") 編碼器在伺服的作用與常見伺服編碼器
編碼器在伺服的作用與常見伺服編碼器
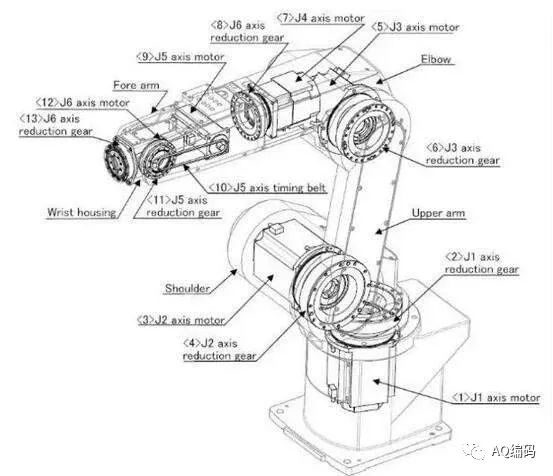
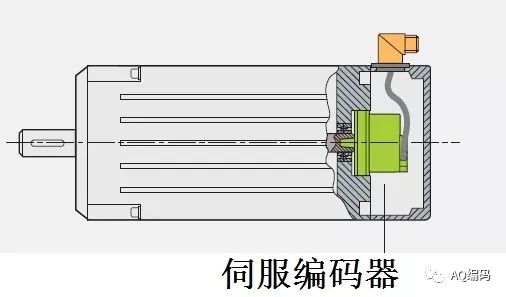
伺服編碼器是工業(yè)機器人技術(shù)核心伺服電機的必配,對于伺服電機性能乃至機器人性能的作用極為關(guān)鍵。不僅僅是工業(yè)機器人,伺服電機在自動化應(yīng)用已越來越廣泛。隨著工業(yè)機器人大熱,而其中的伺服編碼器也成為自動化行業(yè)關(guān)注的焦點之一。
(圖片來自于網(wǎng)絡(luò))
工業(yè)編碼器的市場大致可分為自動化加工應(yīng)用類(FA)編碼器、過程控制及記錄類(PA)編碼器、高精度測量類編碼器、數(shù)字信息化應(yīng)用類編碼器、安全保護(hù)類編碼器、內(nèi)置儀表類編碼器等等,其中在自動化加工應(yīng)用類編碼器中,又由于伺服電機的熱度分出了電機反饋專用型編碼器—伺服反饋編碼器和矢量變頻反饋編碼器。由于近年來伺服電機的迅猛發(fā)展和工業(yè)機器人熱點,有關(guān)伺服編碼器的話題很熱,也頗有困惑與爭議。我在此伺服編碼器簡介系列的介紹中,與網(wǎng)友們共同探討伺服編碼器的各種特點與爭論疑點。

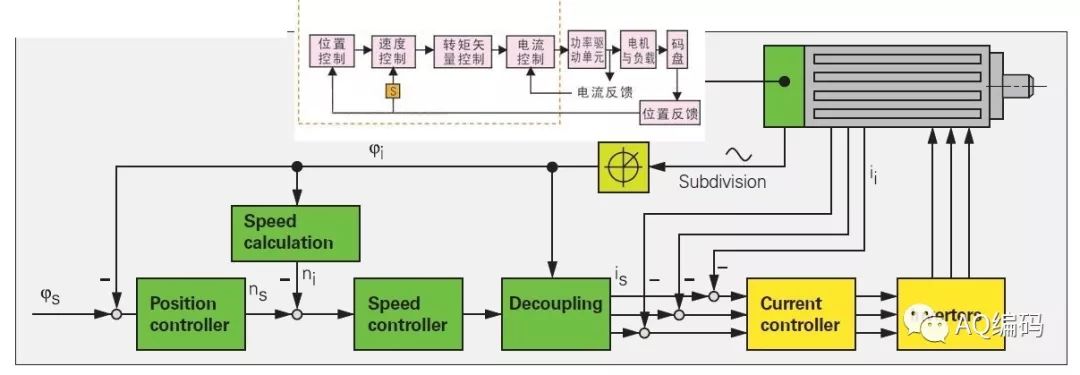
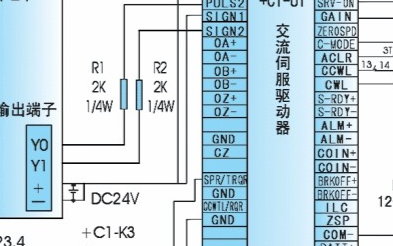
伺服電機與變頻電機根本的不同是必須配有編碼器反饋,在每一個時刻的位置環(huán)、速度環(huán)和電流環(huán)的三閉環(huán)控制。如下圖:
伺服反饋編碼器對伺服電機的重要特性具有決定性的影響:
1, 定位精度
2, 速度穩(wěn)定性
3, 帶寬,它決定驅(qū)動指令的響應(yīng)時間和抗干擾性能
4, 伺服剛性
5, 電機尺寸
6, 功率損耗
7, 噪音與發(fā)熱
8, 安全性
其中特別是伺服編碼器在輸出信號特征上與普通編碼器的不同:
1,驅(qū)動換向信號組:伺服編碼器(同步伺服電機)與普通編碼器不同的第一個特點,是要提供啟動電流換向的傳感信號反饋。在同步伺服電機的啟動時,電極啟動位置由編碼器提供,對應(yīng)每組UVW繞組的位置反饋,以確定電機繞線組線圈驅(qū)動電流相位。當(dāng)伺服控制需要加速、減速時,通過驅(qū)動電流相位的提前量與滯后量,控制電機的加速與減速轉(zhuǎn)換,以達(dá)到對電機加速度正與反的控制。
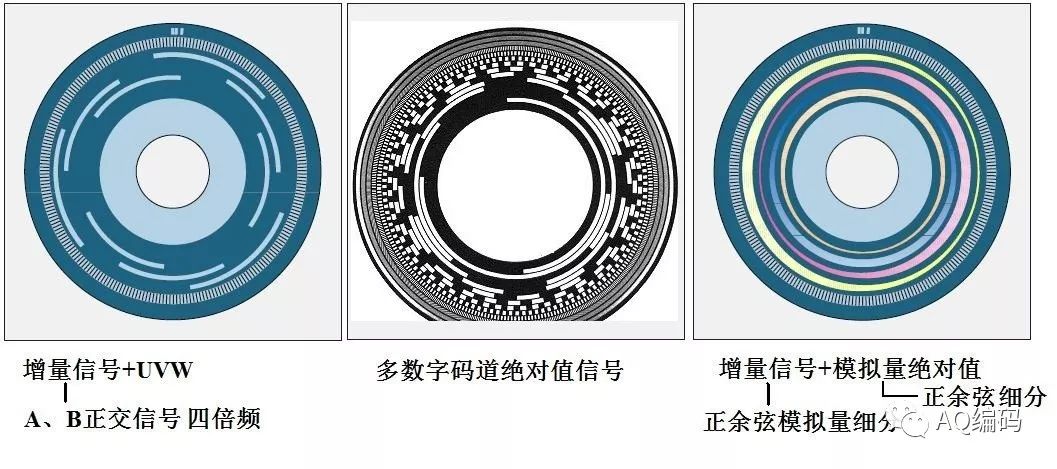
應(yīng)對這樣的位置反饋要求,伺服編碼器換向信號組主要有以下三種形式:
帶有UVW信號

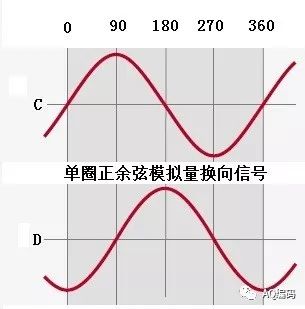
一圈一個周期的正余弦的CD信號(模擬量單圈絕對值信號)
數(shù)字量單圈絕對值編碼器信號
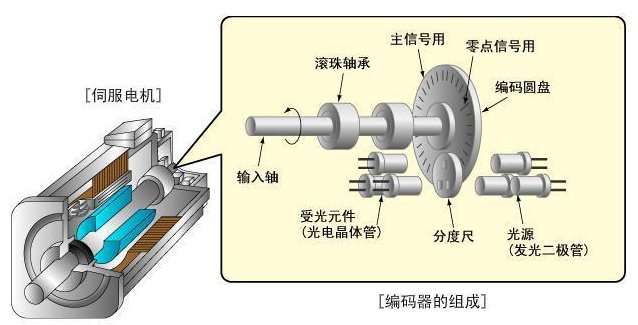
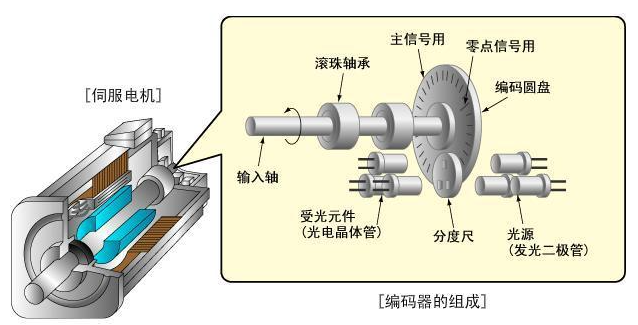
下圖是這三種不同換向信號的光電碼盤
2,高分辨率輸出的信號組:電機轉(zhuǎn)速與加速平穩(wěn)性要求的傳感反饋,需要編碼器輸出的高分辨率信號組。在高速旋轉(zhuǎn)過程中,要求采樣周期盡可能短,而在很短的采樣周期內(nèi)可分辨讀取的變化量信號足夠多,才能得到精確的速度反饋信息。這就需要編碼器具有高分辨率以獲得單位時間內(nèi)更多的角度變化分辨,確定速度計算的精度。
伺服編碼器輸出的這組作為高分辨率的信號常見的也有以下幾種:
2500線方波脈沖信號——四倍頻
2048線AB相正余弦信號——細(xì)分

高位數(shù)的數(shù)字串行信號——17位、19位、22位、25位高分辨率等等。
3,電子標(biāo)簽與安全保護(hù)。編碼器在電機上安裝初始位置的寄存,便于每次電機啟動。以及提供各種參數(shù)保存、校驗碼、預(yù)設(shè)報警等等。如果選用絕對值編碼器,宜選用具有雙向數(shù)字化信號的接口,可實現(xiàn)電機安裝初始化時控制器向編碼器寫入電子標(biāo)簽并保存,例如電機轉(zhuǎn)子原點位置的坐標(biāo)旋轉(zhuǎn)并該單電機永久性保存初始位置。例如保存:2018年1月24日臘八節(jié) @Q
4,綜合特性:精度與輸出刷新周期。伺服電機的加速度、加加速度響應(yīng)及精度的傳感反饋的重要貢獻(xiàn),也就是伺服的剛性.——這才是伺服編碼器綜合性能的核心要素。這需要編碼器在有高分辨率的同時還具有高精度,這個高精度包括角度位置的精度與輸出刷新周期、反饋時間與執(zhí)行到位時間差的時差高精度
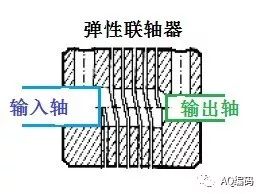
伺服的剛性:
剛性一詞,原本出自于聯(lián)軸器,指聯(lián)軸器兩端輸入軸與輸出軸的聯(lián)結(jié)是剛性的還是柔性的,如果是剛性聯(lián)接,那么輸入軸旋轉(zhuǎn)時,輸出軸在旋轉(zhuǎn)角度與時間響應(yīng)上沒有任何損失。而如果是柔性的聯(lián)接,由于有柔性彈性,在角度與時間響應(yīng)上會有損失,或振蕩。在伺服控制中,伺服剛性是指輸入伺服控制指令到系統(tǒng)輸出的速度與位置的執(zhí)行到位能力,尤其是在快速的變加速度中指令輸入與系統(tǒng)執(zhí)行輸出到位的響應(yīng)程度。或者說伺服的“聽話程度”。

伺服剛性取決于編碼器的精度、輸出刷新率,到伺服電機的軸系精度、伺服運算與輸出響應(yīng),力矩與負(fù)載的變化、調(diào)制補償算法等等很多因素,由于伺服算法獲得信息的來源是編碼器信號的反饋,因此要做好伺服剛性首先就是要有合適的伺服編碼器性能與之匹配,這其中最主要的就是編碼器的精度與信號輸出刷新時間。目前市場上對伺服編碼器精度理解常常僅以編碼器的分辨率來理解,事實上編碼器的分辨率與精度是兩個概念,而信號輸出的刷新周期,也就是編碼器的各種數(shù)字信號比較,也是市場上議論的焦點,在本系列的后面幾篇我試圖來與網(wǎng)友們討論交流這些問題.
5,全閉環(huán)編碼器:直驅(qū)伺服電機(DD馬達(dá))和直線驅(qū)動電機無需減速機構(gòu),直接輸出力矩與位置定位,其所配的編碼器為角度編碼器或直線光柵尺,它們是全閉環(huán)編碼器。需要經(jīng)過減速裝置的伺服電機,其所配的編碼器是半閉環(huán)編碼器,由于減速機構(gòu)的加工精度、安裝精度、齒隙、使用磨損、溫度環(huán)境帶來的變化,如需要有更高的精度,需要再配直線光柵尺,或者低速端加裝多圈絕對值編碼器(要玩這個可以找@Q。) ,構(gòu)成全閉環(huán)(或類全閉環(huán))編碼器。另外在多電機協(xié)調(diào)同步控制時,有各個電機全閉環(huán)編碼器的同步對比,才能夠確保操作同步的可靠性。
6,內(nèi)置電子多圈計數(shù)器功能:在加有減速機的半閉環(huán)情況下,為省去加裝全閉環(huán)編碼器,而利用伺服尾部編碼器的旋轉(zhuǎn)圈數(shù)計數(shù)器和編碼器的角度位置,來推算出減速機輸出端(低速端)的定位位置。定位精度有限,受制于減速裝置精度、齒隙與環(huán)境溫度等,以及算法等等多重因素。
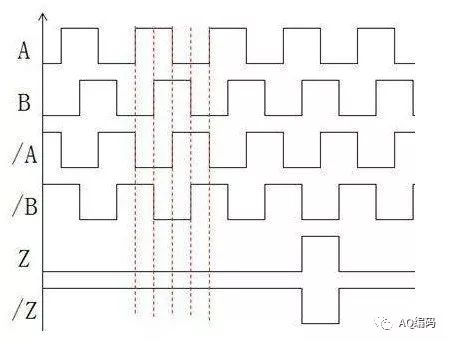
綜合上述伺服電機編碼器在功能上的要求,目前市場上的常見的伺服編碼器有如下幾種:
1, 2500線方波脈沖ABZ(含反相),和UVW(含反相)的換向信號,其中2500線方波脈沖信號可以經(jīng)過一次四倍頻而達(dá)到實際分辨率10000/360度,是對應(yīng)電機控制的位置與速度環(huán),UVW是對應(yīng)同步伺服電機繞組線圈的位置換向,有4對極、8對極及更多對極等等。這種編碼器的輸出芯線很多,并包含電源兩根線在內(nèi),總共有14芯線。
2,2048線AB相含反相的正余弦信號輸出與單圈周期的CD相含反相的正余弦信號,這都需要伺服控制器接收設(shè)備再給正余弦信號細(xì)分,獲取更高分辨率(AB),以及單圈位置(CD)控制換向。
信號線為A+A-,B+B-,C+C-,D+D-,電源正負(fù)。
3,2048線AB相含反相的正余弦信號,并加數(shù)字串行信號。
例如早期的hiperface1.0,RS485信號+AB正余弦,電機啟動時通過絕對值的信號(RS485)獲取電機轉(zhuǎn)子線圈UVW位置,旋轉(zhuǎn)運行時選用增量的AB正余弦信號,伺服控制器接收正余弦信號后細(xì)分為更高的分辨率(例如細(xì)分10位,2048 X 1024)
或者類似方式的Endat2.1,RS422信號+AB正余弦
或者SSI,RS422信號+AB正余弦
4,上述2的正余弦信號在編碼器內(nèi)部細(xì)分整合為數(shù)字信號,或者3中的兩組信號合并在一組串行數(shù)字信號輸出,提供14位,17位,19位,22位,25位等等數(shù)字信號。例如Endat2.2,Biss,HiperFace,RS485,EtherCat(或其他總線式、以太網(wǎng)式信號),DSL等等。
在上述我們提到的17位~25位(單圈)分辨率的編碼器,都不是指編碼器的精度,而是指編碼器的分辨率,同樣是17位的編碼器,很有可能精度是不一樣的,例如用磁電原理細(xì)分的17位(簡稱磁編17位),其精度不如光學(xué)碼盤17位的精度,即使是磁編也有很多種模式,其精度也相差很大。這是因為這些高位數(shù)分辨率的編碼器內(nèi)部都是依據(jù)原始信號正余弦信號的細(xì)分獲得的高分辨率,編碼器信號精度取決于編碼器原始信號獲得的方式、信號品質(zhì)與系統(tǒng)精度,以及細(xì)分與補償帶來的電子誤差。
-
機器人
+關(guān)注
關(guān)注
211文章
28418瀏覽量
207084 -
伺服電機
+關(guān)注
關(guān)注
85文章
2048瀏覽量
57861 -
驅(qū)動電流
+關(guān)注
關(guān)注
0文章
83瀏覽量
16048 -
伺服編碼器
+關(guān)注
關(guān)注
5文章
15瀏覽量
3101
發(fā)布評論請先 登錄
相關(guān)推薦
伺服電機編碼器原理(伺服電機編碼器幾根線以及接線圖)
伺服電機自帶編碼器為什么還要外加編碼器?
伺服電機編碼器維修
伺服電機編碼器原理_伺服電機編碼器種類
伺服電機編碼器基礎(chǔ)簡介
伺服電機編碼器基礎(chǔ)簡介
伺服電機編碼器基礎(chǔ)簡介
伺服電機編碼器分類






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論