") MAXIEYE面向行業(yè)正式發(fā)布全新單視覺L2解決方案牧童MonoToGo
MAXIEYE面向行業(yè)正式發(fā)布全新單視覺L2解決方案牧童MonoToGo
5 月 24 日,MAXIEYE 面向行業(yè)正式發(fā)布全新單視覺 L2 解決方案牧童 MonoToGo。
主要亮點(diǎn)是支持 C-NCAP 主動(dòng)安全五星 + 評(píng)分,E-NCAP 主動(dòng)安全五星評(píng)分,數(shù)據(jù)閉環(huán)全場(chǎng)景復(fù)現(xiàn),視頻輸出集成復(fù)用等,致力于以功能加成和成本下探雙輪驅(qū)動(dòng),刷新 L2 產(chǎn)品定義,助力智能駕駛系統(tǒng)規(guī)模化量產(chǎn)。
從這段官方的信息中,我們可以概括出幾個(gè)核心關(guān)鍵詞:?jiǎn)我曈X,安全,數(shù)據(jù)閉環(huán),功能加成,成本,規(guī)模化量產(chǎn)。
一句話概括就是:這套單視覺 L2 智駕解決方案成本低,又安全,功能多,還支持向高階輔助駕駛迭代,各大廠商都用得起。
正如 MAXIEYE 所說,這是一套讓客戶愿意用,用得起的單視覺 L2 解決方案。
那問題來了,市面上做自動(dòng)駕駛技術(shù)供應(yīng)商的公司不止一家,如 Mobileye、華為、毫末出行、知行科技 Momenta、Minieye、大疆等都是豪強(qiáng),為什么偏偏 MAXIEYE 搞個(gè)單視覺的 L2 都這么出圈,難道其他家做不出來?
還有諸如成本、安全、功能多、規(guī)模化量產(chǎn)等都是各大車企和智駕供應(yīng)商宣傳的主打詞匯,消費(fèi)者早就聽膩了,結(jié)果也是一言難盡,不了了之。
下面聊聊為什么風(fēng)評(píng)不好的單視覺加上 L2 就能讓 MAXIEYE 火出圈。
01
自動(dòng)駕駛是個(gè)吞金獸
自動(dòng)駕駛技術(shù)是新能源汽車的核心早已是業(yè)內(nèi)共識(shí),馬斯克也說了,以后特斯拉靠 FSD(完全自動(dòng)駕駛)賺錢,車不賺錢都行。
但這條路走到今天卻是一波三折。
2022 年,全球自動(dòng)駕駛行業(yè)剛經(jīng)歷寒冬,裁員、倒閉、部門關(guān)裁撤,福特投資的自動(dòng)駕駛公司 Argo AI 宣布失敗,Aurora 股價(jià)大跌,市值縮水超過 9 成,就連大名鼎鼎的行業(yè)頭部公司 Mobileye 估值也從 500 億美元縮水至 170 億美元。
資本市場(chǎng)開始對(duì)當(dāng)初投資自動(dòng)駕駛的熱情進(jìn)行泄火,因?yàn)樗麄円呀?jīng)明白了,自動(dòng)駕駛技術(shù)不可能一步到位,應(yīng)該走漸進(jìn)式路線。
比如一步到位的代表性企業(yè) Waymo 估值已經(jīng)從 1800 億美元縮水至 300 億美元,百度創(chuàng)始人李彥宏也改口要走漸進(jìn)式路線都證明這一點(diǎn),導(dǎo)致這種現(xiàn)象背后的核心原因有兩個(gè):成本和技術(shù)。
先說成本
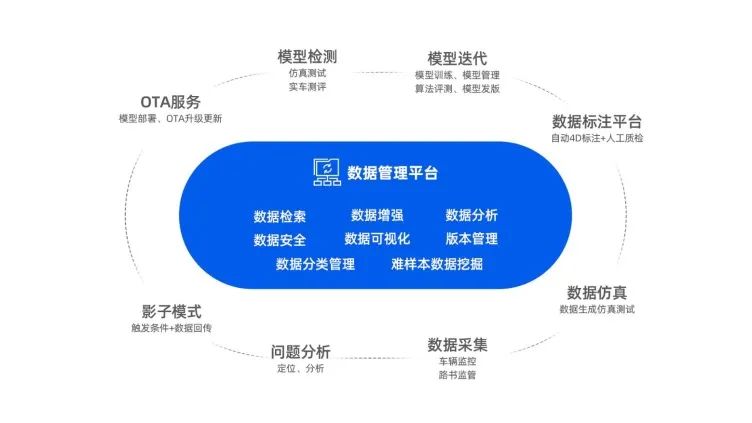
先介紹一下一個(gè)自動(dòng)駕駛項(xiàng)目大概的研發(fā)流程,主要包括:
前期的數(shù)據(jù)采集、數(shù)據(jù)導(dǎo)入、處理標(biāo)注分類等;
中期的自動(dòng)駕駛算法開發(fā)訓(xùn)練、仿真測(cè)試;
后期的算法布置、實(shí)況測(cè)試、算法迭代等工作。
有業(yè)內(nèi)人士表示,像這樣一個(gè)自動(dòng)駕駛項(xiàng)目整個(gè)研發(fā)周期大概需要五年,也就是五年時(shí)間內(nèi),企業(yè)必須不斷投入人物物力財(cái)力,而且期間沒有任何商業(yè)回報(bào),更不知道最終研發(fā)出來的結(jié)果能否被市場(chǎng)接受。
這還只是初期理論預(yù)算,根據(jù)現(xiàn)在各大車企的研發(fā)經(jīng)驗(yàn)可知,在實(shí)際研發(fā)過程中還會(huì)遇到一系列成本失控問題,其中典型代表便是芯片及傳感器成本、數(shù)據(jù)流通成本、數(shù)據(jù)存儲(chǔ)成本和研發(fā)成本。
芯片及傳感器成本
企業(yè)為了車輛能更好的識(shí)別路況,給消費(fèi)者提供良好的智駕體驗(yàn),會(huì)在自家車型上安裝各種傳感器搭配使用,如攝像頭、激光雷達(dá)、毫米波雷達(dá),但是這樣做的后果就是體驗(yàn)上來了,但成本也跟著大幅增加,其中激光雷達(dá)是大頭,加起來動(dòng)輒就是數(shù)萬元的成本,最終價(jià)格便會(huì)傳導(dǎo)至車型售價(jià)上。
另一個(gè)便是 AI 芯片,它是算法訓(xùn)練的硬件平臺(tái),性能越先進(jìn)的 AI 芯片,對(duì)算法訓(xùn)練的效率越高,比如業(yè)內(nèi)大火的英偉達(dá) AI 芯片 A100,可以讓 AI 訓(xùn)練速度提升 20 倍,現(xiàn)在單價(jià)已經(jīng)被炒到 1 萬美元,對(duì)于中國廠商,本就高昂的價(jià)格無形之間又增加了不必要的成本。
數(shù)據(jù)流通成本
為了盡可能的收集高質(zhì)量的數(shù)據(jù)訓(xùn)練算法模型,自動(dòng)駕駛企業(yè)會(huì)使用各種傳感器,比如攝像頭、激光雷達(dá)、毫米波雷達(dá)等,而且需要對(duì)這些不同類型的數(shù)據(jù)進(jìn)行大量 AI 標(biāo)注訓(xùn)練,這就會(huì)產(chǎn)生大量的人力成本。
正如上文提到,自動(dòng)駕駛開發(fā)流程包括數(shù)據(jù)采集、數(shù)據(jù)導(dǎo)入、預(yù)處理、訓(xùn)練、仿真等多個(gè)階段,每個(gè)階段需要的數(shù)據(jù)類型都不同,處理方式也不同,為了避免混亂和提高效率,行業(yè)內(nèi)的普遍做法就是每個(gè)階段的數(shù)據(jù)都是單獨(dú)存儲(chǔ),但這樣做不僅沒能顯著提高效率,反而會(huì)造成大量資源內(nèi)耗。
因?yàn)殚_發(fā)人員需要在不同階段,在不同的存儲(chǔ)器之間來回調(diào)用、回存數(shù)據(jù),有可能還要跨部分寫作,就會(huì)導(dǎo)致大量時(shí)間被浪費(fèi),降低開發(fā)效率,不要小看每次微小的時(shí)間成本,長(zhǎng)時(shí)間累加在一起效率慢的嚇人,小編以前做過開發(fā)工作,對(duì)此深有體會(huì)。
數(shù)據(jù)存儲(chǔ)成本
自動(dòng)駕駛的核心是算法模型,想要迭代更強(qiáng)的算法模型,就需要海量的高質(zhì)量數(shù)據(jù),因此各大企業(yè)每天都會(huì)產(chǎn)生大量數(shù)據(jù),尤其是自己開發(fā)自動(dòng)駕駛技術(shù)的車企,每一輛車每天都會(huì)產(chǎn)出海量數(shù)據(jù),不管有用沒用都要先存儲(chǔ)下來,只是一輛車的數(shù)據(jù)就是以 TB 為單位,數(shù)十百萬輛車加起來的數(shù)據(jù)會(huì)有多么龐大。
而且現(xiàn)在各大車企都在內(nèi)卷自動(dòng)駕駛,市場(chǎng)供需失衡,存儲(chǔ)器價(jià)格也是一路走高,可想而知背后的存儲(chǔ)成本有多么巨大。
根據(jù) 2016 年英特爾的估計(jì),每臺(tái)無人車每天將產(chǎn)生 4000 GB 的數(shù)據(jù),按照亞馬遜目前的收費(fèi)標(biāo)準(zhǔn),存儲(chǔ)一年的成本約為 35 萬美元(折合人民幣約為 244 萬元)。
技術(shù)研發(fā)成本
自動(dòng)駕駛的研發(fā)鏈條很長(zhǎng),需要的技術(shù)也是多種多樣,比如各種傳感器算法、圖像解析、地圖處理、激光雷達(dá)點(diǎn)云、視頻編碼、車載系統(tǒng)、大數(shù)據(jù)處理、芯片技術(shù)等,需要跨學(xué)科、跨領(lǐng)域合作開發(fā)。
新能源汽車是計(jì)算機(jī)和半導(dǎo)體技術(shù)對(duì)傳統(tǒng)汽車的一次技術(shù)變革,因此很多技術(shù)已經(jīng)超出傳統(tǒng)車企的業(yè)務(wù)范疇,這就需要車企重新構(gòu)建新的研發(fā)體系,許多新技術(shù)需要招聘大量精英人才,都會(huì)造成巨大的成本暴漲。
總結(jié)起來就是,一開始行業(yè)都低估了開發(fā)自動(dòng)駕駛技術(shù)的難度,導(dǎo)致成本失控,一步到位式的路線不可取,從商業(yè)角度看,漸進(jìn)式路線才符合各大車企和供應(yīng)商的利益,因此業(yè)內(nèi)逐漸形成一個(gè)共識(shí),先做好 L2 輔助駕駛,然后逐步迭代至更高級(jí)。
02
讓人又愛又恨的單視覺
雖然各大廠商決定把目標(biāo)定在 L2,但自動(dòng)駕駛基于不同的感知元件,技術(shù)路線也不同,大致可分為兩派,一是激光雷達(dá),二是純視覺。
由于激光雷達(dá)可通過點(diǎn)云獲得對(duì)應(yīng)位置豐富的三維信息,相比其他傳感器有明顯優(yōu)勢(shì),因此備受車企推崇,如中國各大車企基本都搭載了激光雷達(dá),而且一輛車上還不止一顆,但劣勢(shì)就在于成本太高。
根據(jù)公開信息顯示,2022 年,國內(nèi)激光雷達(dá)價(jià)格基本在 1000 美元左右。據(jù)開源證券分析稱,目前單顆激光雷達(dá)的成本最高仍有 1 萬元,從市面上的車型可以看出,搭載激光雷達(dá)的車型價(jià)格都居高不下。
因此,各大車企紛紛將關(guān)注點(diǎn)轉(zhuǎn)移到了另一個(gè)傳感器身上,攝像頭。
攝像頭的成本優(yōu)勢(shì)非常明顯,目前一顆單目攝像頭的價(jià)格只有 150 元左右,雙目也就 200 元左右,只有激光雷達(dá)成本的五分之一。
但攝像頭的劣勢(shì)同樣非常明顯,比如市面上單目視覺方案,其對(duì)物體測(cè)距誤差很大,需要毫米波雷達(dá)或激光雷達(dá)數(shù)據(jù)融合才能消除誤差,而且只能獲取二維平面信息,且和人眼一樣,受到環(huán)境因素影響很大,導(dǎo)致很多時(shí)候會(huì)識(shí)別錯(cuò)誤。
比如可能會(huì)把白色物體誤判為天空,把隧道前的欄桿誤認(rèn)為卡車尾部等,或者干脆不識(shí)別。
所以搭載視覺智駕方案的車型體驗(yàn)基本都不好,最典型的問題就是 AEB 誤觸率暴增,所謂 AEB 就是汽車緊急主動(dòng)剎車系統(tǒng),如果智駕系統(tǒng)判斷遇到緊急情況,汽車便會(huì)緊急剎車。
因此目前市面上的單視覺方案汽車會(huì)出現(xiàn)很多無緣無故的緊急剎車,也就是網(wǎng)上說的幽靈剎車,更嚴(yán)重的直接撞,大大降低駕駛體驗(yàn),還會(huì)大幅增加事故風(fēng)險(xiǎn),安全性堪憂,讓主機(jī)廠又愛又恨。
綜上所述,激光雷達(dá)優(yōu)勢(shì)多但成本高,視覺攝像頭成本低但體驗(yàn)差,各大車企既想要單視覺攝像頭的成本,又想要良好的 L2 智駕體驗(yàn),就沒個(gè)廠家能實(shí)現(xiàn)嗎。
03
牧童 MonoToGo 單視覺 L2 新方案
上文提到,單視覺 L2 的問題在于 AEB 誤觸率,核心原因在于樣本庫中沒有足夠豐富的樣本作為比對(duì),針對(duì)此情況,牧童建立了一整套數(shù)據(jù)回傳機(jī)制,據(jù)介紹,在 1R1V 和單 V 方案市場(chǎng),MAXIEYE 是唯一一家具備數(shù)據(jù)回傳能力的公司。
也就是說,目前市面上其他的單 V 方案和 1R1V 方案供應(yīng)商并不具備數(shù)據(jù)回傳能力,不能有效的迭代算法,識(shí)別目標(biāo)。
為什么數(shù)據(jù)回傳機(jī)制這么重要?
這里要解釋一下單視覺方案的識(shí)別物體的過程,當(dāng)遇到障礙物時(shí),車輛會(huì)先通過樣本庫中的樣本與攝像頭看到的圖像進(jìn)行比對(duì),如果能夠識(shí)別,才會(huì)根據(jù)圖像大小計(jì)算與車輛的距離,接著進(jìn)行后續(xù)判斷。
換言之,如果車輛不能先識(shí)別前方物體,那后面也計(jì)算不出來車輛與障礙物的距離,結(jié)果就是車輛直接撞上去,如果是識(shí)別錯(cuò)了,就會(huì)出現(xiàn)幽靈剎車。
牧童的單視覺 L2 方案可以通過數(shù)據(jù)回傳機(jī)制把由于缺少毫米波雷達(dá)校驗(yàn)所產(chǎn)生的 AEB 誤觸數(shù)據(jù)全部回傳回來,用于之后的數(shù)據(jù)訓(xùn)練和算法迭代。
除了數(shù)據(jù)回傳機(jī)制,MAXIEYE 還設(shè)計(jì)了算法冗余,通過多種不同的算法對(duì)目標(biāo)進(jìn)行檢測(cè),不同的算法的原理和檢測(cè)特征完全不同,可以相互校驗(yàn)。
比如對(duì)一個(gè)行人進(jìn)行監(jiān)測(cè),一套算法檢測(cè)整體輪廓,另一套算法檢測(cè)局部特征,如關(guān)節(jié)、面部等,相互驗(yàn)證得出結(jié)論。

為了訓(xùn)練這套系統(tǒng),MAXI 還要求芯片必須支持 H.264 視頻編碼,因?yàn)樾枰哔|(zhì)量的圖像和視頻錄制,為后續(xù)向高階輔助駕駛提供了迭代空間,這都是市面上同等方案不具備的能力。
04
高階輔助駕駛迭代
一套具備數(shù)據(jù)回傳機(jī)制的單視覺 L2 智駕方案會(huì)有怎樣的想象空間?
車企可以聯(lián)合智駕供應(yīng)商一起針對(duì)某個(gè)具體場(chǎng)景設(shè)計(jì)觸發(fā)機(jī)制,提供基于觸發(fā)機(jī)制的數(shù)據(jù)回傳,還原事發(fā)場(chǎng)景。
比如安全氣囊,可以將安全氣囊起爆前后一段時(shí)間進(jìn)行數(shù)據(jù)回傳,幫助車企優(yōu)化氣囊起爆點(diǎn)設(shè)計(jì)。
由于高階輔助駕駛包括上下匝道、各種路口等,車企還可以針對(duì)各種路口、匝道設(shè)計(jì)觸發(fā)機(jī)制,將過路口、匝道前后一段時(shí)間的視頻進(jìn)行數(shù)據(jù)回傳。
MAXIEYE 還在云端準(zhǔn)備了一套 VSLAM 和地圖重構(gòu)算法,可將單 V 視頻用 VSLAM 的方式創(chuàng)建整個(gè)道路拓?fù)洌梢宰鳛榈貓D真值用來迭代高階輔助駕駛,而市面上其他同類方案都不具備此能力,意味著它們的車都是在放養(yǎng),只會(huì)一直差下去。
寫在最后
從目前行業(yè)發(fā)展看,單視覺 L2 方案是進(jìn)入智能駕駛領(lǐng)域性價(jià)比最高的入場(chǎng)券,而牧童 MonoToGo 單視覺 L2 再次刷新同類方案產(chǎn)品力上限,不僅成本低,而且具備完善的數(shù)據(jù)回傳機(jī)制,擴(kuò)大了 L2 功能邊界,還可以做場(chǎng)景出發(fā),將數(shù)據(jù)回傳支持后續(xù)迭代,為以后高階駕駛打下基礎(chǔ)。
對(duì)于消費(fèi)者,感受到的是功能更多、更安全、更適用,獲得 CNCAP 五星評(píng)分的單視覺 L2 智駕系統(tǒng)的良好體驗(yàn)。
-
智能駕駛
+關(guān)注
關(guān)注
3文章
2572瀏覽量
48847 -
視覺
+關(guān)注
關(guān)注
1文章
147瀏覽量
23992 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13916瀏覽量
166776
原文標(biāo)題:高階輔助駕駛迭代
文章出處:【微信號(hào):nev360,微信公眾號(hào):焉知新能源汽車】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
東軟發(fā)布新一代醫(yī)學(xué)影像解決方案
面向視覺 AI 應(yīng)用的全新 MPU 平臺(tái):瑞薩RZ/V2H MPU
華為發(fā)布IntelligentRAN 2.0解決方案
華為發(fā)布全新Ambient Site解決方案
電路L2電感接上后鋰電會(huì)短路是啥情況
面向熱插拔應(yīng)用的 I2C 解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論