


上期回顧:汽車電子中,識破開關頻率的凡爾賽文學(下篇)
各位攻城獅朋友們,好久不見!電源小課堂第四季全新回歸~這一季,我們將給大家帶來更有價值的電源知識,內容多多,誠意不變,歡迎大家持續關注!
本期內容上回說到,初出茅廬的步進電機通過磨練習得了細分控制,并且獲得了武林同僚們的認可,它被廣泛應用在各個領域當中。
但是,如果步進電機轉子遇到失步,甚至更加惡劣的堵轉時,又沒有后續的診斷和解決策略,那么終端產品將無法發揮出所需的實力。
例如,在安防行業的球機應用中,如果球機攝像頭在旋轉過程中遇到失步和堵轉的問題,就無法準確捕獲到所需位置的圖像。

在打印機的應用中,如果打印的轉軸遇到了旋轉失步或者堵轉的問題,打印出來的紙張文字間距就會不均勻。
所以步進電機想要在電機領域內更進一步,堵轉和失步的問題是需要突破的一大難關,這次它又是何應對的呢?在說明這個問題之前,我們還是需要進一步認識步進電機的控制系統和特性。
觀看視頻
視頻文字部分
步進電機開環位置控制系統
步進電機開環位置控制系統主要由三部分構成: MCU(進行步進脈沖和方向指令發送)、雙全橋驅動以及步進電機(見圖1)。
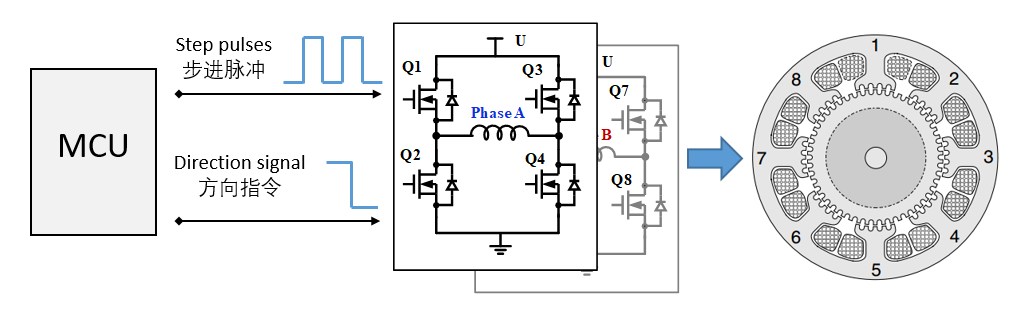
圖1 步進電機開環位置控制系統框圖
MCU發送步進脈沖和方向指令,雙全橋驅動根據控制指令輸出功率,驅動步進電機旋轉。MCU每發送一個脈沖,步進電機就按照步進模式旋轉一個電氣角度,所發送的脈沖頻率越高,相應的步進頻率也就越高,步進電機就旋轉得越快。每秒的脈沖數量稱之為PPS(脈沖頻率),代表了步進電機的旋轉速度。
步進電機能夠輸出的負載轉矩,由兩個參數來表示:牽入轉矩和牽出轉矩。這兩個參數可以在坐標軸上清晰地表現出來,以PPS為橫坐標,動態轉矩為縱坐標,步進電機會獲得牽入轉矩和牽出轉矩曲線(圖2)。
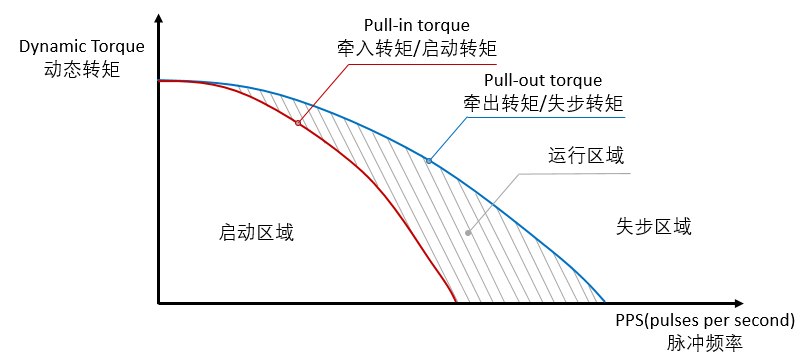
圖2 步進電機牽入/牽出轉矩曲線
牽入轉矩指步進電機在不失步的情況下能夠按照給定的步進頻率,克服轉子慣量,負載和摩擦力的情況下,確保啟動的加速轉矩。只要負載大小在牽入轉矩的曲線區域內,也就是啟動區域內,就能夠進行正常的起步。
牽出轉矩
指步進電機在不失步的前提下,能夠連續恒速運轉時,轉軸端可以提供的最大轉矩。
在牽入和牽出轉矩曲線之間是步進電機的帶載連續運行區域。如果負載或者步進頻率進一步增加,步進電機就會無法提供相應的轉矩,就會處于失步區域。這是因為在更高的步進頻率或者更重的負載情況下,步進電機轉子實際的轉動頻率無法跟上定子磁場變換的頻率。如果負載在此時更進一步的加重,嚴重情況下,將會導致轉子直接堵轉。
那么在實際的應用中,將如何應對步進電機的失步和堵轉呢?
“乾坤大挪移”為了應對失步和堵轉,步進電機需要更進一步地練習新的功法---“乾坤大挪移”。
該功法主要分為外功招式和內功心法。外功招式就是有感控制,內功心法則是無感的診斷方法。本篇內容主要是對有感控制進行詳細地介紹,無感的診斷方法將會出現在下篇內容中。
有感控制
指步進電機在不失步的情況下能夠按照給定的步進頻率,克服轉子慣量,負載和摩擦力的情況下,確保啟動的加速轉矩。只要負載大小在牽入轉矩的曲線區域內,也就是啟動區域內,就能夠進行正常的起步。
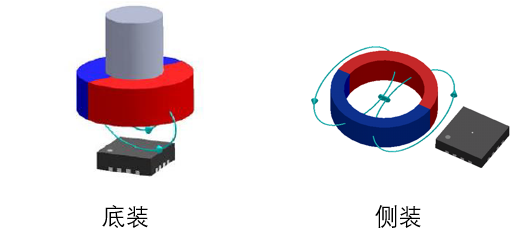
圖3 磁編碼器安裝結構
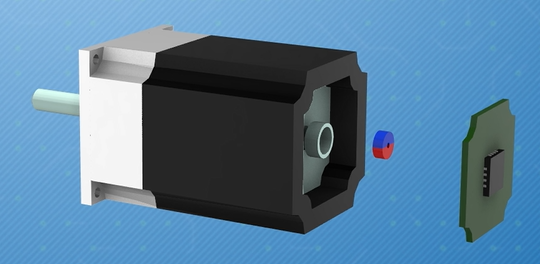
圖4 步進電機磁編碼器底裝示意圖
磁編碼器能夠輸出多種角度信號形式,來滿足不同要求下的應用。
[A/B/Z 信號]A/B/Z信號是一種增量型的脈沖輸出信號。(圖5)
A相和B相信號會在旋轉的每圈 (360°)輸出固定數量的脈沖方波。磁編碼器的分辨率越高,脈沖數目就越多。MCU通過對脈沖數目的捕獲就能計算出步進電機轉子旋轉的角度大小,見公式(1)。
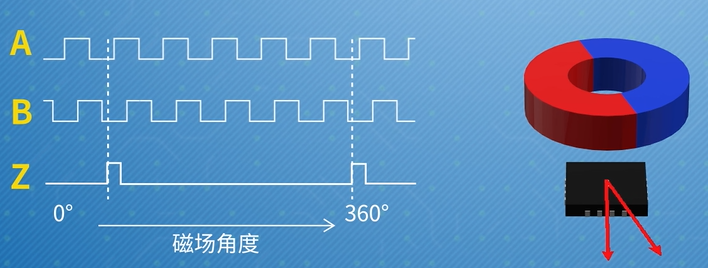
圖5 A/B/Z 角度信號

公式(1)
其中,Angle為轉子轉過的角度,count為A相合B相的脈沖數目以及上升和下降沿總和, bit為磁編碼器的分辨率。A相和B相信號在相位上會相差90度,通過對A相和B相信號之間相位角的超前或者滯后的檢測,來判斷轉子是進行了順時針還是逆時針的旋轉。Z相信號在每圈只會輸出一個脈沖,主要是用來做圈數角度的校準使用。
[寄存器數值]角度信號也可以通過讀取磁編碼器寄存器獲得(圖6),這是一種絕對式的位置角度信號。無論轉子停在哪一個位置,都能有唯一對應的磁場位置和角度信號。通過對讀取到的值進行角度計算,就可以獲得轉子的旋轉角度,見公式(2)。

公式(2)
其中,Register為讀取的寄存器值大小,bit為磁編碼器的分辨率。
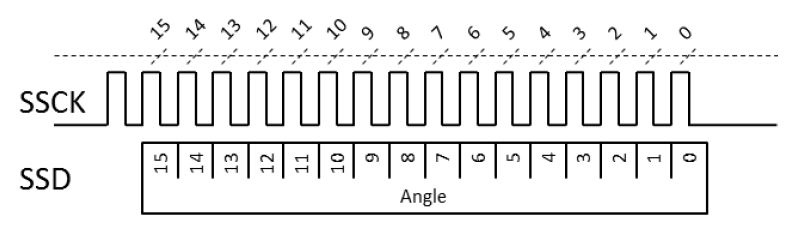
圖6 角度寄存器
[ 角度補償]有了角度信息的輸入,步進電機就仿佛知道了破綻所在。通過對比MCU輸出的角度指令PPS和角度傳感器反饋的角度信號,就能知道步進電機目前是否處于失步和堵轉狀態。通過發送補償指令,控制步進電機轉動,進行角度補償。
控制的方式可以是半閉環的位置控制,MCU輸出補償脈沖進行角度補償。(圖7)
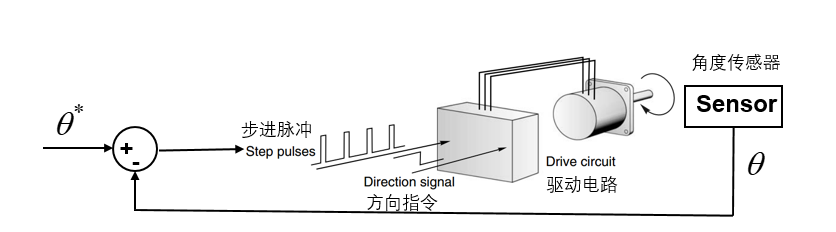
圖7 步進電機的位置半閉環控制
角度補償也可以是更為復雜和難度較高的位置閉環控制。用獲得的轉子角度信息,對步進電機的A相和B相電流進行空間坐標變換,形成轉子位置和dq坐標電流的雙閉環控制,就能獲得更好的性能。(圖8)
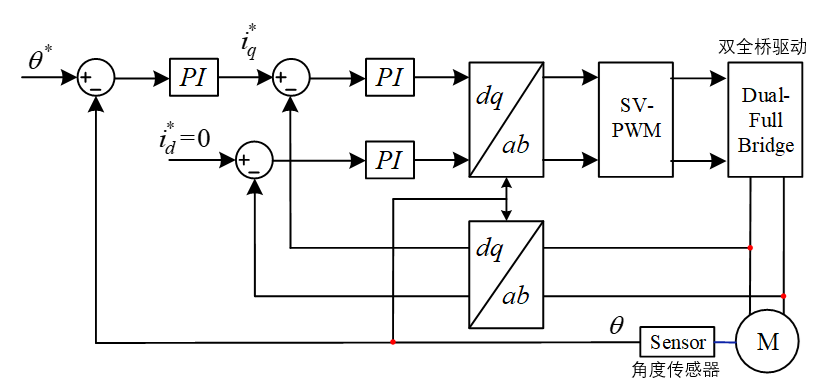
圖8 步進電機的位置閉環控制
這里涉及的一些更深入的技術知識大家可以通過文獻資料進行學習,本篇文章也只是做一個拋磚引玉。那么除了外功招式,內功心法無感的診斷究竟是什么樣子的呢?讓我們下一期再見~
END
▼
往期精彩回顧
▼
第三季第十六話:汽車電子中,識破開關頻率的凡爾賽文學(下篇)
第三季第十五話:汽車電子中,識破開關頻率的凡爾賽文學(上篇)
第三季第十四話:不是所有的升壓都是Boost
第三季第十三話:別讓BOOST規格書標題誤導了你
第三季第十一話:Buck電感的計算
第三季第九話:合適的比例,讓效率曲線更加優美
第三季第八話:如何讓“下電”變的干凈利落
第三季第七話:淺談 POE 握手協議
第三季第六話:細分控制 --- 雙極性步進電機如何練成“凌波微步”(下篇)
第三季第五話:細分控制 --- 雙極性步進電機如何練成“凌波微步”(上篇)
第三季第四話:聊聊功率因數校正那些事兒(下篇)
第三季第三話:聊聊功率因數校正那些事兒(上篇)
第三季第二話:防反電路一定要用 PMOS 嗎?(下篇)
第三季第一話:防反電路一定要用 PMOS 嗎?(上篇)





 點擊“閱讀原文”獲取更多內容
點擊“閱讀原文”獲取更多內容
我知道你在看哦
原文標題:步進電機“乾坤大挪移”之外功招式——有感控制
文章出處:【微信公眾號:MPS芯源系統】歡迎添加關注!文章轉載請注明出處。
-
MPS
+關注
關注
26文章
285瀏覽量
65344
原文標題:步進電機“乾坤大挪移”之外功招式——有感控制
文章出處:【微信號:MPS芯源系統,微信公眾號:MPS芯源系統】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
步進電機的控制實現方法

行星減速步進電機與步進電機的區別








 工商網監
工商網監

評論