") 如何從電機(jī)控制轉(zhuǎn)換為運(yùn)動控制
如何從電機(jī)控制轉(zhuǎn)換為運(yùn)動控制
隨著越來越多的技術(shù)廣泛應(yīng)用于工業(yè)自動化,我們已經(jīng)進(jìn)入了工業(yè)4.0時代。新技術(shù)不斷涌現(xiàn),賦能人工智能和機(jī)器學(xué)習(xí)、數(shù)據(jù)分析、工業(yè)網(wǎng)絡(luò)、網(wǎng)絡(luò)安全和功能安全。然而,大多數(shù)工業(yè)自動化作為其他所有技術(shù)的核心,仍然依靠機(jī)器人和運(yùn)動控制。
運(yùn)動控制與電機(jī)控制經(jīng)常同時出現(xiàn),有點(diǎn)讓人混淆。這兩個概念有什么區(qū)別?在工業(yè)自動化中,我們?nèi)绾螌⑶‘?dāng)?shù)慕鉀Q方案應(yīng)用于其中一個概念,或同時應(yīng)用于這兩個概念?歡迎繼續(xù)閱讀,了解運(yùn)動控制和電機(jī)控制的區(qū)別以及如何使它們協(xié)同工作。
什么是運(yùn)動控制?
運(yùn)動控制是工業(yè)自動化系統(tǒng)的子系統(tǒng)。它同步化控制多個電機(jī)來完成一系列運(yùn)動。例如,多軸機(jī)械臂需要多個電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動作。運(yùn)動控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動學(xué)轉(zhuǎn)換。運(yùn)動控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
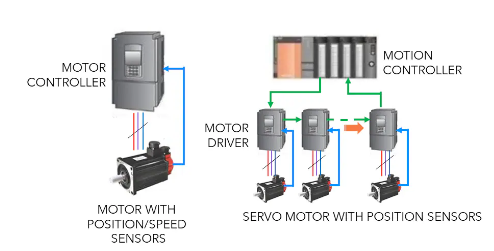
如下所示,運(yùn)動控制系統(tǒng)通常由以下主要組件組成:
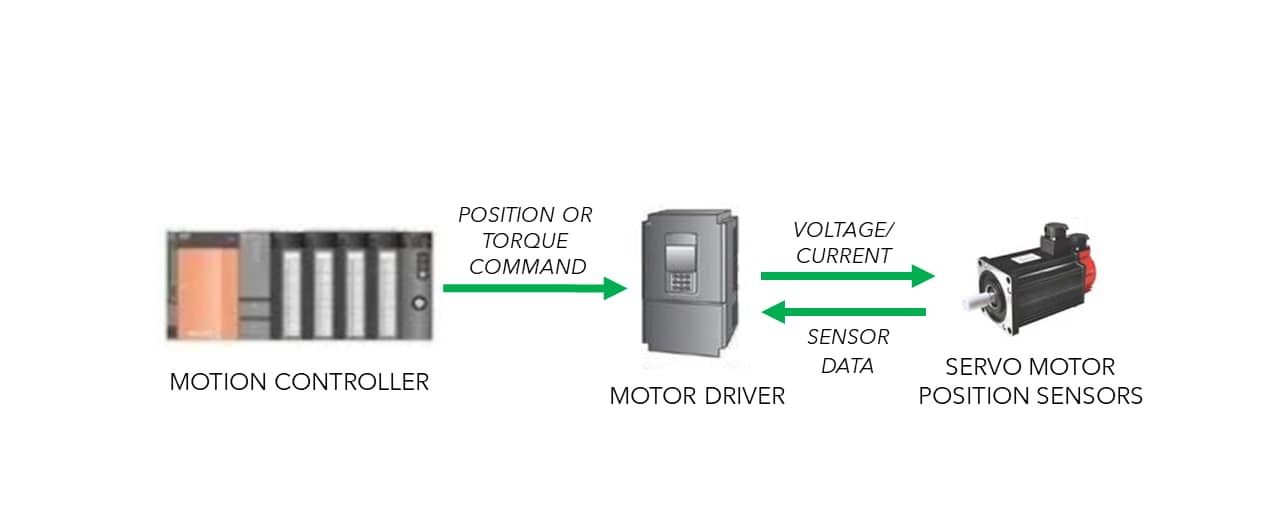
運(yùn)動控制器,可生成軌跡規(guī)劃,然后向電機(jī)驅(qū)動器提供控制命令。
電機(jī)驅(qū)動器,將運(yùn)動控制器的控制命令(通常是速度或扭矩信號)轉(zhuǎn)換為更高功率電壓或電流信號來驅(qū)動電機(jī)
數(shù)個電機(jī),可根據(jù)控制命令執(zhí)行運(yùn)動
位置傳感器,將電機(jī)轉(zhuǎn)子的位置/速度數(shù)據(jù)提供給位置/速度控制器,實現(xiàn)精確的位置/速度控制
電機(jī)控制與運(yùn)動控制
另一方面,電機(jī)控制是更側(cè)重于控制電機(jī)旋轉(zhuǎn)的系統(tǒng)或技術(shù)。典型的電機(jī)控制系統(tǒng)調(diào)整單個電機(jī)的扭矩、速度和位置的一個或多個參數(shù),以達(dá)到目標(biāo)值。電機(jī)的類型不同,驅(qū)動電機(jī)的要求和技術(shù)可能會有很大差異。電機(jī)控制器通常沒有規(guī)劃能力(高級驅(qū)動器只有簡單的位置和速度規(guī)劃能力)。因此,解釋電機(jī)控制和運(yùn)動控制區(qū)別的簡單方法是:
電機(jī)控制是運(yùn)動控制系統(tǒng)的一個環(huán)節(jié)(通常是電流環(huán),在扭矩控制模式下工作)
但是,有時我們可能會混淆它們,因為電機(jī)控制的位置環(huán)/速度環(huán)/扭矩環(huán)既可以在電機(jī)控制器中使用,也可以在運(yùn)動控制器中使用
現(xiàn)在我們知道了這兩個系統(tǒng)之間的差異,顯而易見,它們的設(shè)計要求及資源也大不相同。
電機(jī)控制更側(cè)重于使電機(jī)正常旋轉(zhuǎn),或者更確切地說,是換向。為了做到這一點(diǎn),電機(jī)控制器需要與各種傳感器對接,處理模擬和數(shù)字信號,并生成波形來驅(qū)動電機(jī)。所有這些都發(fā)生在非常短的時間環(huán)路內(nèi),范圍從50微秒到300微秒。
然而,運(yùn)動控制通常充當(dāng)系統(tǒng)監(jiān)控器,需要在多個電機(jī)控制器之間、通過以太網(wǎng)(EtherCAT和TSN.)、CAN、RS485的數(shù)據(jù)等其他來源之間,以及人機(jī)界面(HMI)面板的命令之間進(jìn)行通信。如上所述,運(yùn)動控制器還可以參與一些電機(jī)控制任務(wù),例如控制速度環(huán)、位置環(huán),甚至扭矩環(huán)。因此,運(yùn)動控制器的實時控制環(huán)路可以從100微秒到數(shù)百毫秒不等,具體取決于運(yùn)動控制器參與的實際任務(wù)。
運(yùn)動控制系統(tǒng)的設(shè)計
運(yùn)動控制系統(tǒng)的設(shè)計可能相當(dāng)復(fù)雜,涵蓋了電機(jī)控制、工業(yè)網(wǎng)絡(luò)、人機(jī)界面、編解碼器、信息安全和功能安全等許多方面。因此,它需要多個控制單元在系統(tǒng)中相互協(xié)調(diào)。
這里就需要全套器件方便運(yùn)動控制設(shè)計人員選擇——也是恩智浦及其廣泛的微控制器(MCU)和微處理器(MPU)產(chǎn)品組合的用武之地。
在電機(jī)控制器方面,恩智浦的Kinetis V MCU、Kinetis E MCU、LPC MCU和數(shù)字信號控制器(DSC)提供了多種選擇,從使用ARM?Cortex?-M0+內(nèi)核控制簡單電機(jī),到使用Cortex-M33內(nèi)核或高效DSC內(nèi)核在雙電機(jī)上運(yùn)行FOC算法。使用備受歡迎的無閃存i.MX RT跨界MCU,可以同時精確控制更多電機(jī)。這些MCU不僅具有廣泛的處理能力可供選擇,還集成了非常適合電機(jī)控制的外設(shè),如高速的高精度ADC、高速比較器、靈活的電機(jī)控制定時器和PWM以及DSP加速度傳感器。故障檢測和自動關(guān)機(jī)等安全功能可以與這些器件提供的工業(yè)安全合規(guī)性無縫協(xié)作。
而在運(yùn)動控制器方面,恩智浦提供i.MX RT跨界MCU和MPU產(chǎn)品線,包括Layerscape和i.MX系列處理器。這些器件支持集成豐富的工業(yè)通信接口,例如以太網(wǎng)/IP、Profinet、EtherCAT和TSN等接口。多核架構(gòu)為通信協(xié)議、運(yùn)動軌跡規(guī)劃和實時環(huán)路控制提供了足夠的動力。它們還配備了先進(jìn)的計時器,以支持多模式計數(shù)和靈活的脈沖串輸出。
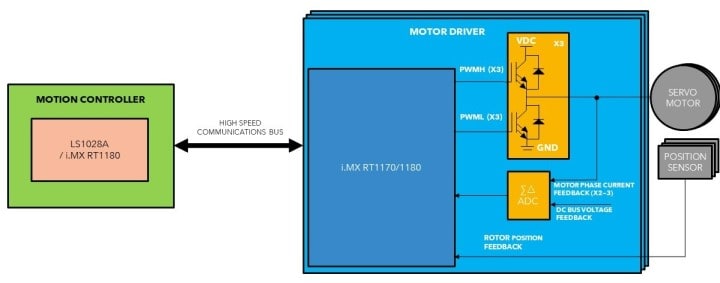
如圖所示,運(yùn)動控制系統(tǒng)可以使用大量的MCU和MPU來實現(xiàn)多個電機(jī)驅(qū)動器,促進(jìn)各個機(jī)械臂協(xié)同運(yùn)動。
為了加快運(yùn)動控制系統(tǒng)的上市,我們迫切需要一種快速簡便的概念驗證和原型制作方法。因此,恩智浦一直在開發(fā)參考設(shè)計平臺,以提供豐富的工業(yè)運(yùn)動控制功能并符合工業(yè)自動化標(biāo)準(zhǔn)。我們最近推出了i.MX RT工業(yè)驅(qū)動開發(fā)平臺,該平臺基于i.MX RT跨界MCU,具有多電機(jī)控制、確定性通信和符合IEC 62443安全標(biāo)準(zhǔn)的基礎(chǔ)。四電機(jī)控制開發(fā)平臺現(xiàn)已上市,可支持全套恩智浦產(chǎn)品,包括i.MX RT跨界MCU和EdgeLock? SE050安全元件。這些器件協(xié)同工作,展示了工業(yè)電機(jī)控制系統(tǒng)所需的功能,例如電源管理、驅(qū)動四個電機(jī)、工業(yè)通信接口、HMI觸摸面板界面和安全集成。
綜上所述,本文介紹了運(yùn)動控制的定義、電機(jī)控制和運(yùn)動控制的區(qū)別,以及運(yùn)動控制系統(tǒng)設(shè)計要求的行業(yè)趨勢。繼續(xù)關(guān)注恩智浦,了解更多電機(jī)控制解決方案。
審核編輯:郭婷
-
處理器
+關(guān)注
關(guān)注
68文章
19286瀏覽量
229817 -
mcu
+關(guān)注
關(guān)注
146文章
17148瀏覽量
351186 -
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5424瀏覽量
171702 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9020瀏覽量
145481
發(fā)布評論請先 登錄
相關(guān)推薦
步進(jìn)電機(jī)運(yùn)動控制策略
運(yùn)動控制
運(yùn)動控制基礎(chǔ)-電機(jī)基礎(chǔ)
運(yùn)動控制和電機(jī)控制的區(qū)別是什么?
運(yùn)動控制器、運(yùn)動控制卡、PLC、CNC的關(guān)系
步進(jìn)電機(jī)的速度控制及運(yùn)動規(guī)律
運(yùn)動控制的定義、電機(jī)控制和運(yùn)動控制的區(qū)別
如何從電機(jī)控制轉(zhuǎn)換為運(yùn)動控制
STM32實現(xiàn)多步進(jìn)電機(jī)的加減速運(yùn)動控制

如何從電機(jī)控制轉(zhuǎn)換為運(yùn)動控制

如何從電機(jī)控制轉(zhuǎn)換為運(yùn)動控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論