

前言
本章節采用工程設計的方法,推導轉速環PI調節器參數的計算公式,由此來設計永磁同步電機磁場定向控制的轉速外環PI調節器參數,并通過Matlab/Simulink對設計的PI調節器進行Bode圖分析,最后通過一個設計實例進行仿真驗證。
一、調節器的工程設計方法
要實現調節器的工程設計方法,首先要簡化問題,突出設計的主要矛盾。簡化的基本思路就是把調節器的設計過程分成兩步:
1、選擇調節器的結構,以確保系統穩定,同時滿足所需要的穩態精度
2、再選擇調節器的參數,以滿足系統動態性能指標的要求
選擇調節器的結構,使系統能滿足所需要的穩態精度,這是設計過程中的第一步。由于III型及III型以上的系統很難穩定,因此常把I型系統和II型系統作為系統設計的目標。
二、轉速環PI調節器的參數整定
工程設計方法的原則是:先設計內環后設計外環,上一章節設計了永磁同步電機磁場定向控制的電流內環PI調節器,本章節接著設計轉速外環PI調節器,不同于將電流內環校正為典型I型系統, 轉速外環的設計目標是將系統校正為典型II型系統 。
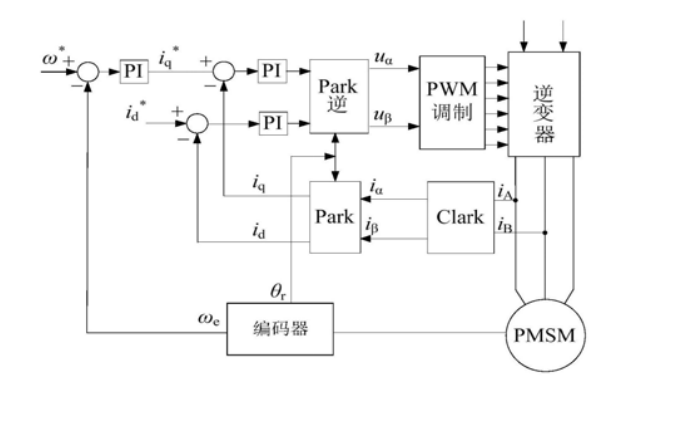
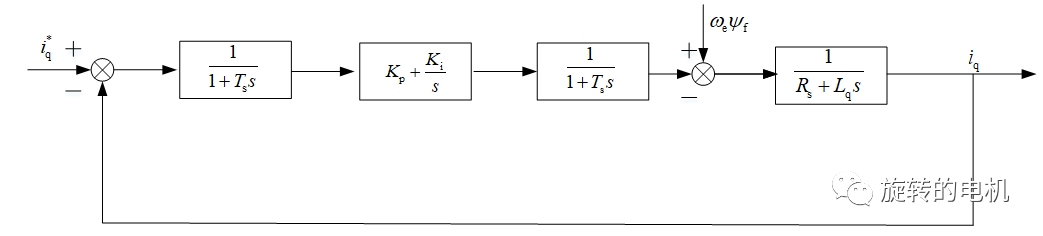
2.1.轉速環的結構框圖
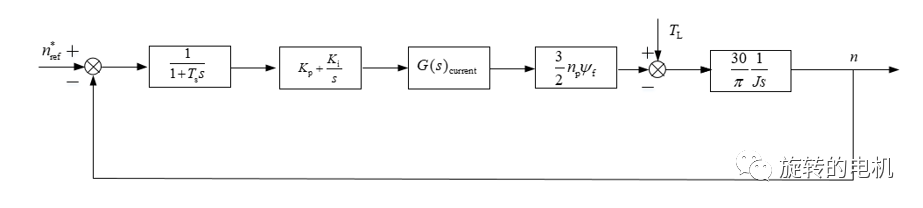
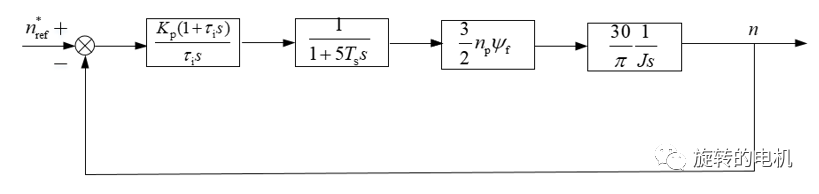
控制系統的數學模型是進行設計的基礎,下圖為轉速環的結構框圖:
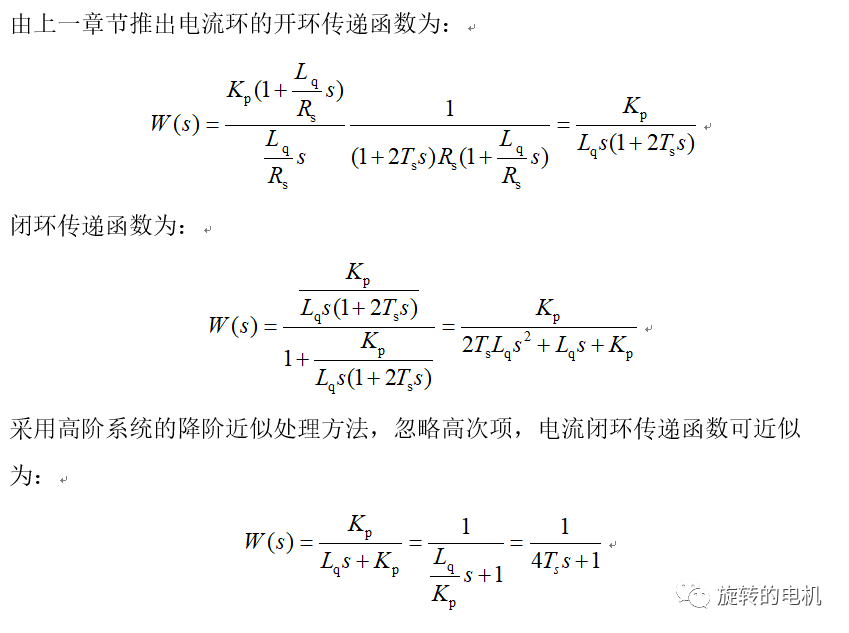
將電流環的等效傳遞函數填入轉速環的結構框圖如下:
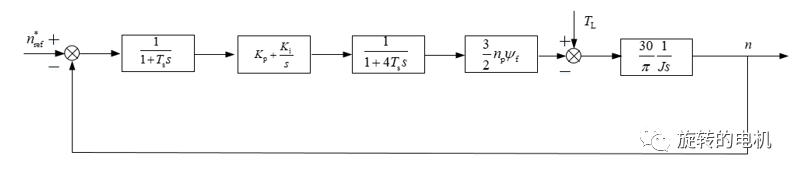
通過下述處理,進一步簡化轉速環的結構框圖:
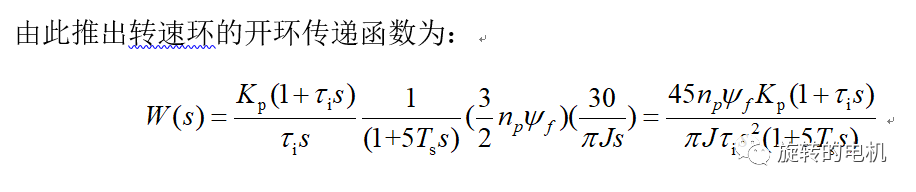
簡化后的轉速環結構框圖為:
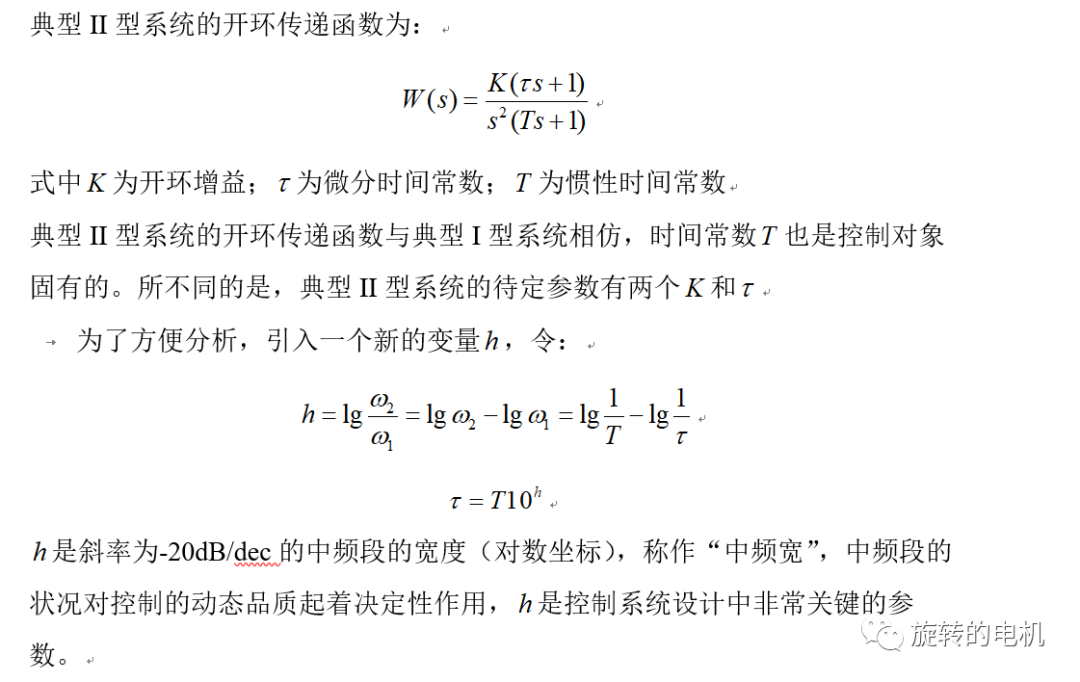
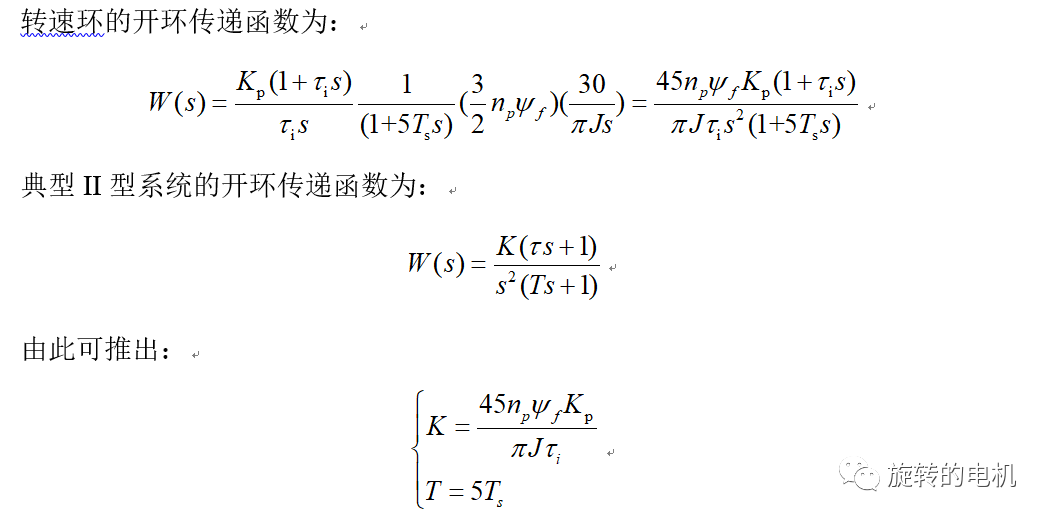
2.2.典型II型系統

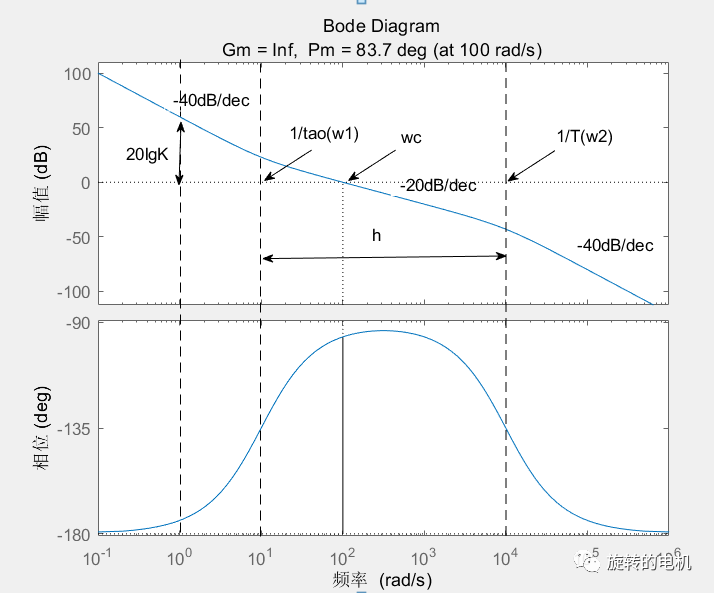
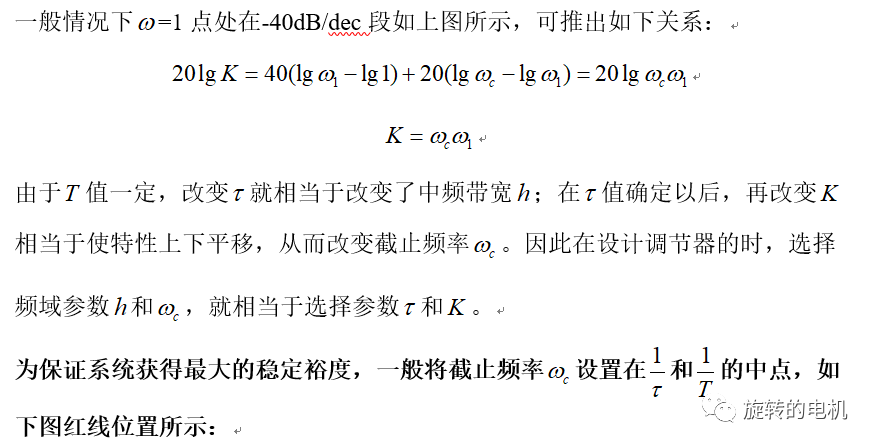
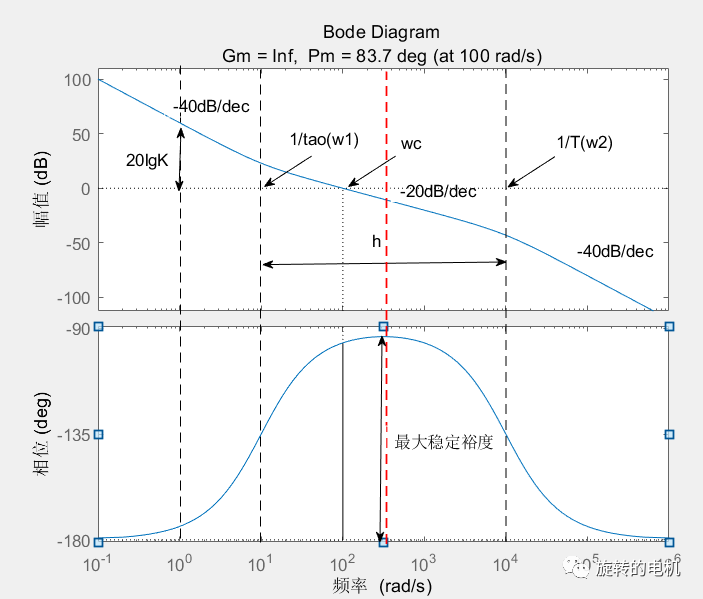
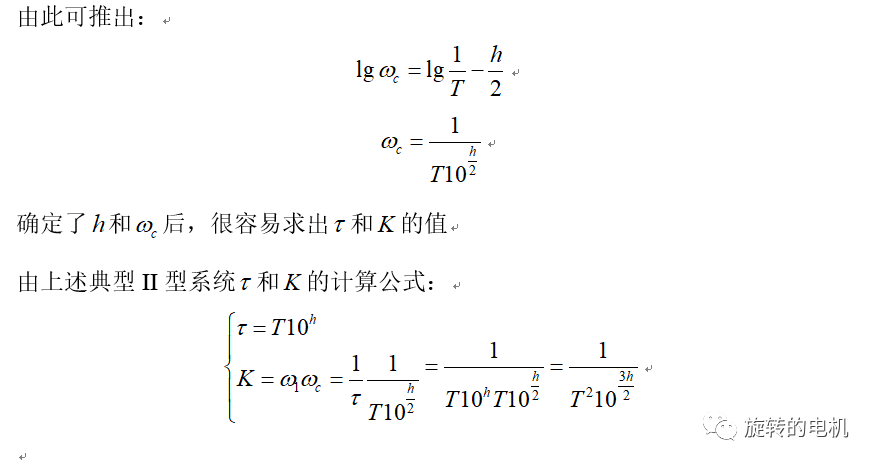
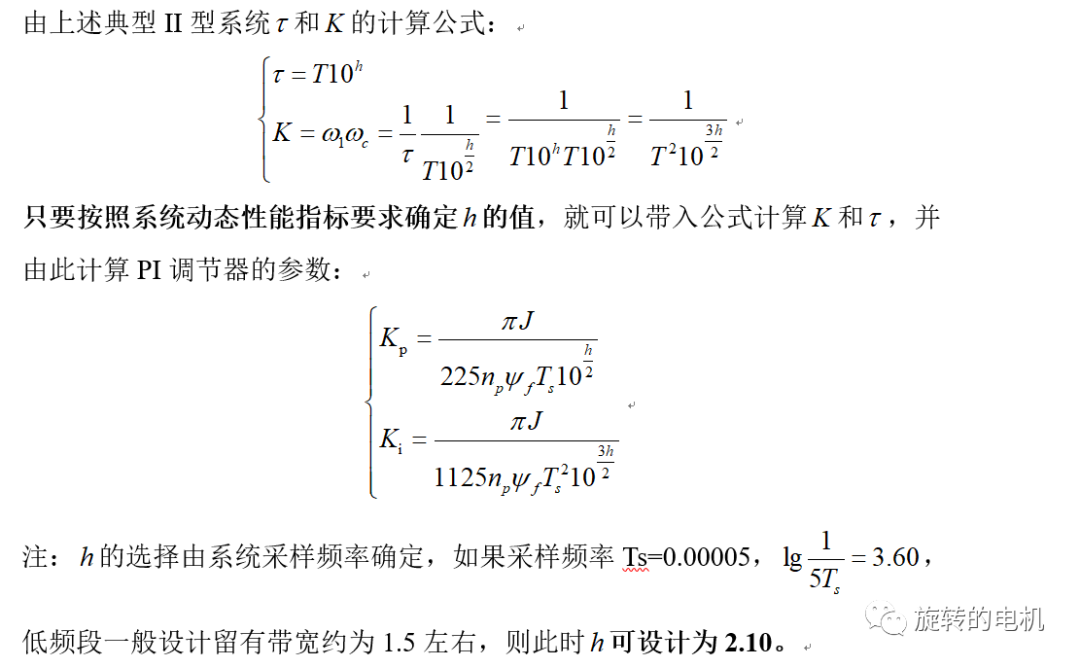
2.3.轉速環PI參數整定計算公式
三、轉速環PI調節器設計實例
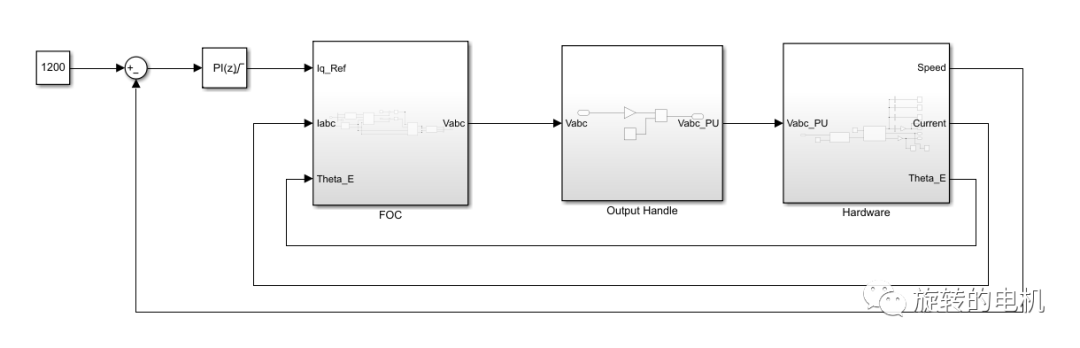
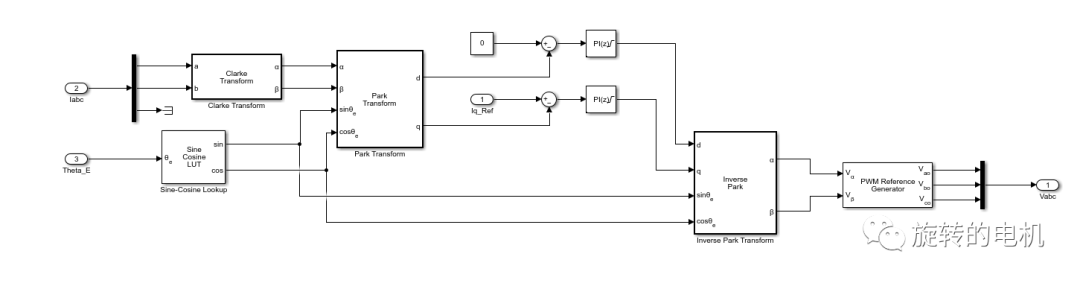
3.1.永磁同步電機磁場定向的轉速外環電流內環雙閉環控制
3.2.轉速環PI參數計算
電機參數如下:
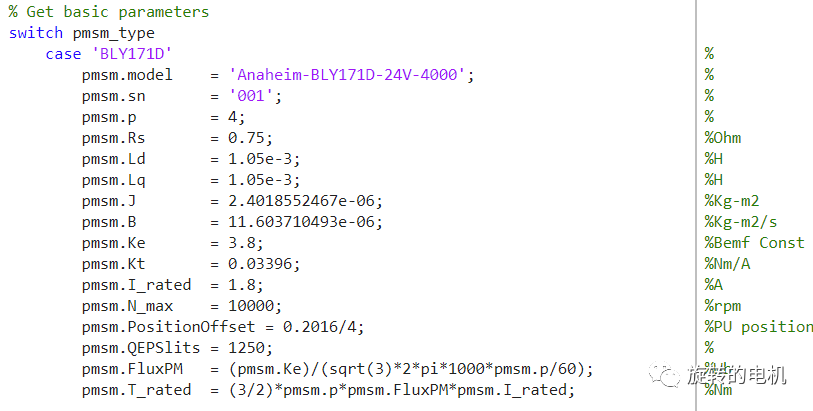
設定系統采樣頻率為20KHz,即Ts=0.00005s,h設計為2.1,由轉速環PI調節器參數計算公式得:
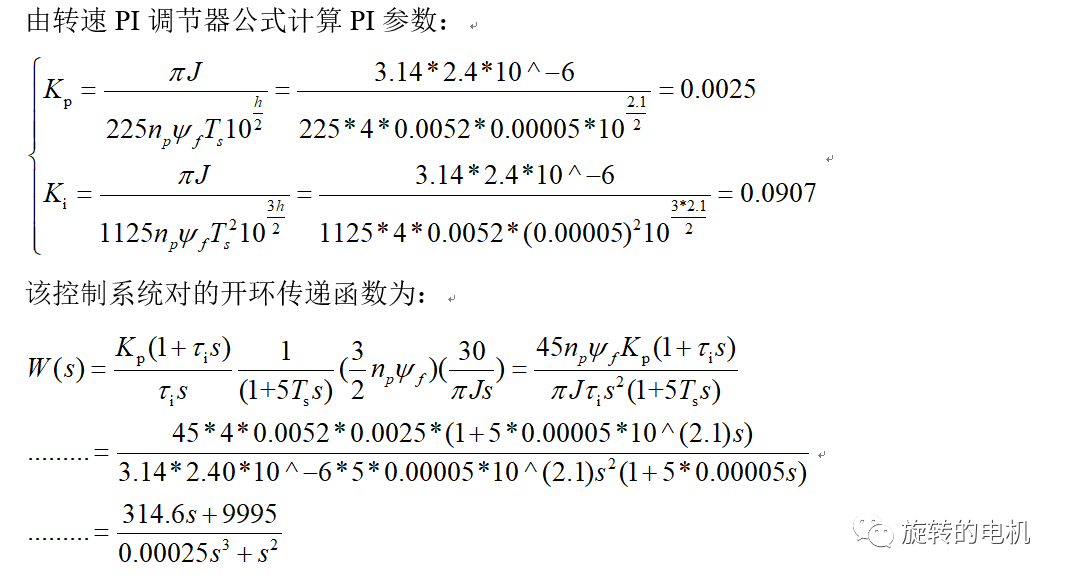
繪制該系統開環Bode圖如下:
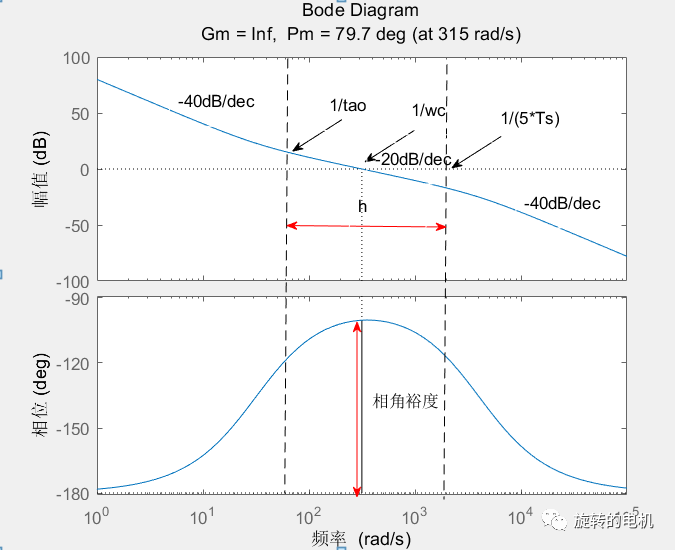
該系統的截止頻率wc為315rad/s位于1/tao和1/T的中間,此時獲得系統最大相角裕度為79.7度,符合自己的設計要求。
繪制該系統的閉環Bode圖如下:
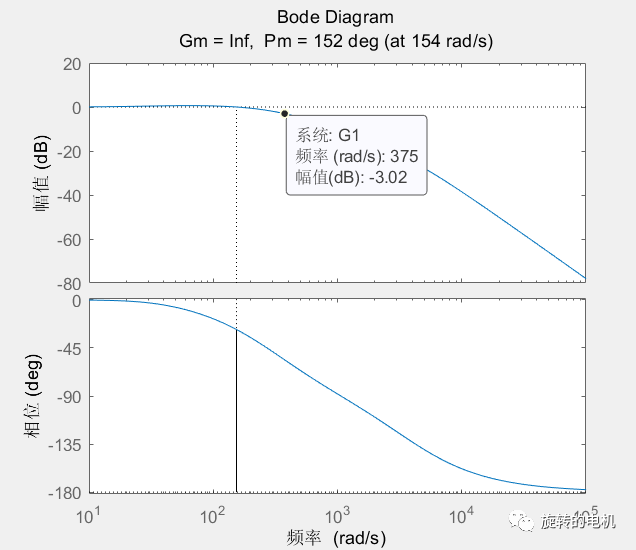
由上圖可知該系統的帶寬頻率約為375rad/s。
3.3.仿真分析
將Kp=0.0025,Ki=0.0907帶入仿真模型的轉速環PI調節器中,上一章節計算出的電流內環PI參數Kp=5.25,Ki=3750帶入兩個電流環調節器中,進行仿真分析:
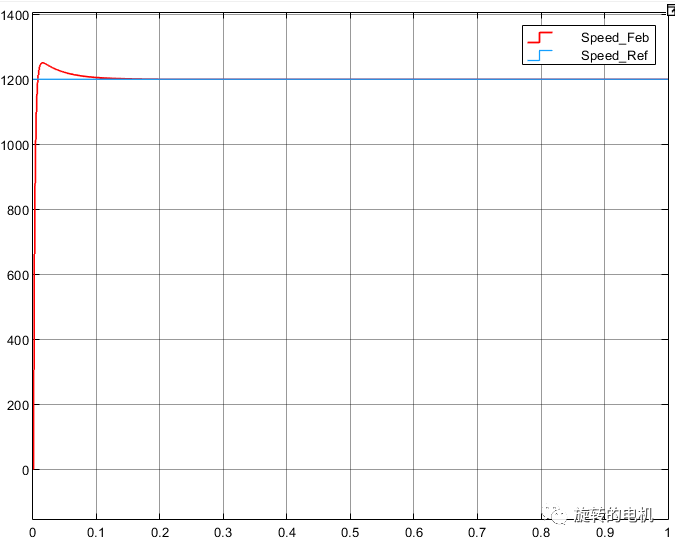
電機轉速:如果控制效果不好可以在工程設計參數的基礎上進行參數微調也可以重新選擇h值進行上述計算。
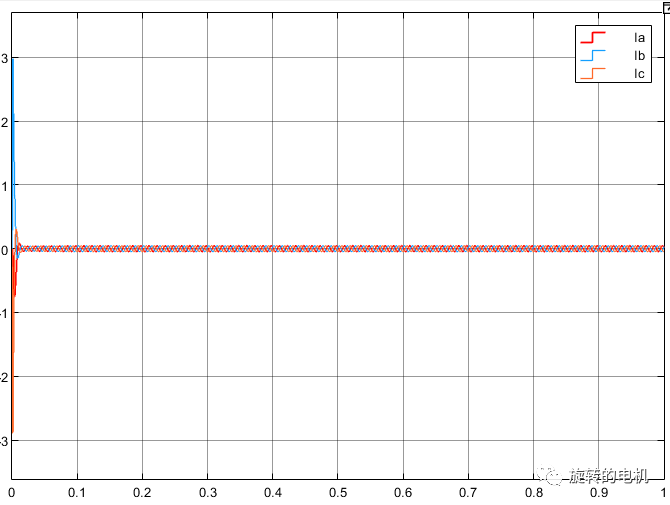
電機定子電流:
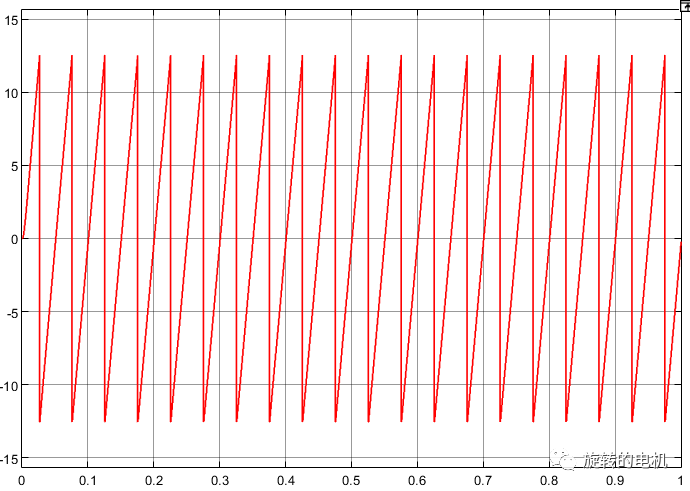
轉子位置:
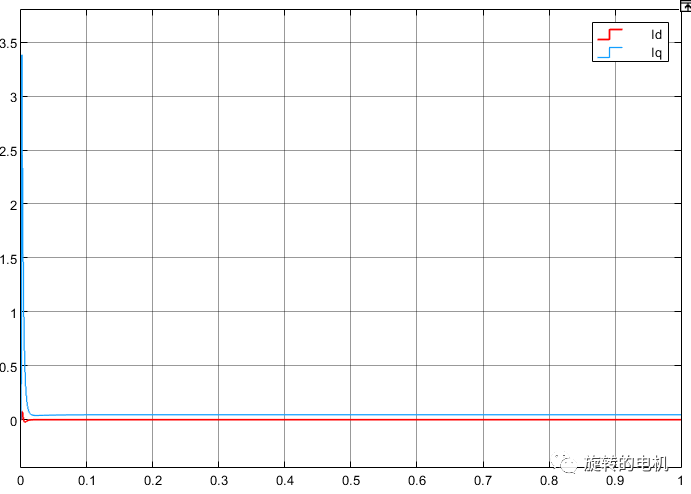
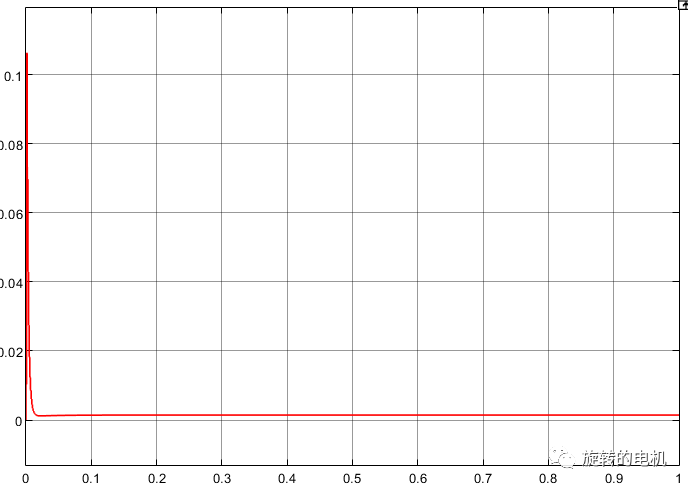
同步旋轉坐標系下的定子電流Id、Iq:
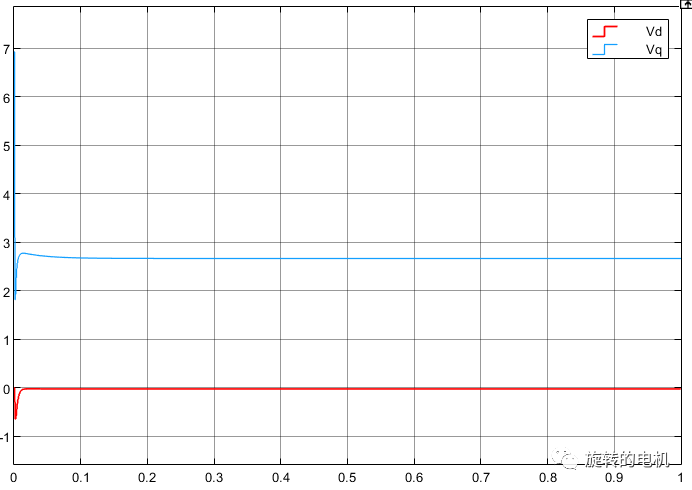
同步旋轉坐標系下的定子電壓:
電磁轉矩:
總結
本章節采用工程設計的方法,推導出了轉速環PI調節器參數的計算公式,由此來設計永磁同步電機磁場定向控制的轉速外環PI調節器參數,并通過Matlab/Simulink對設計的PI調節器進行了Bode圖分析,最后通過一個設計實例進行了仿真驗證,為后續章節的分析奠定基礎。
-
matlab
+關注
關注
187文章
2990瀏覽量
232772 -
永磁同步電機
+關注
關注
28文章
876瀏覽量
50091 -
Simulink
+關注
關注
22文章
538瀏覽量
63421 -
磁場定向控制
+關注
關注
0文章
16瀏覽量
10520 -
PI調節器
+關注
關注
1文章
21瀏覽量
8564
發布評論請先 登錄
相關推薦
永磁同步電機基于轉子磁場定向的雙閉環控制里面電流環的設計為何要讓大時間常數與調節器的零點對消?
永磁同步電機轉速電流雙閉環PI參數整定

永磁同步電機(PMSM)磁場定向控制(FOC)電流環PI調節器參數整定





 工商網監
工商網監

評論