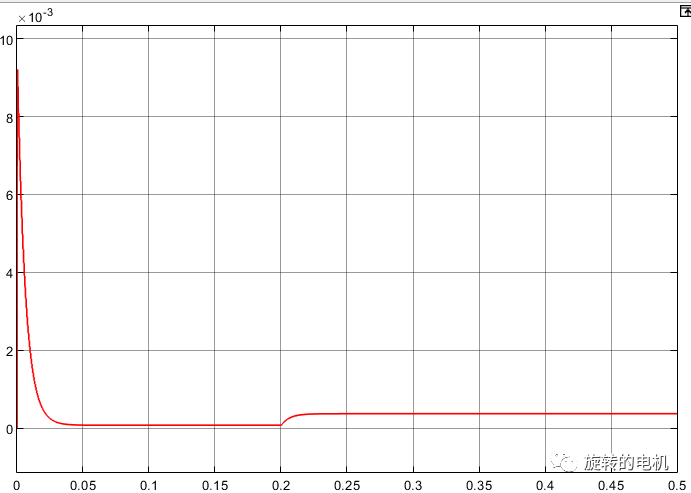
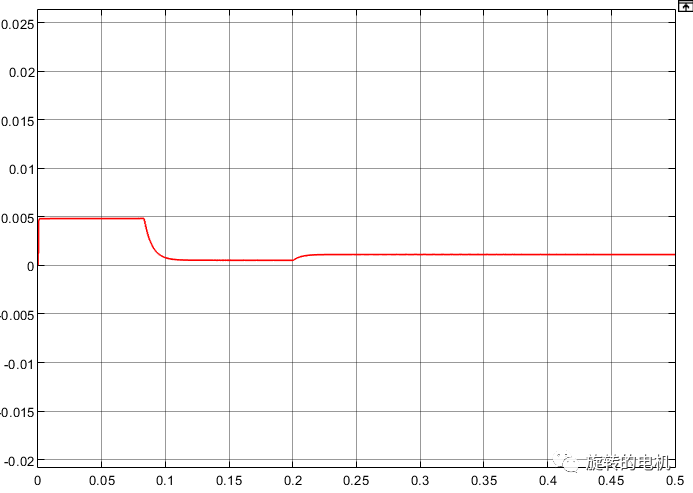
dq坐標系下的定子電流值:
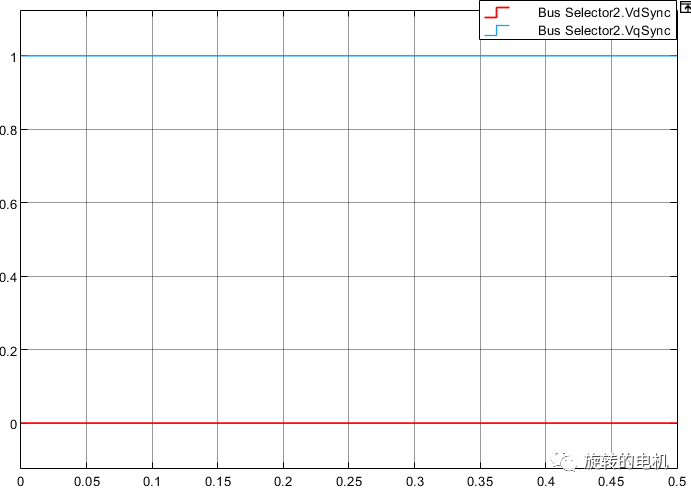
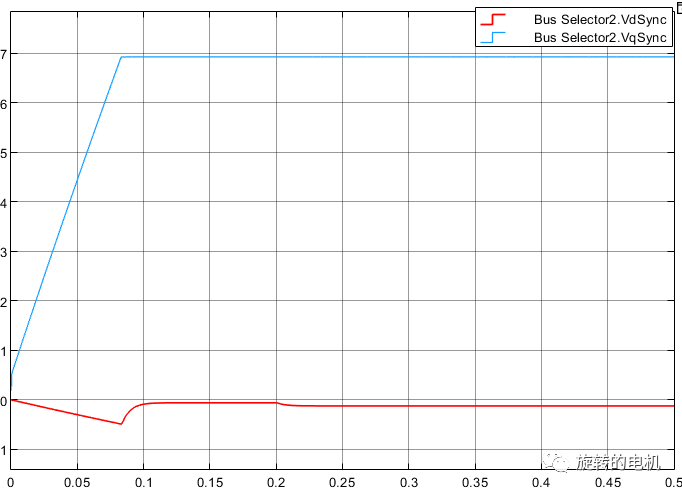
dq坐標系下的定子電壓:
電磁轉矩:
4.2.電流閉環控制

在電壓開環控制中,加入負載后dq坐標系下的定子電流Id不等于0約為0.036,說明定子電流未完全用于產生電磁轉矩。 引入電流閉環控制,精確的控制電機Id、Iq電流值。 電流環的主要作用是在電機啟動過程中能夠以最大的電流啟動,同時對電網電壓的波動起及時抗擾的作用,加快動態系統的響應速度,提高系統的穩定性,其控制框圖如上圖所示。
永磁同步電機電流閉環控制的Matlab/Simulink整體仿真框圖如下所示:
4.2.1.仿真電路分析
與電壓開環控制的不同點就是將定子電流進行了反饋,設定同步旋轉坐標下定子電流為Id_Ref、Iq_Ref,設定值與定子電流的反饋值Id、Iq進行PI控制,PI控制器的輸出作為永磁同步電機的電壓給定,驅動PMSM。
其余仿真部分同電壓開環控制。
4.2.2.仿真結果分析
設置電流參考值Id_Ref、Iq_Ref為0和1,電流參考值與Id和Iq電流反饋值的誤差經PI調節器輸出電壓Vd、Vq用于電機控制。
電機轉速:0.2s突加負載
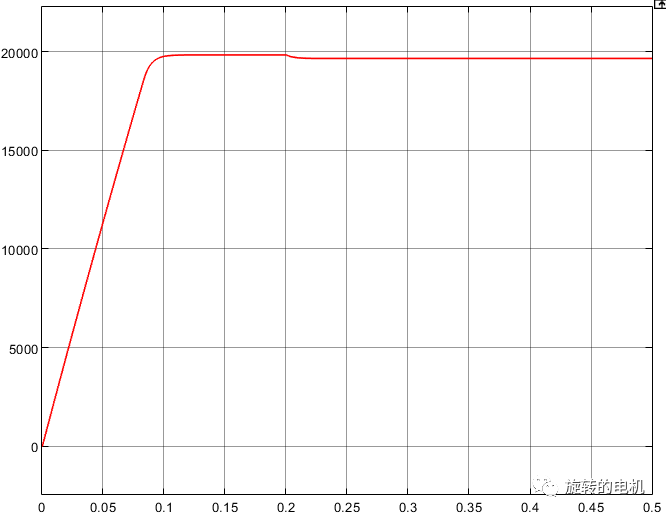
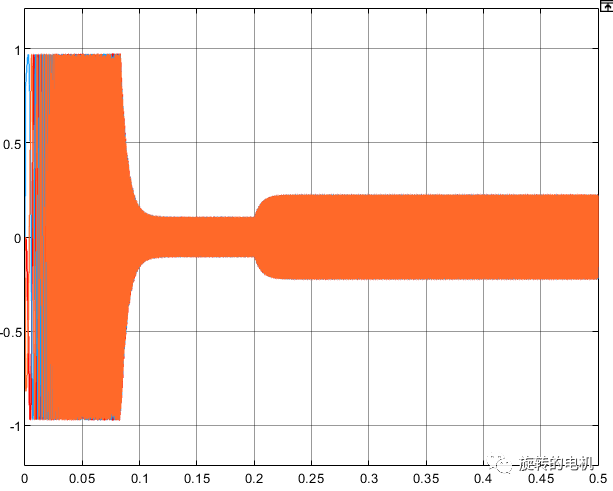
電機定子電流:
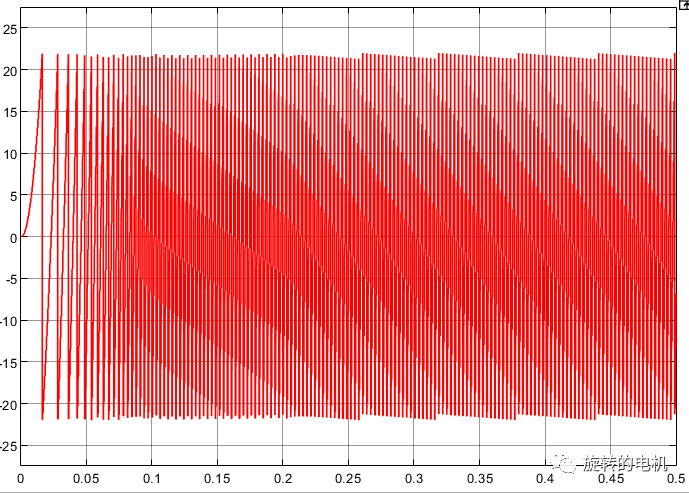
電機轉子位置:
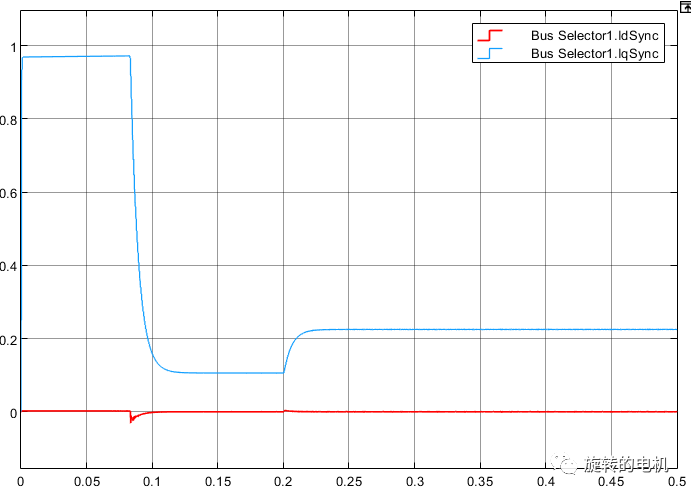
dq坐標系下的定子電流值:電機啟動時以設定的最大電流1A進行啟動,當轉速達到穩態值時電流立即降了下來,實現了理想最優的啟動過渡過程。
dq坐標系下的定子電壓:
電磁轉矩:
4.3.轉速外環電流內環雙閉環控制
在實際控制中我們一般關心轉速的變化,期望電機以設定的轉速進行變化,這時僅靠電流閉環不太能實現,加入轉速閉環,實現對轉速的控制。 轉速控制器的輸出為電流控制器的給定,轉速控制器的輸出要進行限幅,因為轉速控制器的輸出限幅值決定了所用電機的最大允許電流。
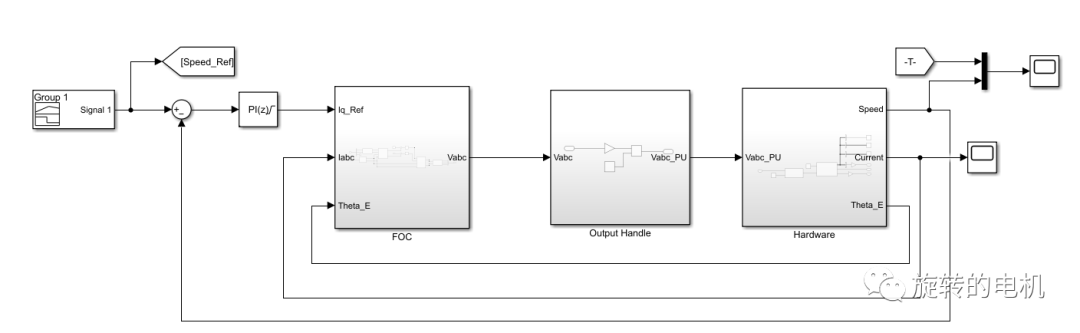
永磁同步電機轉速外環電流內環雙閉環控制的Matlab/Simulink整體仿真框圖如下所示:
4.3.1.仿真電路分析
在電流閉環控制的基礎上引入了轉速閉環控制,轉速控制器的輸出作Iq電流的輸入,構成轉速外環電流內環雙閉環控制系統。
4.3.2.仿真結果分析
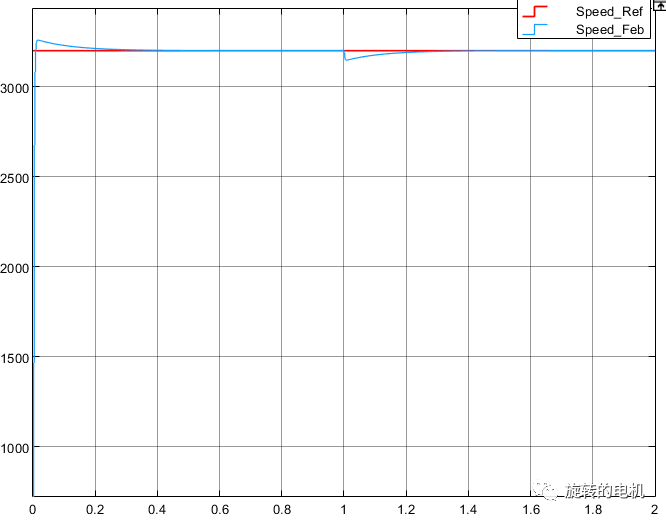
4.3.2.1設定目標轉速為3200r/min
電機轉速:1s突加負載
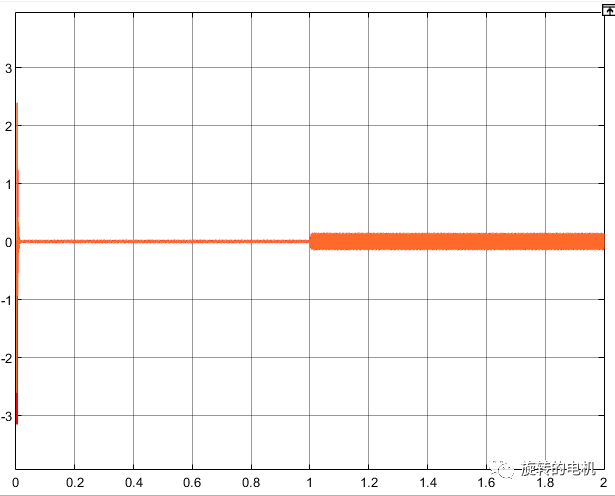
電機定子電流:
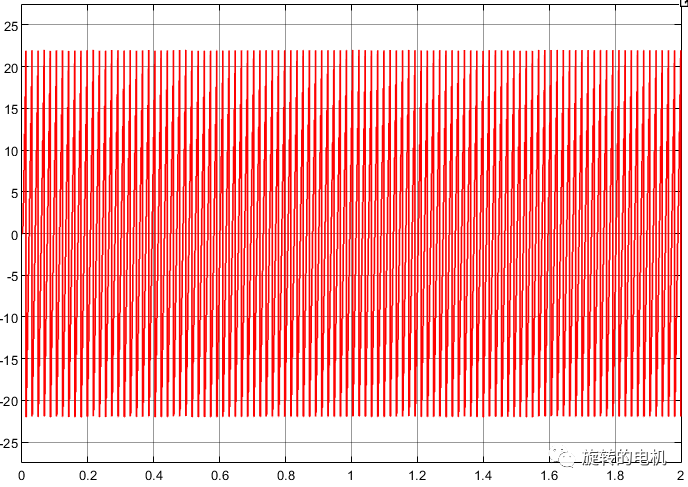
電機轉子位置:
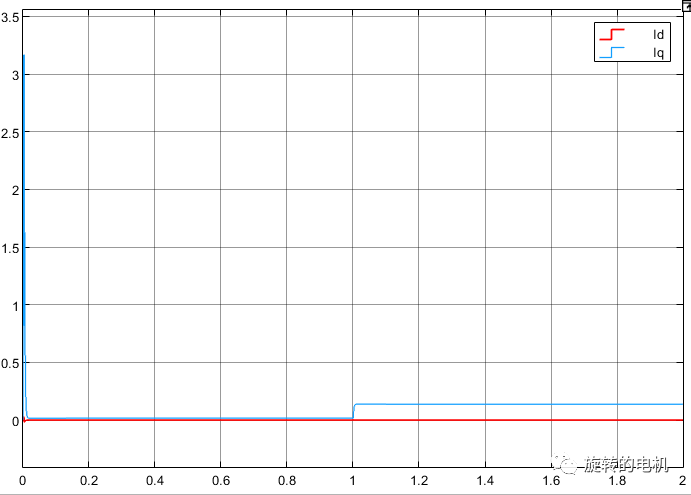
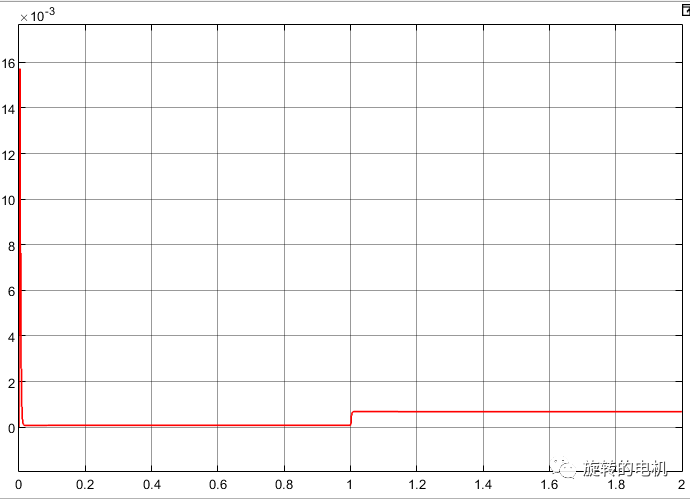
dq坐標系下的定子電流值:
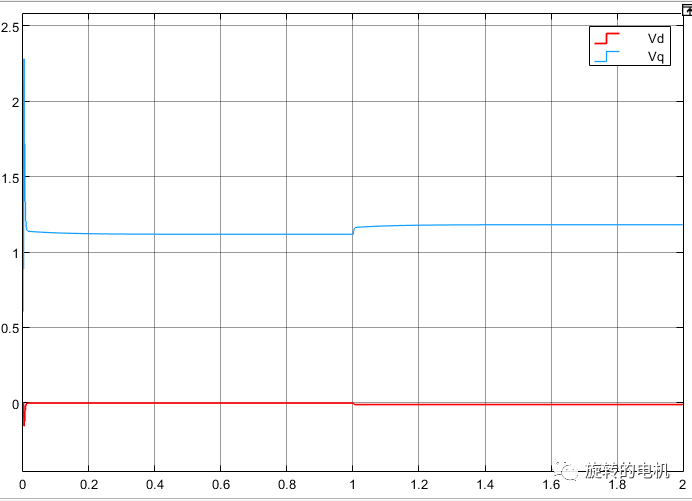
dq坐標系下的定子電壓:
電磁轉矩:
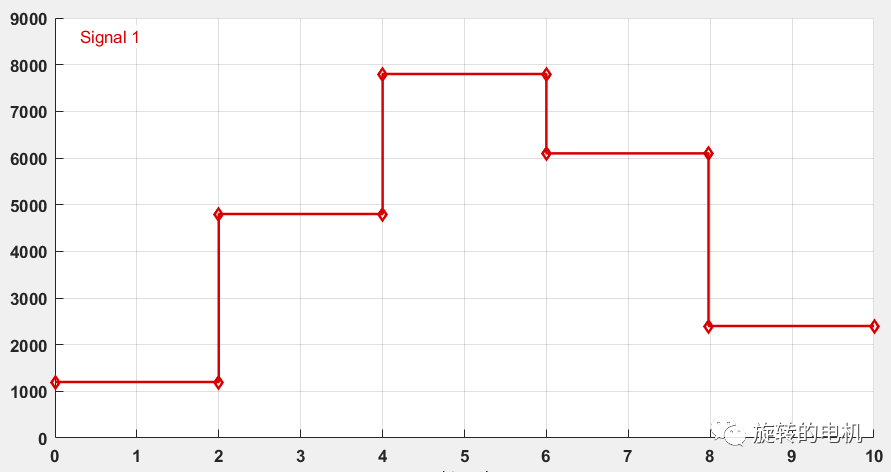
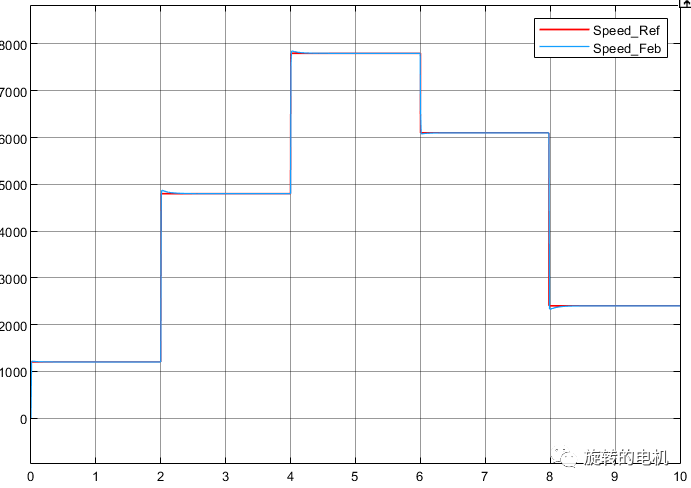
4.3.2.1設定目標轉速為變化的值
目標轉速:
電機轉速:
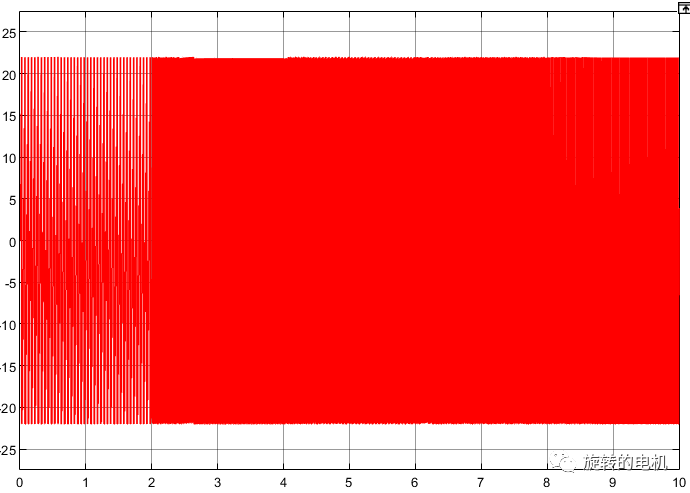
電機定子電流:
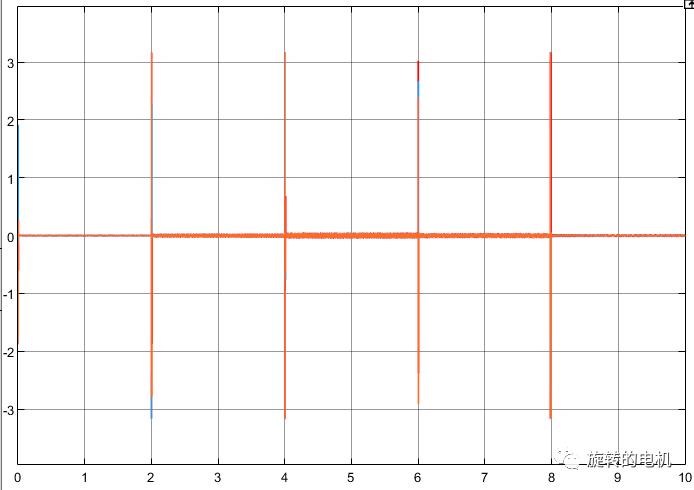
電機轉子位置:
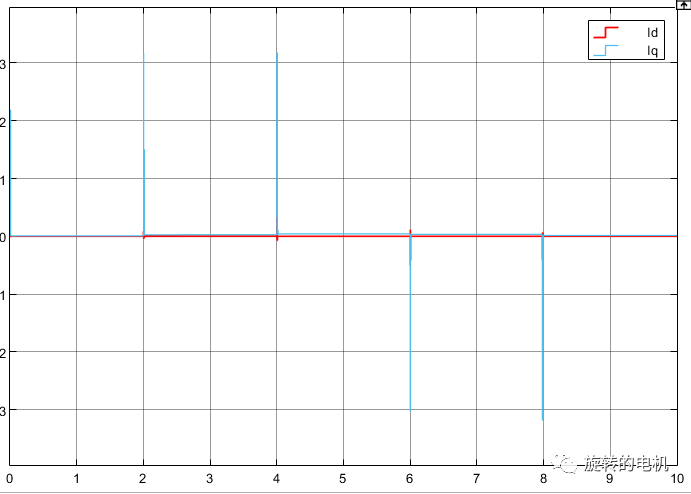
dq坐標系下的定子電流值:
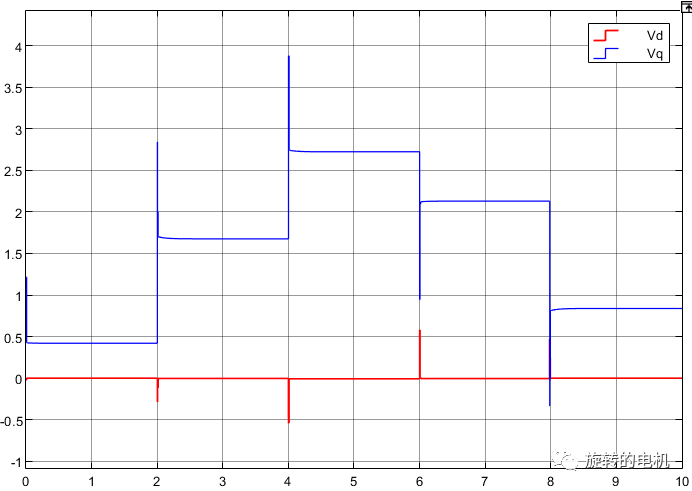
dq坐標系下的定子電壓:
電磁轉矩:
五、小結
至此永磁同步電機FOC的基本原理及Matlab/Simulink的仿真部分就說完了。 永磁同步電機的電壓開環控制、電流閉環控制、轉速外環電流內環雙閉環控制與直流電機的控制思想一致,永磁同步電機通過坐標變換,轉換到按轉子磁場定向的同步旋轉坐標系中,就是為了實現PMSM數學模型的解耦,將PMSM等效為一個他勵“直流電機”,按直流電機的控制思想進行PMSM的控制。 有關PID控制器的參數整定、SVPWM控制算法以及永磁同步電機磁場定向矢量控制的工程實現會在后續進行補充。
總結
本章節介紹了FOC控制的基本原理,坐標變換以及永磁同步電機在同步旋轉坐標系下的數學模型,并通過Matlab/Simulink進行了永磁同步電機FOC控制算法的仿真分析,包括電壓開環控制、電流閉環控制、轉速外環電流內環雙閉環控制,為后續章節的分析奠定基礎。
-
matlab
+關注
關注
185文章
2976瀏覽量
230474 -
永磁同步電機
+關注
關注
28文章
873瀏覽量
49552 -
Simulink
+關注
關注
22文章
535瀏覽量
62400 -
仿真分析
+關注
關注
3文章
105瀏覽量
33659 -
FOC控制
+關注
關注
0文章
43瀏覽量
2792
發布評論請先 登錄
相關推薦
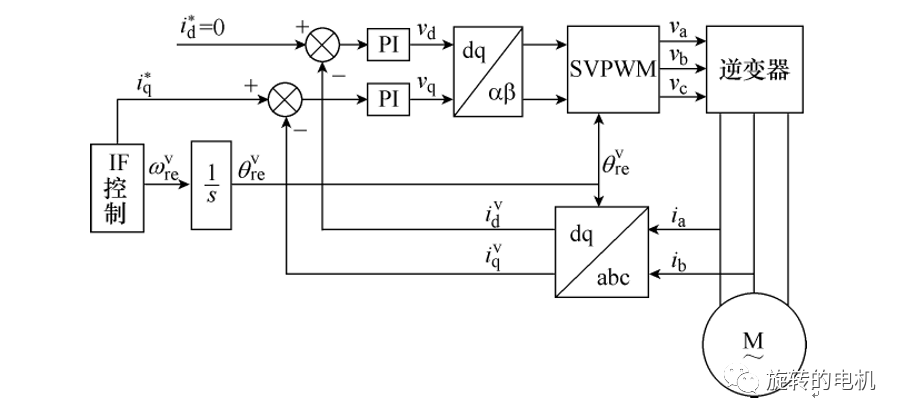
在Matlab/Simulink中進行永磁同步電機流頻比I/F控制系統的仿真分析
【下載】《現代永磁同步電機控制原理及MATLAB仿真》——同步電機MATLAB仿真與技術分析
基于Matlab/Simulink的永磁同步電機(PMSM)
永磁同步電機(PMSM)磁場定向控制(FOC)電流環PI調節器參數整定

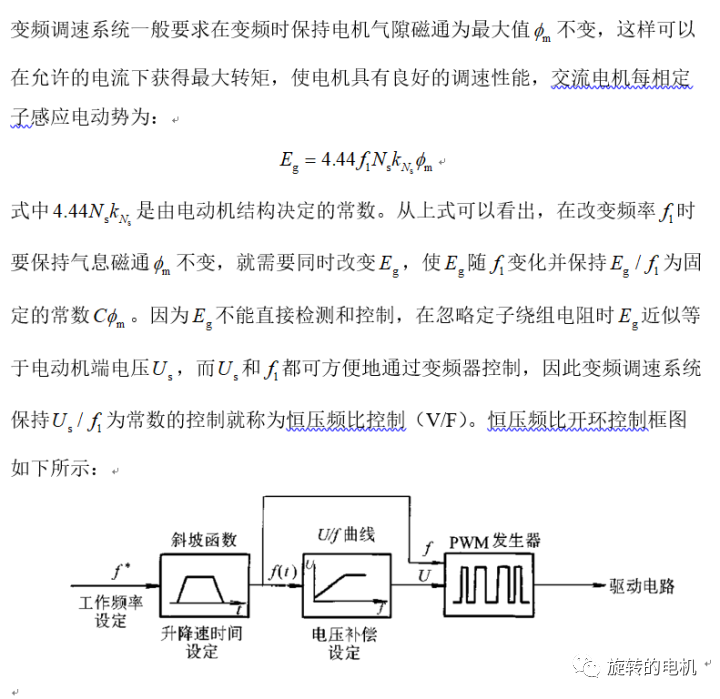
永磁同步電機恒壓頻比開環控制系統Matlab/Simulink仿真分析(一)
永磁同步電機流頻比I/F控制原理及Matlab/Simulink仿真分析





 工商網監
工商網監
評論