") 技術(shù)資訊 I Omnis Marine如何通過(guò)優(yōu)化船舶縱傾,節(jié)省高達(dá) 5%的燃料?
技術(shù)資訊 I Omnis Marine如何通過(guò)優(yōu)化船舶縱傾,節(jié)省高達(dá) 5%的燃料?
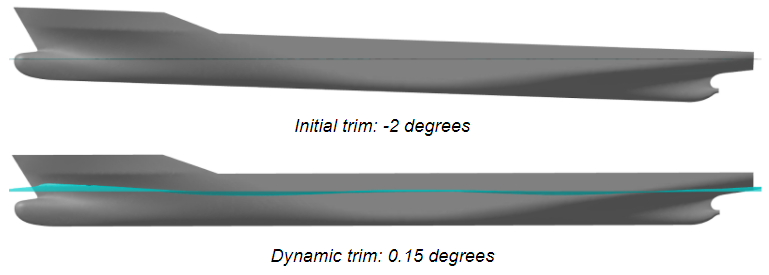
在談到航運(yùn)業(yè)節(jié)能減排時(shí),大家可能不會(huì)想到從縱傾優(yōu)化的角度入手;但這種方法在近期備受關(guān)注,因?yàn)樗_實(shí)可以大大減少燃料消耗。即使航行速度和吃水保持不變,船舶的阻力也會(huì)發(fā)生變化,這取決于縱傾角度。因此,在港口的裝載貨物時(shí),優(yōu)化縱傾角可以確保船舶在航行過(guò)程中的平均阻力達(dá)到最小。
縱傾優(yōu)化的經(jīng)濟(jì)效益
除了助力環(huán)保事業(yè),航運(yùn)公司還可以獲得夢(mèng)寐以求的經(jīng)濟(jì)效益。由于優(yōu)化縱傾角可以減少燃料成本,在對(duì)各種巡航條件進(jìn)行全面的縱傾角優(yōu)化研究的基礎(chǔ)上,建立一個(gè)最佳縱傾角數(shù)據(jù)庫(kù)在財(cái)務(wù)方面意義重大。
任何類(lèi)型和船齡的船舶都可以進(jìn)行縱傾優(yōu)化;當(dāng)然,船舶體積越大,好處就越明顯。對(duì)于某些船舶,如游輪,由于乘客的舒適度和設(shè)施的限制相對(duì)嚴(yán)格,所以縱傾角的調(diào)整相對(duì)不那么靈活。對(duì)于航行時(shí)經(jīng)常需要裝載部分負(fù)荷的船舶,如滾裝船和較小的集裝箱船,優(yōu)化縱傾角可以發(fā)揮最大的效果。在這些情況下,燃料節(jié)省可能高達(dá) 5%。這是一個(gè)相當(dāng)大的數(shù)字:對(duì)于一艘裝載大約 2000 個(gè)標(biāo)準(zhǔn)集裝箱的集裝箱運(yùn)輸船,如果以 22kn 的速度航行,這相當(dāng)于每天節(jié)省約 35 桶石油。
“對(duì)于航行時(shí)經(jīng)常需要裝載部分負(fù)荷的船舶,如滾裝船和較小的集裝箱船,優(yōu)化縱傾角可以節(jié)省高達(dá) 5% 的燃料。對(duì)于一艘裝載大約 2000 個(gè)標(biāo)準(zhǔn)集裝箱的集裝箱運(yùn)輸船,如果以 22kn 的速度航行,這相當(dāng)于每天節(jié)省約 35 桶石油。”
動(dòng)態(tài)縱傾的重要性
在過(guò)去,船舶設(shè)計(jì)是針對(duì)單一的速度和吃水進(jìn)行優(yōu)化的,但大多數(shù)船舶會(huì)經(jīng)歷各種不同的航行條件,需要對(duì)這些參數(shù)進(jìn)行各種更改。如今,借助計(jì)算流體力學(xué) (Computational Fluid Dynamics ,CFD) 這一扭轉(zhuǎn)乾坤的利器,我們可以快速而準(zhǔn)確地生成最佳縱傾和吃水條件矩陣。
需要運(yùn)行數(shù)以百計(jì)的模擬,每種模擬都對(duì)應(yīng)一組初始縱傾、吃水和速度值,從而創(chuàng)建一個(gè)最佳縱傾數(shù)據(jù)庫(kù),同時(shí)不需要進(jìn)行任何模型測(cè)試。計(jì)算時(shí)采用實(shí)船數(shù)據(jù),因?yàn)槭褂每s小版模型不能準(zhǔn)確預(yù)測(cè)湍流,而湍流對(duì)最佳縱傾角度有很大的影響。局部再循環(huán)和水流剝離會(huì)導(dǎo)致模型和實(shí)船的預(yù)測(cè)力出現(xiàn)差異,因?yàn)橹溥@些現(xiàn)象的雷諾數(shù)不能在幾何比例中得到保留。與不包括湍流效應(yīng)的潛在數(shù)據(jù)相比,壁面粗糙度(污垢)的阻力增加效應(yīng)也可以納入 CFD 分析中。因此,對(duì)于船舶在整個(gè)生命周期內(nèi)的阻力,CFD 可以提供更真實(shí)的數(shù)據(jù)。
鑒于結(jié)果的準(zhǔn)確性和一致性,CFD 還能將復(fù)雜流體力學(xué)問(wèn)題的詳細(xì)信息轉(zhuǎn)換為 3D 形式。工作流程幾乎可以完全自動(dòng)化,因?yàn)檐浖乃胁僮鞫伎梢杂媚_本編寫(xiě)。船舶設(shè)計(jì)師只需輸入特定的船舶條件,軟件就能在一個(gè)工作站或 HPC 集群上快速自主地設(shè)置和運(yùn)行所有模擬。
“整個(gè)工作流程幾乎可以完全自動(dòng)化。船舶設(shè)計(jì)師只需輸入特定的船舶條件,軟件就能在一個(gè)工作站或 HPC 集群上快速自主地設(shè)置和運(yùn)行所有模擬。”
Omnis Marine
在實(shí)踐中,Omnis Marine 的 C-Wizard 矩陣模式創(chuàng)建了 n x m x p 的計(jì)算:針對(duì)每個(gè) {吃水 (n),縱傾 (m)} 組合提供一個(gè)速度 (p) 的列表。所有吃水-縱傾組合的位移都保持一致。隨著船舶平移/旋轉(zhuǎn),自由表面的 Z 坐標(biāo)在所有計(jì)算中也保持不變,以確保等距位移條件。此外,用戶(hù)還可以選擇通過(guò)鼓動(dòng)盤(pán)使用真實(shí)螺旋槳性能的公開(kāi)水域數(shù)據(jù),這進(jìn)一步提高了結(jié)果的準(zhǔn)確性和真實(shí)性,同時(shí) CPU 成本較低。
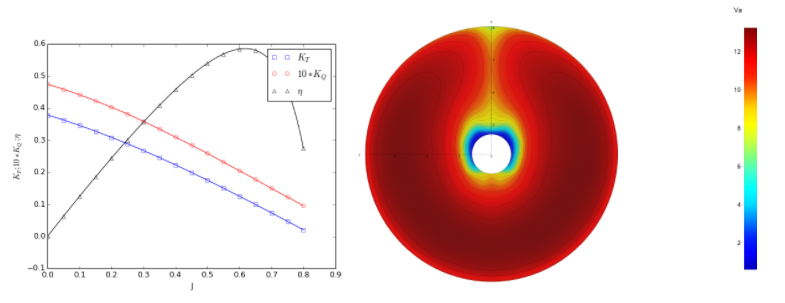
在模擬過(guò)程中,Omnis Marine 可以通過(guò)鼓動(dòng)盤(pán)讀取公開(kāi)水域性能數(shù)據(jù)。
流體求解器計(jì)算出的阻力、力矩和動(dòng)態(tài)縱傾以及下沉量,對(duì)應(yīng)后處理步驟中的每個(gè)組合(吃水、縱傾、速度),會(huì)產(chǎn)生每個(gè)吃水的位移。例如,以下是基于 Omnis Marine 獲得的 CFD 結(jié)果得出的特定船只的優(yōu)化縱傾表格。
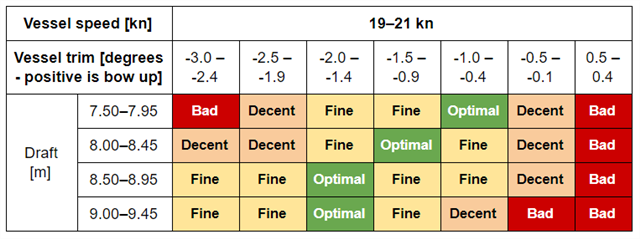
Omnis Marine得出的優(yōu)化縱傾表格
值得注意的是,整個(gè)項(xiàng)目的數(shù)百次計(jì)算都將用同一個(gè)網(wǎng)格來(lái)完成!這種能力大大減少了所需的總計(jì)算時(shí)間,因?yàn)閹缀误w和水域只需要經(jīng)過(guò)一次網(wǎng)格化,同時(shí)還能確保最高的精度。此外,這還避免了創(chuàng)建不同網(wǎng)格所固有的數(shù)值不確定性。這要?dú)w功于 Omnis Marine 獨(dú)特的自適應(yīng)網(wǎng)格細(xì)化 (Adaptive Grid Refinement ,AGR) 技術(shù),該技術(shù)以各向異性、自動(dòng)和動(dòng)態(tài)的方式,在模擬過(guò)程中對(duì)自由表面進(jìn)行所有必要的細(xì)化。
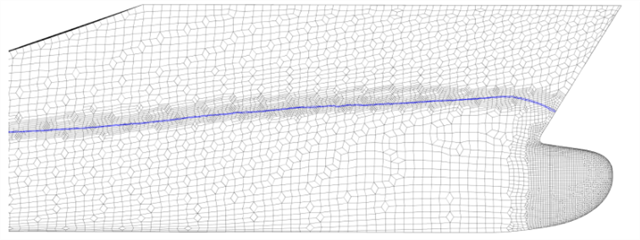
Omnis Marine自適應(yīng)網(wǎng)格細(xì)化技術(shù)在捕捉自由表面方面的作用
結(jié)論
對(duì)于船東來(lái)說(shuō),要減少運(yùn)營(yíng)費(fèi)用,縱傾優(yōu)化是一個(gè)相對(duì)容易的方法。在過(guò)去,可能無(wú)法針對(duì)初始吃水、縱傾角和速度的龐大矩陣獲得準(zhǔn)確的阻力預(yù)測(cè),而現(xiàn)在,CFD 是快速和高精度獲得最佳縱傾角數(shù)據(jù)庫(kù)的首選工具。
Omnis Marine 具有獨(dú)特的功能,如帶有自適應(yīng)網(wǎng)格細(xì)化技術(shù)的單網(wǎng)格方法和使用真實(shí)的公開(kāi)水域推進(jìn)數(shù)據(jù),對(duì)于基于矩陣阻力的應(yīng)用而言,該軟件提供了一套終極 CFD 工具。
-
數(shù)據(jù)庫(kù)
+關(guān)注
關(guān)注
7文章
3839瀏覽量
64542
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
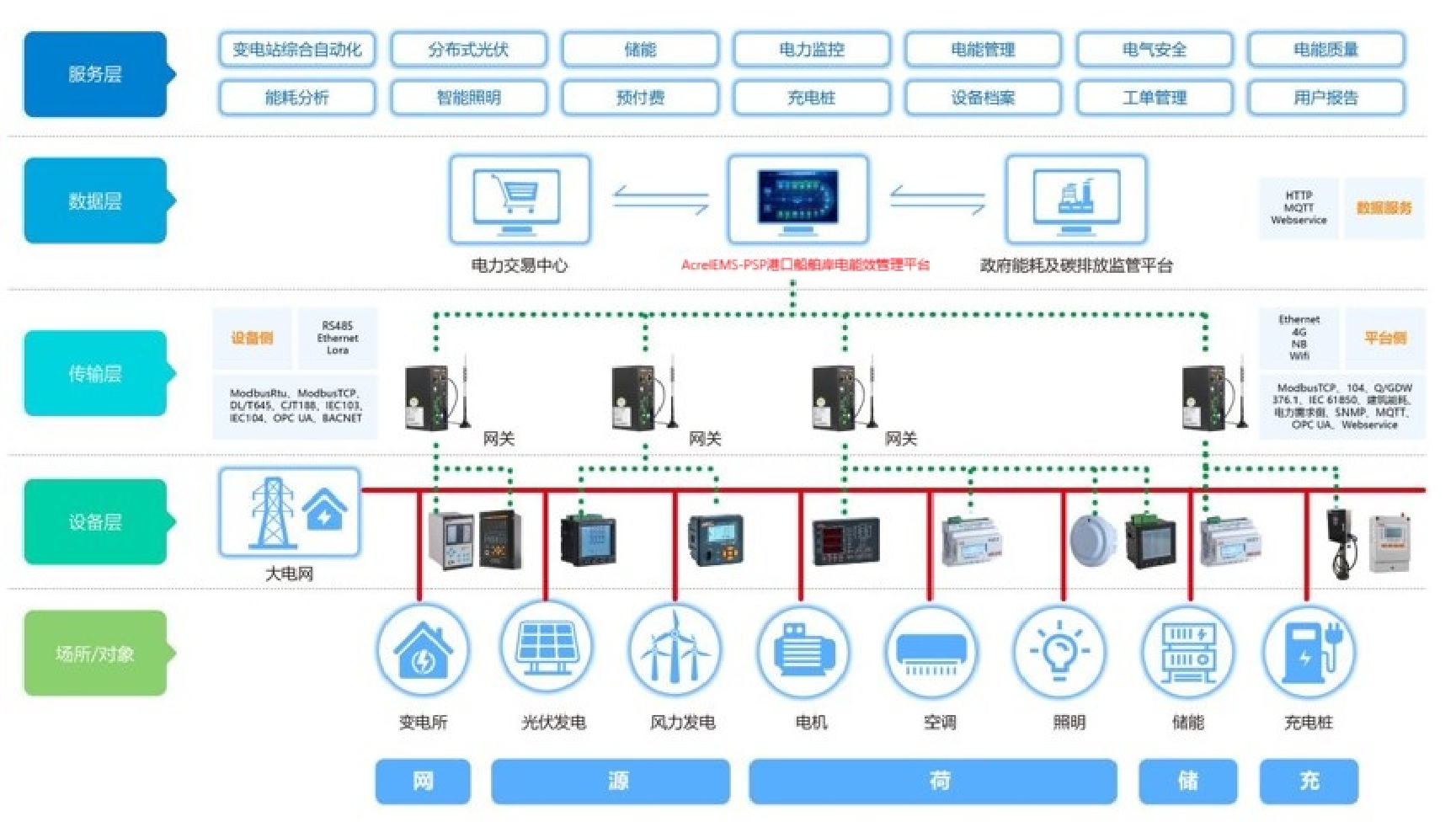
港口船舶岸電綜合能效解決方案-某港聯(lián)用通碼頭泊位改造工程
燃料電池測(cè)試負(fù)載如何進(jìn)行負(fù)載測(cè)試?
燃料電池技術(shù)的環(huán)保優(yōu)勢(shì)
燃料電池的應(yīng)用領(lǐng)域 燃料電池車(chē)的優(yōu)缺點(diǎn)
燃料電池測(cè)試負(fù)載的工作原理是什么?
“無(wú)源感知”實(shí)現(xiàn)船舶備件管理—RFID技術(shù)在船舶領(lǐng)域的應(yīng)用

港口船舶岸電能效管理解決方案
船舶岸電系統(tǒng):蔚藍(lán)海岸的綠色革命先鋒
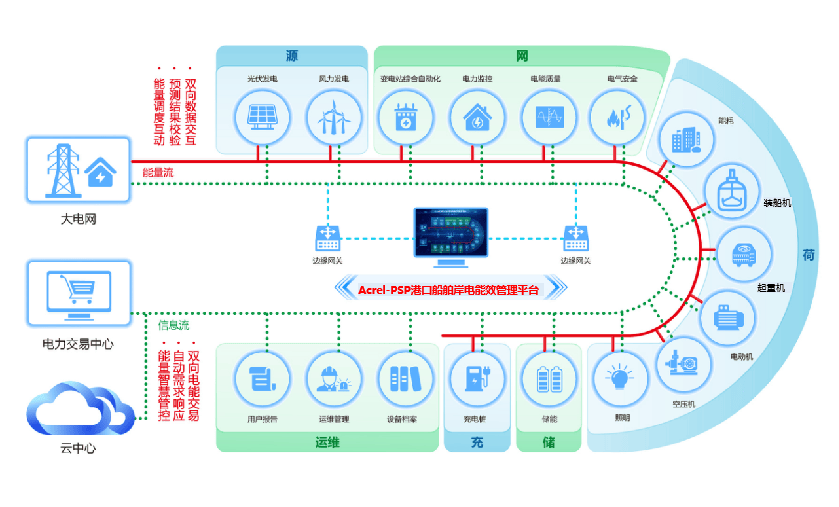
針對(duì)港口船舶岸電場(chǎng)景提供綜合能效的解決方案
EAK零電感水冷制動(dòng)電阻器采用結(jié)晶熱塑性聚合物材料,為船舶應(yīng)用帶來(lái)持久的可靠性

【?嵌入式機(jī)電一體化系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)?閱讀體驗(yàn)】+《智能化技術(shù)在船舶維護(hù)中的應(yīng)用探索》
紅外熱成像技術(shù)助力船舶安全監(jiān)測(cè)

5G技術(shù)領(lǐng)航,上海兆越助力海上船舶信息化全覆蓋

船舶運(yùn)動(dòng)姿態(tài)測(cè)量應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論