 如何讓機器鳥實現扇動翅膀的功能?
如何讓機器鳥實現扇動翅膀的功能?
1. 功能說明
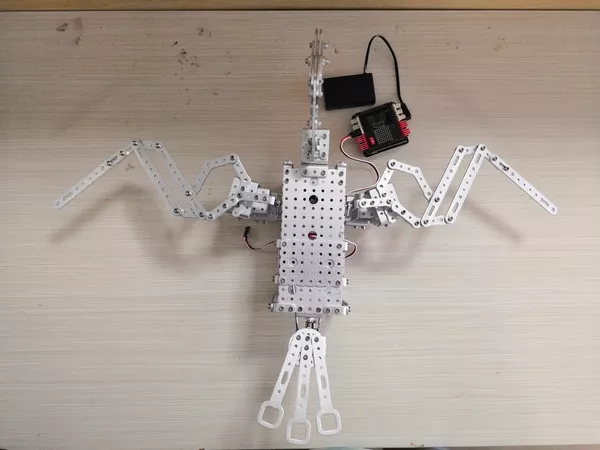
本文示例將實現R329樣機機器鳥扇動翅膀的功能。

2. 結構說明
鳥類的翅膀主要由肩關節、肘關節、腕關節組成,本樣機利用組合機構設計機器鳥的撲翼機構。
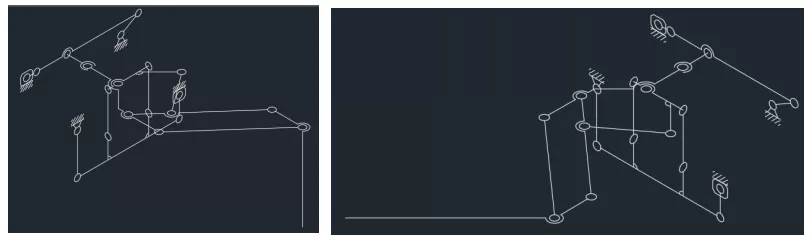 擁有兩個關節的機器鳥撲翼機構結構圖
擁有兩個關節的機器鳥撲翼機構結構圖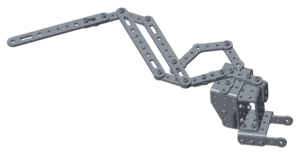 單側翅膀
單側翅膀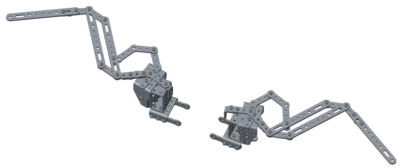 雙翅
雙翅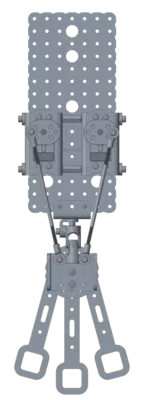 尾部
尾部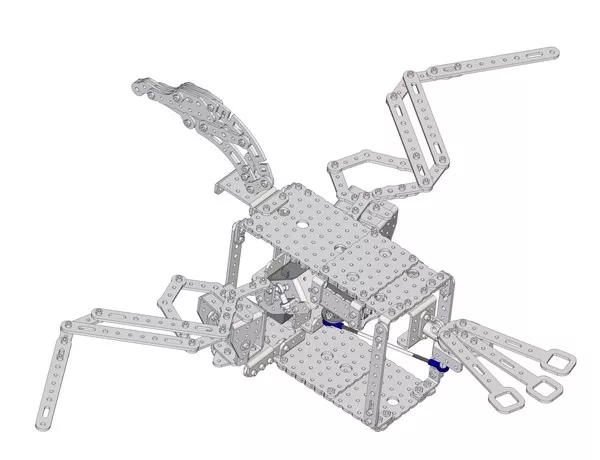 整機
整機3. 電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:
|
主控板 |
|
|
擴展板 |
|
|
電池 |
7.4V鋰電池 |
電路連接:將舵機連接在Bigfish擴展板的D3端口。
4. 功能實現
編程環境:Arduino 1.8.19
下面提供一個機器鳥扇動翅膀的參考例程(Bird_Wing_Fly.ino),例程源代碼及樣機3D文件詳見【 https://www.robotway.com/h-col-231.html 】,實驗效果可參考演示視頻。
/*------------------------------------------------------------------------------------
版權說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 機器譜 2023-05-24 https://www.robotway.com/
------------------------------*/
#include
int _ABVAR_1_Subdivision_number = 0 ;
int _ABVAR_2_Flags = 0 ;
Servo servo_pin_3;
int _ABVAR_3_Servo3_Start = 0 ;
int _ABVAR_4_Servo3_End = 0 ;
int _ABVAR_5_Angle_Of_Each_Time = 0 ;
int _ABVAR_6_value1 = 0 ;
int _ABVAR_7_Angle_Of_Change = 0 ;
int _ABVAR_8_value2 = 0 ;
void Wing_Open();
void Wing_Close();
void setup()
{
servo_pin_3.attach(3);
_ABVAR_1_Subdivision_number = 14 ;
_ABVAR_2_Flags = 0 ;
servo_pin_3.write( 80 );
delay( 1000 );
}
void loop()
{
Wing_Close();
Wing_Open();
}
void Wing_Close()
{
_ABVAR_3_Servo3_Start = 10 ;
_ABVAR_4_Servo3_End = 80 ;
_ABVAR_5_Angle_Of_Each_Time = ( abs( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) / _ABVAR_1_Subdivision_number ) ;
if (( ( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) > ( 1 ) ))
{
_ABVAR_2_Flags = -1 ;
}
else
{
_ABVAR_2_Flags = 1 ;
}
for (_ABVAR_6_value1= 1; _ABVAR_6_value1<= ( ( _ABVAR_1_Subdivision_number + 1 ) ); _ABVAR_6_value1++ )
{
_ABVAR_7_Angle_Of_Change = ( _ABVAR_3_Servo3_Start + ( _ABVAR_5_Angle_Of_Each_Time * _ABVAR_2_Flags ) ) ;
servo_pin_3.write( _ABVAR_7_Angle_Of_Change );
_ABVAR_3_Servo3_Start = _ABVAR_7_Angle_Of_Change ;
delay( 28 );
}
}
void Wing_Open()
{
_ABVAR_3_Servo3_Start = 80 ;
_ABVAR_4_Servo3_End = 10 ;
_ABVAR_5_Angle_Of_Each_Time = ( abs( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) / _ABVAR_1_Subdivision_number ) ;
if (( ( ( _ABVAR_3_Servo3_Start - _ABVAR_4_Servo3_End ) ) > ( 1 ) ))
{
_ABVAR_2_Flags = -1 ;
}
else
{
_ABVAR_2_Flags = 1 ;
}
for (_ABVAR_8_value2= 1; _ABVAR_8_value2<= ( ( _ABVAR_1_Subdivision_number + 1 ) ); _ABVAR_8_value2++ )
{
_ABVAR_7_Angle_Of_Change = ( _ABVAR_3_Servo3_Start + ( _ABVAR_5_Angle_Of_Each_Time * _ABVAR_2_Flags ) ) ;
servo_pin_3.write( _ABVAR_7_Angle_Of_Change );
_ABVAR_3_Servo3_Start = _ABVAR_7_Angle_Of_Change ;
delay( 65 );
}
}
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Arduino
+關注
關注
188文章
6472瀏覽量
187357
發布評論請先 登錄
相關推薦
太好鳥!NW334高傳輸率,150M,這次絕對夠用鳥!
發現了這款NW334,終于讓我峰回路轉,還贏得了同事們的夸贊!人生的際遇總是這么一波三折,不過人生就是把一次旅行嘛,沿途的風景就是無數身邊的瑣碎小事,只有分享鳥,才會感覺到它的價值,才能感受到生活的精彩
發表于 04-01 13:35
循線音樂百靈鳥機器人--鷗鵬機器人制作
循線音樂百靈鳥機器人,完成任務:讓小機器人沿著布置好的軌道行走,播放主人喜歡的音樂喚醒房間的主人。孩子們可以學習如何用簡單的揚聲器發出各種聲音,掌握頻率和聲音之間的關系,并能夠用簡單的
發表于 03-30 17:02
【NUCLEO-F412ZG申請】撲巽機翅膀下升力感應器
申請理由:項目描述:撲巽機翅膀下升力感應通過兩路閉環氣壓壓力傳感器I2C接口和6個主機定時器實現,當翅膀下的升力大機撲巽機重量時,主機改變翅膀形狀保持像
發表于 11-07 16:35
人工神經網絡之深度學習
,制造出可以滑翔的用布料制造的飛翼,從懸崖上飛起來,需要迎面有大風的時候才可以。這里模仿的是鳥類不扇動翅膀的時候在天上滑翔的狀態。把飛翼放在山口風很大的地方也可以飛起來,而且風力越大,飛得越高。飛翼
發表于 07-12 07:03
智能驅鳥器,智能型超聲波驅鳥器,多功能防鳥驅鳥設備
單片機主板設計,安裝方便,供電方面采用了蓄電池和太陽能雙重供電方式,可在偏遠的野外環境中使用。開啟默認起用多普勒雷達探測器和拾音器探測器等功能,當雷達探測到鳥類靠近或拾音器探測到鳥的鳴叫時,系統依據白天
發表于 11-01 11:45
有羽毛有翅膀可折疊 鳥形無人機可逆強風自由飛翔
近日洛桑聯邦理工大學(EPFL)智能系統實驗室的研究人員已經研制出了一種帶翅膀的低耗能無人機,它能在飛行過程中改變翼展長度,還能在狹窄空間中高速飛行。 有羽毛有翅膀可折疊 鳥形無人機可逆強風自由飛翔 早在一億六千萬年前,鳥類就開
發表于 12-27 13:00
?1240次閱讀
區塊鏈技術是否能阻止一只蝴蝶輕輕扇動翅膀就可引起的金融大風暴危機?
在當今全球化越來越緊密聯系的情況下,亞馬遜雨林的一只蝴蝶輕輕扇動翅膀,就有可能引起德克薩斯州的一場龍卷風。目前在全球金融聯系越來越緊密的情況下,任何一個國家金融系統出現問題都可能引起席卷全球的大風
發表于 08-10 09:17
?1617次閱讀
聲控鳥電路
聲控鳥是一種仿真電子工藝品。其外觀為一或兩只彩羽雀鳥停棲于樹枝上之造型。在聲控或手動開關操作下,使雀鳥發出動聽的嗚叫聲。同時,鳥身還會作出擺動、扇翅等動作,非常有趣。其實這些
區塊鏈在某種特征行業中已經非常成熟了
鳥類專家對此百思不得其解,直到美國一位做三維動畫的從業人員,他剛好在《蝙蝠俠歸來》的三維模型,發現了其中一個蝙蝠扇動翅膀細節,為了讓每只蝙蝠飛舞的時候,不至于碰到隔壁蝙蝠的翅膀,保持一定距離,他在其中加入了一種簡單的算法。從而發
發表于 05-15 09:58
?433次閱讀
新型折紙軟體機器人,可以通過折疊翅膀實現空中跳躍或爬行
4月15日消息,韓國首爾國立大學軟機器人研究中心制造了一種機器人,該機器人使用一對翅膀打開飛行并像真正的瓢蟲一樣快速鎖定。
Festo最新仿生機器鳥,可以利用人工羽毛實現飛行
和控制部件、無線電和定位技術、一個無刷電機、兩個伺服裝置、一個電池和變速箱。該機器鳥可以利用人工羽毛飛行。研究人員利用基于無線電的室內GPS與超寬帶技術,以真實鳥類的羽毛為模型,讓機械鳥
扇動萬億級市場的翅膀—傳感器
來源:羅姆半導體社區 01 傳感器是物聯網發展的基石 ? ? 雷軍說過這樣一句名言:“站在風口處,豬也能飛起來,長出一個小翅膀,就能飛得更高”。隨著工信部在6月6號發放5G正式商用牌照,5G的到來





 工商網監
工商網監
評論