") foc電機(jī)控制需要幾個(gè)pwm foc控制算法介紹
foc電機(jī)控制需要幾個(gè)pwm foc控制算法介紹
foc電機(jī)控制需要幾個(gè)pwm
FOC(Field-Oriented Control)電機(jī)控制需要使用兩個(gè)PWM信號來控制電機(jī),具體分為一般PWM和擴(kuò)展PWM兩種。
一般PWM用于控制電機(jī)的直流母線電壓,其輸出頻率一般為幾千赫茲,可以有效地抑制電機(jī)的噪聲和震動(dòng)。通過PWM的占空比來調(diào)節(jié)直流電壓,從而實(shí)現(xiàn)對電機(jī)的調(diào)速和調(diào)轉(zhuǎn)矩。一般PWM一般由開發(fā)板或者控制芯片的內(nèi)置模塊實(shí)現(xiàn)。
擴(kuò)展PWM用于控制電機(jī)的電流,其輸出頻率的設(shè)置一般要遠(yuǎn)遠(yuǎn)低于一般PWM的頻率,以保證電路的穩(wěn)定性和控制精度。擴(kuò)展PWM的任務(wù)是將控制算法的電流控制命令轉(zhuǎn)換為電機(jī)的相電流,從而實(shí)現(xiàn)對電機(jī)的轉(zhuǎn)矩和速度控制。在FOC控制中,擴(kuò)展PWM一般需要由開發(fā)者根據(jù)自身電機(jī)參數(shù)和控制算法來實(shí)現(xiàn)。
因此,F(xiàn)OC控制需要使用一般PWM和擴(kuò)展PWM兩種PWM信號來控制電機(jī),其中一般PWM用于控制電機(jī)直流電壓,擴(kuò)展PWM則用于控制電機(jī)的電流。控制PWM的頻率和占空比也需要根據(jù)具體的電機(jī)控制需求和硬件條件來進(jìn)行調(diào)節(jié)。
foc控制算法
FOC(Field-Oriented Control)是一種高級的電機(jī)控制算法,其基本思路是將電機(jī)的控制問題轉(zhuǎn)化為控制電機(jī)電流矢量,從而實(shí)現(xiàn)對電機(jī)的轉(zhuǎn)矩和速度控制。
FOC的算法主要包括以下幾個(gè)部分:
1. 電機(jī)模型:對電機(jī)進(jìn)行建模,將電機(jī)轉(zhuǎn)矩和電流之間的關(guān)系表示成一個(gè)數(shù)學(xué)模型,一般來說可以采用dq坐標(biāo)系進(jìn)行描述。
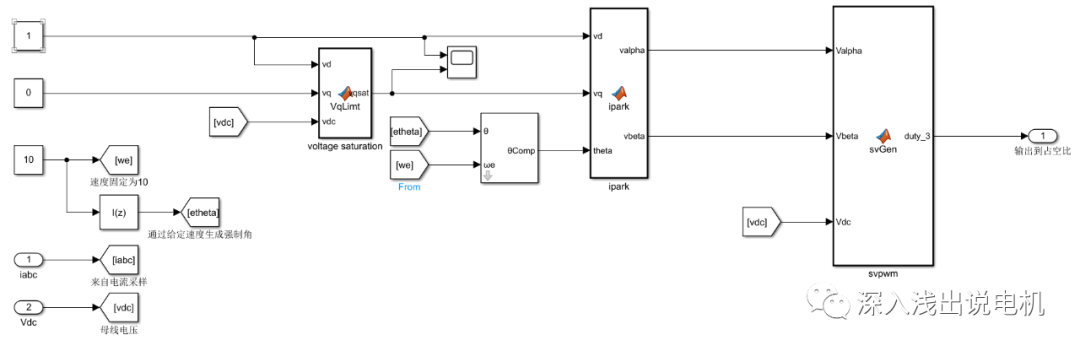
2. 空間矢量調(diào)制:基于電機(jī)模型,采用空間矢量調(diào)制的方法將電壓指令轉(zhuǎn)化為具體的PWM控制信號,從而實(shí)現(xiàn)對電機(jī)的轉(zhuǎn)矩和速度控制。
3. 轉(zhuǎn)矩控制:FOC的目標(biāo)是控制電機(jī)的轉(zhuǎn)矩和速度,因此需要對電機(jī)的轉(zhuǎn)矩進(jìn)行控制。基于電機(jī)模型,控制電流矢量在dq坐標(biāo)系中的分量來實(shí)現(xiàn)轉(zhuǎn)矩控制。
4. 位置控制:在FOC中,控制電機(jī)的位置和轉(zhuǎn)矩是同等重要的,需要對電機(jī)位置進(jìn)行精確控制。通常使用PID控制來實(shí)現(xiàn)電機(jī)位置控制。
FOC算法的優(yōu)點(diǎn)是具有響應(yīng)速度快、開環(huán)穩(wěn)定性高、能耗低等特點(diǎn),適用于需要高精度電機(jī)控制的應(yīng)用場景。同時(shí),也需要對FOC算法的參數(shù)進(jìn)行適當(dāng)調(diào)整,以滿足不同電機(jī)的工作需求。
編輯:黃飛
-
PWM
+關(guān)注
關(guān)注
114文章
5190瀏覽量
214082 -
控制芯片
+關(guān)注
關(guān)注
2文章
510瀏覽量
39331 -
控制電機(jī)
+關(guān)注
關(guān)注
0文章
240瀏覽量
18146
發(fā)布評論請先 登錄
相關(guān)推薦
如何理解foc控制 伺服電機(jī)有foc控制嗎

必學(xué)的BLDC電機(jī)控制算法——FOC簡述
【硬件技術(shù)】為什么電機(jī)FOC控制技術(shù)越來越流行?
【硬聲推薦】電機(jī)FOC控制視頻合集
foc電機(jī)控制算法的調(diào)試經(jīng)驗(yàn)
FOC電機(jī)算法設(shè)計(jì)基礎(chǔ)知識
什么是foc控制 foc控制電機(jī)增加負(fù)載時(shí)抖動(dòng)
電機(jī)控制--FOC的優(yōu)勢

foc對單片機(jī)要求 foc控制優(yōu)勢
如何理解foc控制 伺服電機(jī)有foc控制嗎
【技術(shù)干貨】為什么電機(jī)FOC控制越來越流行?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論