") 9軸電子羅盤工作原理,校準(zhǔn)與應(yīng)用
9軸電子羅盤工作原理,校準(zhǔn)與應(yīng)用
1 概述及應(yīng)用
基本介紹
電子羅盤,也叫數(shù)字指南針,是利用地磁場來定北極的一種方法,作為導(dǎo)航儀器或姿態(tài)傳感器已被廣泛應(yīng)用。古代稱為羅經(jīng),現(xiàn)代利用先進(jìn)加工工藝生產(chǎn)的磁阻傳感器為羅盤的數(shù)字化提供了有力的幫助。現(xiàn)在一般由用磁阻傳感器或磁通門等芯片加工而成的電子羅盤。
可應(yīng)用在水平孔和垂直孔測量、水下勘探、飛行器導(dǎo)航、科學(xué)研究、教育培訓(xùn)、建筑物定位、設(shè)備維護(hù)、導(dǎo)航系統(tǒng)等領(lǐng)域。
 電子羅盤
電子羅盤基本原理
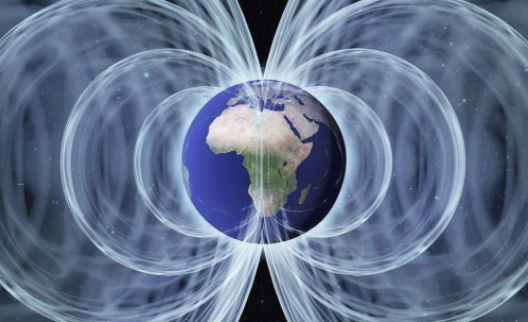
地球的磁場像一個條形磁體一樣由磁南極指向磁北極。在磁極點(diǎn)處磁場和當(dāng)?shù)氐乃矫娲怪保诔嗟来艌龊彤?dāng)?shù)氐乃矫嫫叫校栽诒卑肭虼艌龇较騼A斜指向地面。用來衡量磁感應(yīng)強(qiáng)度大小的單位是Tesla或者Gauss(1Tesla=10000Gauss)。
隨著地理位置的不同,通常地磁場的強(qiáng)度是0.4-0.6 Gauss。需要注意的是,磁北極和地理上的北極并不重合,通常他們之間有11度左右的夾角。
 地磁圖
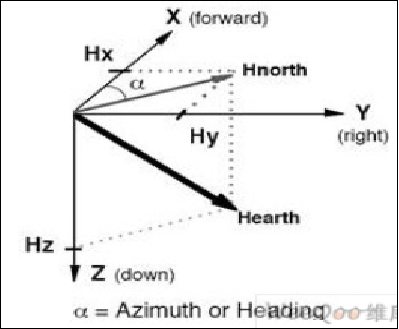
地磁圖因?yàn)榈卮艌鍪且粋€矢量,對于一個固定的地點(diǎn)來說,這個矢量可以被分解為兩個與當(dāng)?shù)厮矫嫫叫械姆至亢鸵粋€與當(dāng)?shù)厮矫娲怪钡姆至俊H绻3蛛娮恿_盤和當(dāng)?shù)氐乃矫嫫叫校敲戳_盤中磁力計(jì)的三個軸就和這三個分量對應(yīng)起來。
實(shí)際上對水平方向的兩個分量來說,他們的矢量和總是指向磁北的。羅盤中的航向角(Azimuth)就是當(dāng)前方向和磁北的夾角。由于羅盤保持水平,如果加入地球磁偏角,只需要用磁力計(jì)水平方向兩軸(通常為X軸和Y軸)的檢測數(shù)據(jù)就可以計(jì)算出航向角。當(dāng)羅盤水平旋轉(zhuǎn)的時候,航向角在0°- 360°之間變化。
 三軸磁力計(jì)
三軸磁力計(jì)應(yīng)用領(lǐng)域
農(nóng)業(yè)機(jī)械,車載裝備,航天航空, 水下勘探,工程機(jī)械,地質(zhì)監(jiān)測等等需要測量方向方位的應(yīng)用。
2 運(yùn)用原理
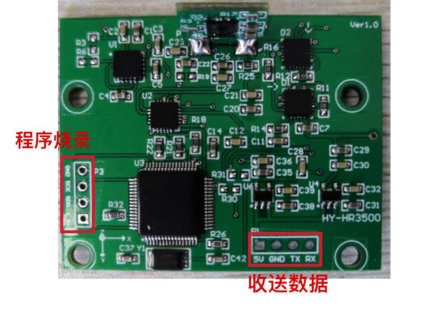
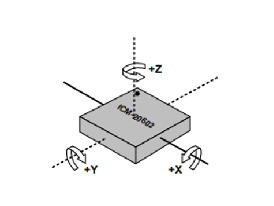
羅盤硬件的主要構(gòu)成分為五部分,一是磁力計(jì)模塊(測量羅盤周圍的磁場),二是加速度計(jì)模塊(測量羅盤的加速度),三是陀螺儀模塊(測量羅盤的角速度),四是MCU模塊(接收信號后進(jìn)行角度計(jì)算,坐標(biāo)轉(zhuǎn)換,系統(tǒng)誤差補(bǔ)償?shù)龋瑥亩贸隽_盤的姿態(tài)參數(shù),并將數(shù)據(jù)輸出到上位機(jī)),五是串口轉(zhuǎn)換模塊(可將信號轉(zhuǎn)換成RS-232接口模式與電腦通訊)。以下對部分硬件及原理進(jìn)行介紹。
1)磁力計(jì)
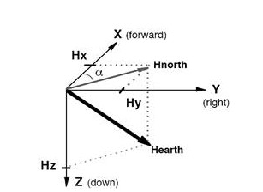
由于地磁場是矢量,在某一地點(diǎn)時,這個矢量可以被分解為兩個與當(dāng)?shù)厮矫嫫叫械姆至亢鸵粋€與當(dāng)?shù)厮矫娲怪钡姆至俊D敲慈绻3至_盤模塊和當(dāng)?shù)氐乃矫嫫叫衅渲械拇帕τ?jì)的三個軸就可以與這三個分量相對應(yīng)。
目前是通過傾角補(bǔ)償來實(shí)現(xiàn)對模塊與水平面平行,進(jìn)而通過補(bǔ)償后數(shù)據(jù)進(jìn)行航向角計(jì)算。
 磁力計(jì)
磁力計(jì)2)加速度計(jì)和陀螺儀
加速度: 加速度可以通過三軸數(shù)據(jù)求出姿態(tài)角,雖然靜態(tài)穩(wěn)定性有優(yōu)勢,但是動態(tài)效果就比較差;
陀螺儀:陀螺儀可以通過角速度積分求出姿態(tài)角,雖然動態(tài)響應(yīng)有優(yōu)勢,但是靜態(tài)穩(wěn)定性差。
所以基于卡爾曼濾波對加速度、陀螺儀進(jìn)行融合計(jì)算,得出最優(yōu)估計(jì)姿態(tài)角對傾角進(jìn)行補(bǔ)償。同時因?yàn)椴捎猛勇輧x和加速度進(jìn)行融合,所以可實(shí)現(xiàn)動態(tài)和靜態(tài)角度的測量,從而實(shí)現(xiàn)羅盤可以滿足動態(tài)和靜態(tài)情況下的使用。
 加速度計(jì)和陀螺儀
加速度計(jì)和陀螺儀3)卡爾曼濾波
卡爾曼濾波(Kalman filtering)是一種利用線性系統(tǒng)狀態(tài)方程,通過系統(tǒng)輸入輸出觀測數(shù)據(jù),對系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法。由于觀測數(shù)據(jù)中包括系統(tǒng)中的噪聲和干擾的影響,所以最優(yōu)估計(jì)也可看作是濾波過程。
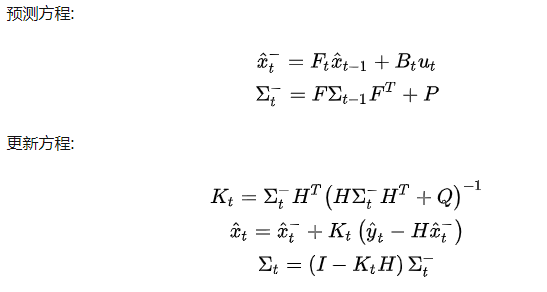 線性方程
線性方程在卡爾曼濾波中假設(shè):
a 其狀態(tài)轉(zhuǎn)移是線性的,因此我們可以直接用矩陣F表示其線性特征。
b 其狀態(tài)和觀測都是高斯分布(實(shí)際生活中一大部分都是高斯分布的,并且高斯分布計(jì)算相對簡單)。
由于假設(shè)b,在多維高斯分布概率密度函數(shù)中,最為重要的兩個量分別為均值和協(xié)方差矩陣 。
因此卡爾曼濾波本質(zhì)就是將預(yù)測方程和觀測方程的高斯分布的概率密度融合得到新的高斯分布的概率密度函數(shù)作為最優(yōu)估計(jì),并不斷迭代。
總結(jié)出以下幾點(diǎn):
① 卡爾曼濾波是一個算法,它適用于線性、離散和有限維系統(tǒng)。每一個有外部變量的自回歸移動平均系統(tǒng)(ARMAX)或可用有理傳遞函數(shù)表示的系統(tǒng)都可以轉(zhuǎn)換成用狀態(tài)空間表示的系統(tǒng),從而能用卡爾曼濾波進(jìn)行計(jì)算。
② 任何一組觀測數(shù)據(jù)都無助于消除x(t)的確定性。增益K(t)也同樣地與觀測數(shù)據(jù)無關(guān)。
③ 當(dāng)觀測數(shù)據(jù)和狀態(tài)聯(lián)合服從高斯分布時用卡爾曼遞歸公式計(jì)算得到的是高斯隨機(jī)變量的條件均值和條件方差,從而卡爾曼濾波公式給出了計(jì)算狀態(tài)的條件概率密度的更新過程線性最小方差估計(jì),也就是最小方差估計(jì)。
卡爾曼濾波的一個典型實(shí)例是從一組有限的,對物體位置的,包含噪聲的觀察序列中預(yù)測出物體的坐標(biāo)位置及速度。在很多工程應(yīng)用(雷達(dá)、計(jì)算機(jī)視覺)中都可以找到它的身影。同時,卡爾曼濾波也是控制理論以及控制系統(tǒng)工程中的一個重要話題。
比如,在雷達(dá)中,人們感興趣的是跟蹤目標(biāo),但目標(biāo)的位置、速度、加速度的測量值往往在任何時候都有噪聲。卡爾曼濾波利用目標(biāo)的動態(tài)信息,設(shè)法去掉噪聲的影響,得到一個關(guān)于目標(biāo)位置的好的估計(jì)。這個估計(jì)可以是對當(dāng)前目標(biāo)位置的估計(jì)(濾波),也可以是對于將來位置的估計(jì)(預(yù)測),也可以是對過去位置的估計(jì)(插值或平滑)。
4)傾斜補(bǔ)償及航偏角計(jì)算
電子羅盤一般通電后在水平面上就可以正常使用。但是更多的時候并不是保持水平的,通常它和水平面都有一個夾角。這個夾角會影響航向角的精度,需要通過加速度傳感器進(jìn)行傾斜補(bǔ)償。具體算法講解我們放到校準(zhǔn)方法部分。
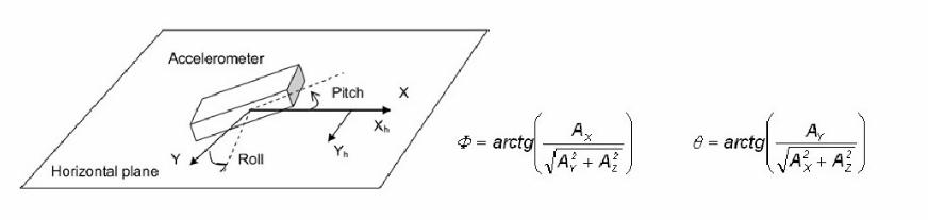 偏航角計(jì)算
偏航角計(jì)算
3 邏輯框架
功能邏輯描述
1)電子羅盤通上電,內(nèi)部就開始運(yùn)行。先是內(nèi)部的磁力計(jì),加速度計(jì),陀螺儀等芯片開始采集數(shù)據(jù),同時讀取校準(zhǔn)保存在掉電保存區(qū)的補(bǔ)償值,將補(bǔ)償值添加入采集的原始數(shù)據(jù)中實(shí)現(xiàn)補(bǔ)償修正功能。
2)補(bǔ)償后的數(shù)據(jù)使用頻域或時域?yàn)V波,濾除雜質(zhì)數(shù)據(jù)。
3)通過卡爾曼濾波融合算法得roll,pitch,yaw數(shù)值。
4)子羅盤開始360°平面校準(zhǔn),把校準(zhǔn)后的值再串口通訊給上位機(jī)。
羅盤硬件框架圖:
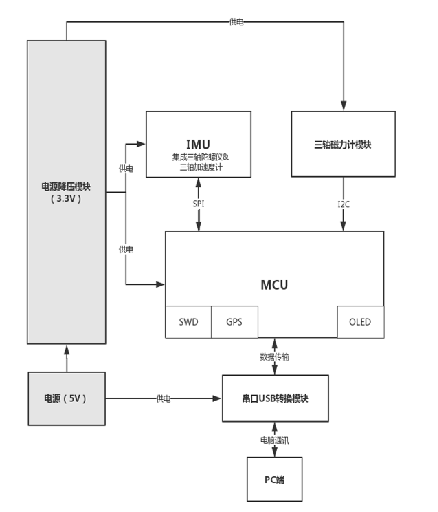 硬件框架圖
硬件框架圖羅盤軟件框架圖:
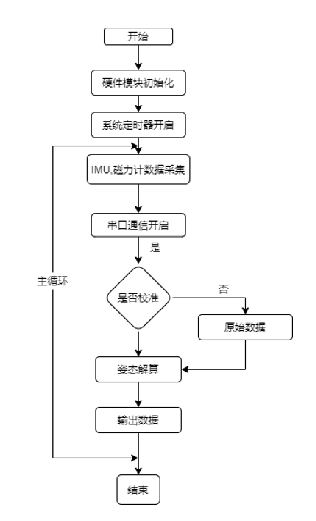 軟件框架圖
軟件框架圖
4 校準(zhǔn)方法
校準(zhǔn)原因
電子羅盤主要是通過感知地球磁場的存在來計(jì)算磁北極的方向。然而由于地球磁場在一般情況下只有微弱的0.5高斯,而一個普通的手機(jī)喇叭當(dāng)相距2厘米時仍會有大約4高斯的磁場,一個手機(jī)在相距2厘米時會大約6高斯的磁場,這一特點(diǎn)使得電子羅盤測量表面地球磁場時很容易受到電子設(shè)備本身的干擾。磁場干擾是指由于具有磁性物質(zhì)或者可以影響局部磁場強(qiáng)度的物質(zhì)存在,使得磁傳感器所放置位置上地球磁場發(fā)生了偏差。
如圖所示,在磁傳感器的XYZ坐標(biāo)系中,綠色的圓表示地球磁場矢量繞Z軸圓周轉(zhuǎn)到過程中在XY平面內(nèi)的投影軌跡,再沒有外界任何磁場干擾的情況下,此軌跡將會是一個標(biāo)準(zhǔn)的以O(shè)(0,0)為中心的圓。當(dāng)存在外界磁干擾的情況時,測量得到的磁場強(qiáng)度矢量α將為該點(diǎn)地球磁場β與干擾磁場γ的矢量和。記作:
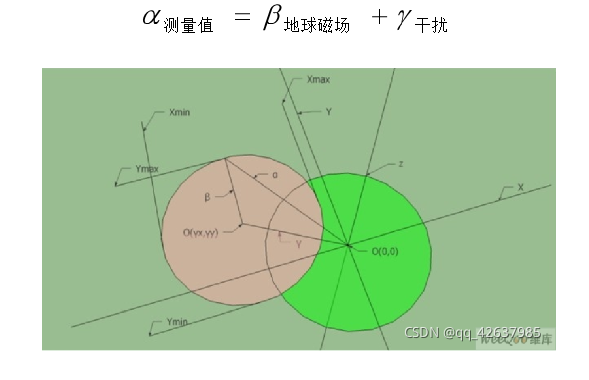 測量值計(jì)算
測量值計(jì)算校準(zhǔn)方法類型
1)平面校準(zhǔn)法
針對XY軸的校準(zhǔn),將電子羅盤在XY平面內(nèi)自轉(zhuǎn),等價于將地球磁場矢量繞著過點(diǎn)O(γx,γy)垂直與XY平面的法線旋轉(zhuǎn),而紅色的圓為磁場矢量在旋轉(zhuǎn)過程中在XY平面內(nèi)投影的軌跡。這可以找到圓心的位置為((Xman+Xmin)/2,(Ymax+Ymin)/2)同樣將設(shè)備在XY平面內(nèi)旋轉(zhuǎn)可以得到地球磁場在XY平面上的軌跡圓,這可以求出三維空間中的磁場干擾矢量γ(γx,γy,γz).
 平面校準(zhǔn)法
平面校準(zhǔn)法
這也是最常用的一種方法,快捷簡便。
2)橢球擬合校準(zhǔn)方法
對于給定平面上的一組樣本點(diǎn),尋找一個橢圓,使其盡可能靠近這些樣本點(diǎn)。也就是說到,將圖像中的一組數(shù)據(jù)以橢圓方程為模型進(jìn)行擬合,使某一橢圓方程盡量滿足這些數(shù)據(jù),并求出該橢圓方程的各個參數(shù)。最后確定的最佳橢圓的中心即是我們要確定的靶心。
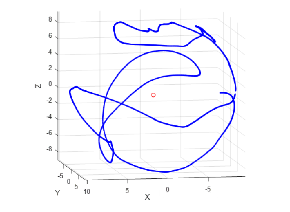 橢球擬合校準(zhǔn)方法
橢球擬合校準(zhǔn)方法 這是另一種可選校準(zhǔn)方法,除此之外其實(shí)還有好多種校準(zhǔn)方法,但是因?yàn)椴┲髦橇τ邢蓿ㄆ鋵?shí)就是太懶了哈哈)這里就不多列舉了,有興趣的朋友可以去自行搜索學(xué)習(xí)。
以下詳細(xì)介紹平面校準(zhǔn)法是如何校準(zhǔn)補(bǔ)償?shù)摹?br />
平面校準(zhǔn)法
如果磁力計(jì)在含有附加的局部磁場的環(huán)境中進(jìn)行操作,磁力計(jì)的輸出做附加的修正將是必要的。 在沒有任何本地磁場的影響下,可以通過旋轉(zhuǎn)設(shè)備360°產(chǎn)生的平面 。
使用方法:修正的輸出可以根據(jù)下面的方法來計(jì)算:
1) 在磁場干擾的條件下進(jìn)行, 數(shù)據(jù)收集設(shè)備被旋轉(zhuǎn)360°。
2)數(shù)據(jù)進(jìn)行分析,以產(chǎn)生偏差的偏移和靈敏度的比例因子,以補(bǔ)償所述干擾。
舉個例子:
從數(shù)據(jù)中發(fā)現(xiàn)的X和Y磁強(qiáng)計(jì)的最大輸出:
X min = -0.284gauss X max = +0.402gauss
Ymin = -0.322gauss Ymax = +0.246gauss
從中可以看出X軸的數(shù)據(jù),X具有更大的反應(yīng),我們設(shè)置其比例系數(shù)為1
X s = 1
再計(jì)算其他比例系數(shù):
( X max - X min )
Y s = ————————
( Y max - Y min )
對于偏置補(bǔ)償:
X b = X s[1/2( X max - X min ) - X max ]
Y b = Y s[1/2( Y max - Y min ) - Y max ]
正確的輸出: X out = X in*X s + X b Y out = Y in*Y s + Y b
5 結(jié)語
好了,電子羅盤的介紹就到這里了,博主能力有限,有不夠詳細(xì)或者說的不對的地方請多多包涵,想更多了解電子羅盤或者對這個傳感器有興趣有需求的話可以加微15002037876,一起交流一下~
-
電子羅盤
+關(guān)注
關(guān)注
1文章
123瀏覽量
23331
發(fā)布評論請先 登錄
相關(guān)推薦
絕緣電阻測試儀的校準(zhǔn)方法 絕緣電阻測試儀的工作原理
FOC電機(jī)的基本工作原理 FOC電機(jī)的優(yōu)缺點(diǎn)對比


PNI電子羅盤-TCM-XB 安裝及測試校準(zhǔn)的簡要說明

磁敏電子雙色液位計(jì)工作原理是什么
推挽驅(qū)動芯片的工作原理是什么
VCO的工作原理是什么
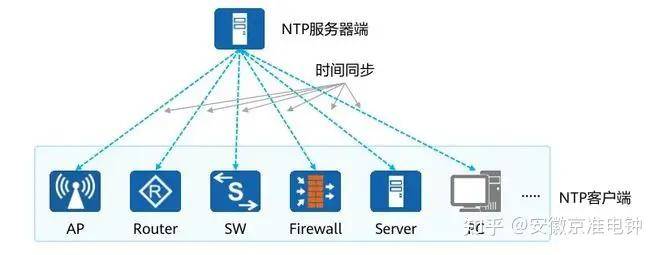
京準(zhǔn)電子、NTP網(wǎng)絡(luò)授時服務(wù)器工作原理及應(yīng)用領(lǐng)域分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論