 技術干貨-鳳凰動力為你解析AGV各種驅動配置的優勢對比
技術干貨-鳳凰動力為你解析AGV各種驅動配置的優勢對比

AGV驅動舵輪就選鳳凰動力
蘇州鳳凰動力工業有限公司創立于2005年,是國內較早專業從事AGV/AMR舵輪、電驅動輪總成研發與生產的企業,主要產品包括:臥式驅動輪、臥式舵輪、立式驅動輪、立式舵輪、電轉向輪、差速輪組、重載AGV曲軸腳輪、高精密型腳輪。電驅動輪及舵輪的功率范圍0.2KW~50KW、輪徑范圍150mm~600mm、載重范圍300KG~20000KG,幾乎涵蓋了工業領域各類電驅動移動設備的需求,客戶選型游刃有余,并且還可以滿足客戶個性化的定制需求,為客戶打造專屬化產品。
自創立以來,我公司已經為超過1800家客戶提供了完整的電驅動解決方案,涉及航運碼頭、機場、建筑、鋼鐵、汽車、工業車輛、紡織、機械制造、電子制造等多個行業。取得各種專利60多項,建立起電機、齒輪、驅動控制系統等核心零部件優秀的供應鏈基礎,完成了標準化、模塊化、定制化、集成化、系統化、智能化初步架構,為提供優質的OEM、ODM整體解決方案打下了堅實的基礎。
No.1 差速舵輪驅動
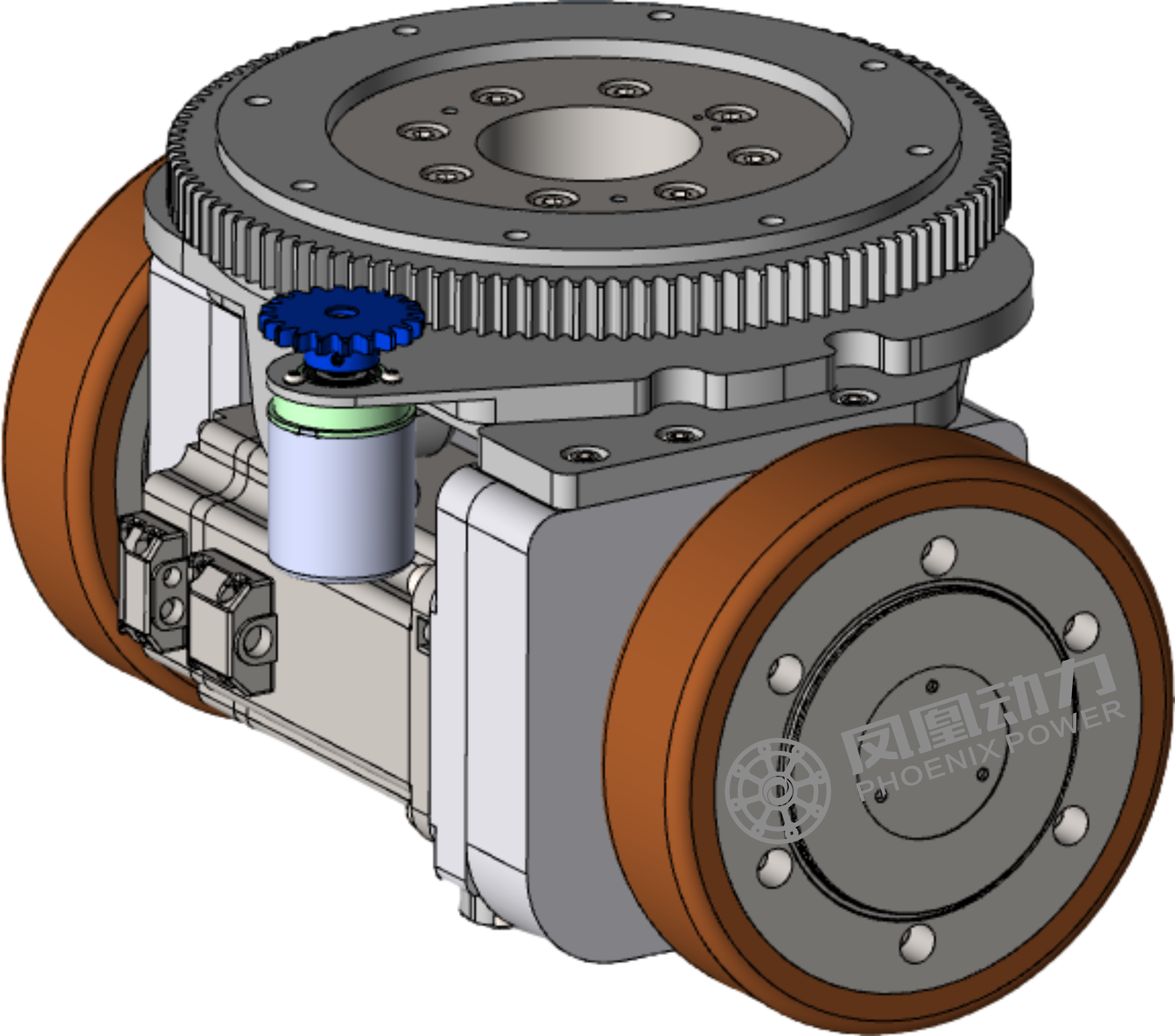
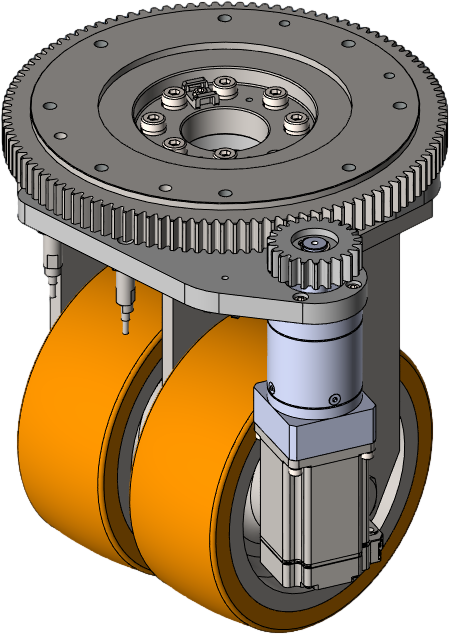
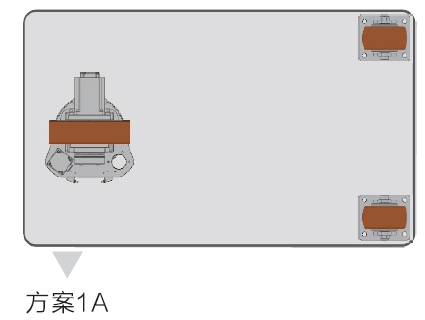
差速舵輪是一個兩輪驅動的系統,而且每個輪子都帶有獨立的執行機構(如直流電動機)。該名稱是基于這樣的事實:機器人的運動矢量是每個獨立車輪運動的總和,通過程序控制兩驅動電機相反轉動或者兩電機速度差,驅動電機的扭轉經過減速箱、包膠輪傳動,使得一套差速舵輪組中,兩驅動輪轉動相反或速度差,從而達到車輛需求的偏轉角度。
與同等負荷的其它類型驅動AGV相比,差速舵輪具有更高的承載能力、牽引力和速度,安裝高度更低,更能輕松自如地在任何方向上進行行駛,而且差速舵輪在原地轉向時與地面是滾動摩擦而非靜摩擦,對地面損傷小,對包膠輪的損傷也小,大大提高了包膠輪的使用壽命。差速舵輪對控制的要求較高:對于差速驅動的機器人來說直線運動可能是比較困難的。因為每個驅動輪是獨立的,一旦它們的旋轉速度不是精確相同的話,機器人就會向一邊偏離。由于電動機輕微的速度差異、馬達驅動系統的摩擦力差異以及輪子與地面的摩擦力差異,實現驅動輪電動機以相同速率旋轉是很困難的。為了保證機器人直線運動,必須頻繁調整電動機的RPM。
No.2臥式舵輪驅動

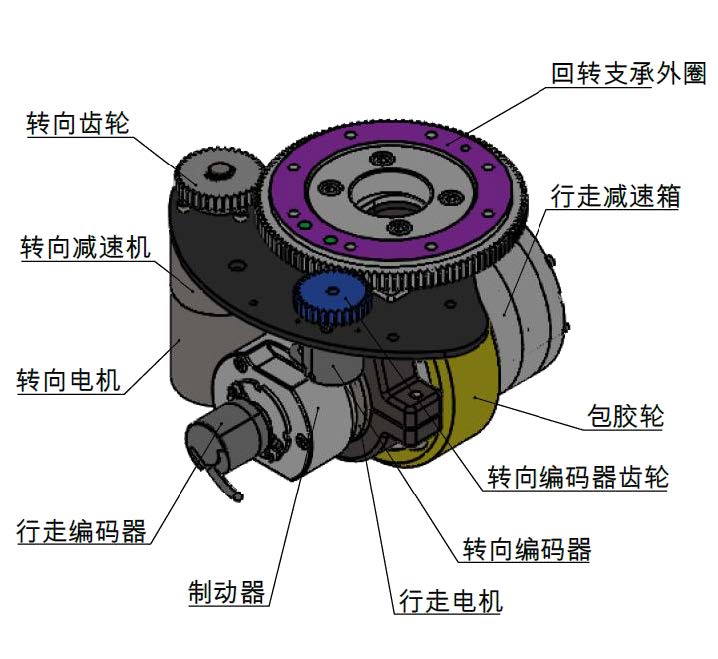
臥式舵輪包含驅動機構及速度反饋、制動機構、轉向機構及其位置反饋、限位裝置等,屬于機電一體化高度集成的產品,通過驅動控制,可以精確控制舵輪的行走速度和方向。配置單舵輪驅動的移動設備,可實現啟停、前進、后退、轉向等路線功能。配置雙舵輪驅動的移動設備,可實現啟停、前進、后退、原地轉向、橫向行駛、任意方向行駛等路線功能。臥式舵輪的驅動電機是橫向安裝,因此整體高度低,有些AGV對高度有要求(例如潛入式的AGV要很矮才能鉆到貨物底下),這時就適合使用臥式舵輪,受出線旋轉的限制,臥式舵輪必須加裝限位裝置以控制轉向角度。
No.3 立式舵輪驅動

立式舵輪包含驅動機構及速度反饋、轉向機構、位置反饋、限位裝置、制動機構等,屬于機電一體化高度集成的產品,通過驅動控制,可以精確控制舵輪的行走速度和方向。
立式舵輪更適用室外應用,其機構特性可實現涉水行走,且具備更好的通過性和爬坡、越障能力。立式舵輪的驅動電機豎著安裝,其整體高度偏高,它的優點是方便將電機隔離起來,在有些場合(例如危險品工廠),要求舵輪電機與外部環境隔離,這時就適合使用立式舵輪,因為它容易做防爆處理。而且因為沒有出線的限制,立式舵輪可以實現360o轉向,較適合狹小空間的AGV作業。
No.4舵輪+電轉向輪驅動
電轉向輪包含行走輪及轉向機構,承擔負載和轉向的功能,AGV小車采用舵輪+電轉向輪驅動配置,由舵輪提供行走驅動力,并通過舵輪及轉向輪轉向實現AGV的全向行駛功能,相比全舵輪配置,滿足同等載荷驅動的條件下,更加符合用戶對成本控制的需要。
No.5麥克納姆輪驅動

麥克納姆輪的輪轂四周上傾斜著安裝能自轉的小棍子,輪轂負責前后轉向,小棍子負責傾斜方向的轉向,它們的合運動方向就是單只輪子的運動方向,一個agv至少配備四個這樣的麥克納姆輪,四個麥克納姆輪的合運動方向就是整個AGV的實際運動方向。控制每個輪子的運動方向,就可以使agv具備任意方向行駛的功能。麥克拉姆輪的控制復雜且價格高昂,結構比普通輪子復雜,易磨損且難以維護,承重部件比較小導致承重力差。
No.6履帶式驅動

履帶式驅動是指AGV使用履帶作為驅動裝置,它的優點是適用于復雜地形,例如:坡度較大、路面不平等等,同時也可以承載更大的重量。但是,由于履帶式驅動的結構比較復雜,所以成本也相對較高。
No.7氣墊式驅動

氣墊式AGV是指AGV使用氣墊作為驅動裝置,它的優點是可以承載更大的重量,同時也可以適用于一些對地面要求較高的場合,例如:無塵車間、醫院等。它的工作原理是利用氣墊將AGV與地面隔開,從而減少摩擦力,使得AGV可以在地面上自由運動,氣墊式AGV可以實現高速運輸,最高速度可達30m/s。氣墊式AGV的缺點是它的氣墊需要一定的壓縮空氣,因此需要額外的設備來提供壓縮空氣,它的造價較高,一次性投入成本較大,此外,由于氣墊式AGV與地面隔離,因此在高速行駛時,氣墊會失去穩定性,從而導致AGV失去控制。
No.8電磁驅動
電磁驅動是一種新型的AGV驅動方式,它通過電磁力直接驅動車輪。電磁驅動的基本原理是通過電磁力建立磁場,并利用磁場力將電動機的轉矩轉變為車輪的轉動力矩,從而驅動車輛行駛。
電磁驅動具有高效、可靠、無噪音、輕量化和維護簡單等優點,已經成為一種非常有前途的AGV驅動方式,但目前因為結構復雜、制造成本高和控制精度要求高,還沒有推廣開來。

審核編輯黃宇
-
驅動
+關注
關注
12文章
1840瀏覽量
85301 -
電磁
+關注
關注
15文章
1134瀏覽量
51827 -
AGV
+關注
關注
27文章
1309瀏覽量
41106
發布評論請先 登錄
相關推薦


你想要的AGV小車減震結構,鳳凰動力都為你梳理清楚了
鳳凰動力告訴你,知道不知道的AGV類型都在這里了
鳳凰動力AGV舵輪大揭秘!
“先機”!叉車AGV如何搶先對手一步獲得競爭優勢!
鳳凰動力為你詳解AGV舵輪的工作原理








 工商網監
工商網監
評論