") 如何應(yīng)對(duì)日益復(fù)雜的車載網(wǎng)絡(luò)架構(gòu)
如何應(yīng)對(duì)日益復(fù)雜的車載網(wǎng)絡(luò)架構(gòu)
隨著汽車科技化、智能化、網(wǎng)絡(luò)化的不斷發(fā)展,汽車內(nèi)部最新的應(yīng)用和功能正在不斷提高對(duì)帶寬、降低延遲、同步、高可用性、QoS和降低成本的要求。當(dāng)前和傳統(tǒng)的汽車網(wǎng)絡(luò)協(xié)議不足以滿足這些即將到來(lái)的需求。
在這種情況下,車載以太網(wǎng)的技術(shù)運(yùn)用越來(lái)越廣,當(dāng)然傳統(tǒng)車載網(wǎng)絡(luò)技術(shù)CAN/CAN FD也不可能被取代掉。至少就目前看來(lái),經(jīng)過(guò)數(shù)十年的發(fā)展,今天的汽車行業(yè)CAN在車載網(wǎng)絡(luò)領(lǐng)域占據(jù)著絕對(duì)的優(yōu)勢(shì),CAN已經(jīng)形成了完善的標(biāo)準(zhǔn)體系,這意味著CAN有著高度的兼容性、完善的開(kāi)發(fā)工具鏈體系、更大的供應(yīng)商選擇余地和更低的采購(gòu)成本(這對(duì)于整車開(kāi)發(fā)是極其重要的),所以現(xiàn)階段還是不可能完全替代掉CAN總線。
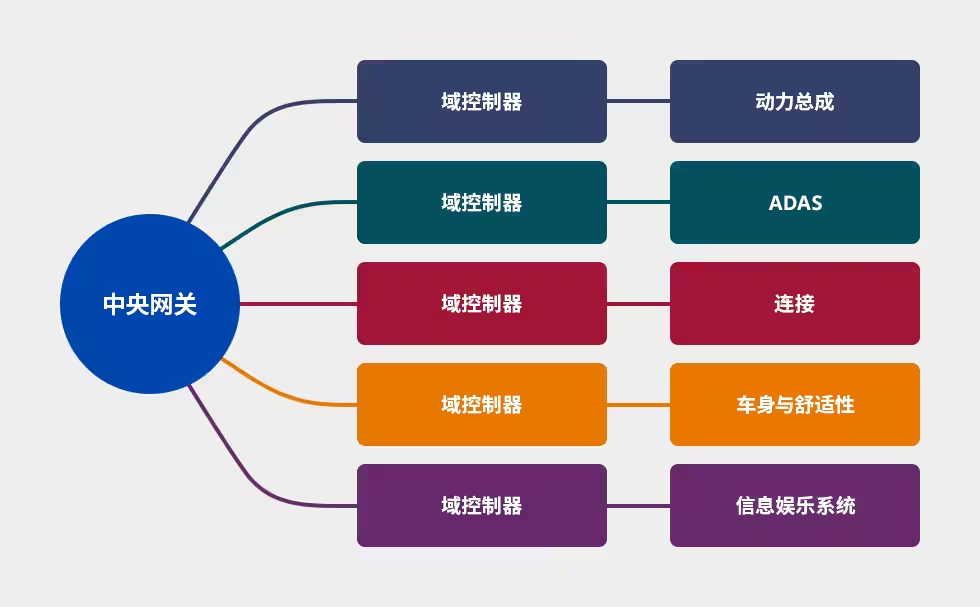
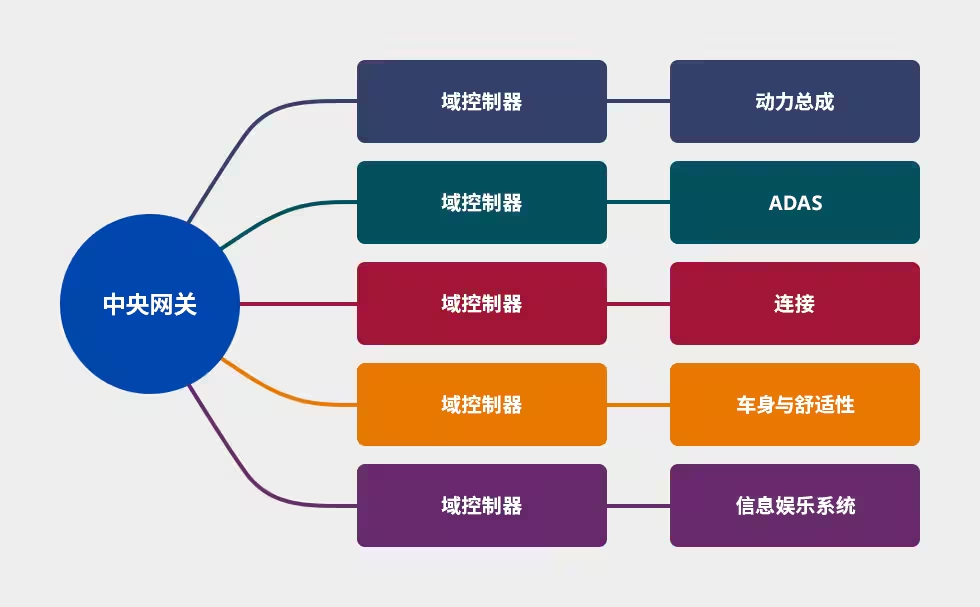
除此之外,加之汽車目前車載網(wǎng)絡(luò)系統(tǒng)可能還會(huì)有LIN總線、FlexRay、MOST等其他類型的總線。車載以太網(wǎng)的加入就會(huì)使得車載網(wǎng)路系統(tǒng)變得越來(lái)越復(fù)雜,那么在這種不可逆轉(zhuǎn)的大趨勢(shì)大背景下,我們?cè)撊绾伪WC通信延遲以及多數(shù)據(jù)并發(fā)的時(shí)候依然能夠保證車載網(wǎng)絡(luò)架構(gòu)滿足功能要求呢?如何才能設(shè)計(jì)出一種安全的、最優(yōu)的車載異構(gòu)網(wǎng)絡(luò)系統(tǒng)呢?
基于上述車載網(wǎng)絡(luò)日趨復(fù)雜的背景下,車載網(wǎng)絡(luò)工程師/架構(gòu)師急需一款專業(yè)并且功能強(qiáng)大的工具對(duì)初步的架構(gòu)設(shè)計(jì)結(jié)果進(jìn)行客觀分析,并且能夠提供可視化的分析結(jié)果,從中獲取優(yōu)化車輛網(wǎng)絡(luò)架構(gòu)優(yōu)化的思路。為此,虹科的供應(yīng)商RTaW(INRIA下屬公司)為汽車、航空等領(lǐng)域提供了實(shí)時(shí)網(wǎng)絡(luò)的仿真和配置工具RTaW-Pegase。
RTaW-Pegase支持TSN(時(shí)間敏感型網(wǎng)絡(luò))、CAN/CAN FD/CAN XL、LIN以及用于車外通信的無(wú)線網(wǎng)絡(luò)等。除了精確的實(shí)時(shí)仿真分析外,RTaW-Pegase還可以計(jì)算通信延遲和緩沖區(qū)利用率的上限,還包括現(xiàn)先進(jìn)的自動(dòng)配置算法來(lái)確保硬件和軟件組件的正確性和優(yōu)化方式。
RTaW-Pegase主要特征:
1. 支持工業(yè)以太網(wǎng),汽車交換以太網(wǎng),時(shí)間觸發(fā)的以太網(wǎng)以及具有任意速度和拓?fù)涞腁FDX;
2. 支持通過(guò)網(wǎng)關(guān)互連的CAN,交換以太網(wǎng),AFDX,F(xiàn)lexRay,LIN和ARINC429總線組成的異構(gòu)通信體系結(jié)構(gòu)的最壞情況分析和時(shí)序精確仿真;
3. 使用ZeroConfig-TSN(ZCT)進(jìn)行生成設(shè)計(jì)——一種“按鍵”方法,可自動(dòng)選擇和配置TSN網(wǎng)絡(luò);
4. 新增功能:拓?fù)鋲毫y(cè)試(TST)的設(shè)計(jì)空間探索算法可幫助設(shè)計(jì)人員在不完全了解通信要求的情況下做出早期的拓?fù)浜图夹g(shù)選擇;
5. 可以使用用戶編寫的Java插件對(duì)更高級(jí)別的通信層,運(yùn)行時(shí)環(huán)境和應(yīng)用程序進(jìn)行建模。這樣可以模擬完整的嵌入式系統(tǒng);
6. 針對(duì)互連網(wǎng)絡(luò)的優(yōu)化的TSN時(shí)間感知整形器(IEEE 802.11Qbv)傳輸時(shí)間表;
7. 支持Kalray MPPA和STMicroelectronics許多核心架構(gòu)的片上網(wǎng)絡(luò);
8. 分析和配置任務(wù)調(diào)度,事件觸發(fā)和時(shí)間觸發(fā)的調(diào)度,獨(dú)立任務(wù),以圖形和可運(yùn)行對(duì)象形式描述的任務(wù),跨任務(wù),網(wǎng)絡(luò)和CPU的全系統(tǒng)時(shí)序鏈的驗(yàn)證;
9. 實(shí)現(xiàn)網(wǎng)絡(luò)微積分的最新技術(shù),以計(jì)算通信延遲,幀抖動(dòng)和緩沖區(qū)利用率的上限;
10. 通過(guò)并行化的仿真引擎提供最壞情況的分析和定時(shí)精確的仿真,以預(yù)測(cè)最壞情況和典型的性能;
11. 支持FIFO,優(yōu)先級(jí),基于AVB信用的整形器,TSN時(shí)間感知整形器,幀搶占,TTEthernet和輪詢幀調(diào)度器;
12. 包括優(yōu)化的優(yōu)先級(jí)分配和路由算法,以及基于AVB信用的成形器和TSN時(shí)間感知成形器的配置算法;
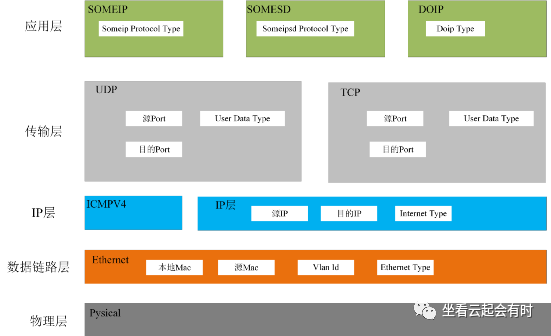
13. 支持周期性和零星的報(bào)文傳輸模式,UDP和TCP傳輸,分段報(bào)文(例如,視頻流和FTP流量)以及復(fù)雜的傳輸模式(例如,DoIp協(xié)議);
14. 帶有通信架構(gòu)編輯器,甘特圖和設(shè)計(jì)選項(xiàng)比較的豐富圖形版本和可視化環(huán)境;
15. 通過(guò)Java導(dǎo)出插件,CSV,XML文件和行業(yè)常用的格式,輕松導(dǎo)入和導(dǎo)出網(wǎng)絡(luò)配置和模擬結(jié)果;
16. 對(duì)于真正的最壞情況下的延遲,計(jì)算出的通信延遲是有限的(通常小于15%),并且會(huì)針對(duì)每個(gè)數(shù)據(jù)流進(jìn)行評(píng)估;
17. 包括NETAIRBENCH基準(zhǔn)測(cè)試生成器,它可以創(chuàng)建隨機(jī)而現(xiàn)實(shí)的以太網(wǎng)配置以進(jìn)行早期評(píng)估,或者研究網(wǎng)絡(luò)在未來(lái)的發(fā)展中將如何適應(yīng)更多的負(fù)載;
18. 分析速度快,在不到10秒的時(shí)間內(nèi)即可分析民用飛機(jī)中的大型AFDX網(wǎng)絡(luò);
19. 可在支持Java的所有32或64位平臺(tái)上運(yùn)行——無(wú)加密狗或許可證服務(wù)器保護(hù);
20. 提供專業(yè)支持和自定義擴(kuò)展。也可以通過(guò)軟件開(kāi)發(fā)人員SDK使用RTaW-Pegase功能,以在您自己的程序中使用
RTaW-Pegase應(yīng)用功能介紹:
1. 快速建模仿真:用戶可快速搭建待仿真的車載網(wǎng)絡(luò)拓?fù)浼澳P停–AN/CAN FD、LIN、車載以太網(wǎng)單獨(dú)的總線網(wǎng)絡(luò)或異構(gòu)網(wǎng)絡(luò))
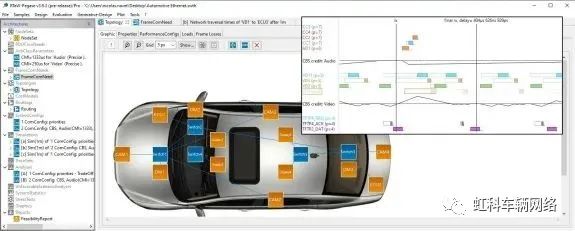
RTaW
圖3:快速建立仿真模型
CAN/CAN FD:支持導(dǎo)入標(biāo)準(zhǔn)數(shù)據(jù)庫(kù)、設(shè)置網(wǎng)關(guān)路由模式及其參數(shù),分析時(shí)間延遲;車載以太網(wǎng):可根據(jù)需要選擇不同流量整形(AVB、TSN等)技術(shù),分析不同技術(shù)對(duì)系統(tǒng)時(shí)間延遲的影響。
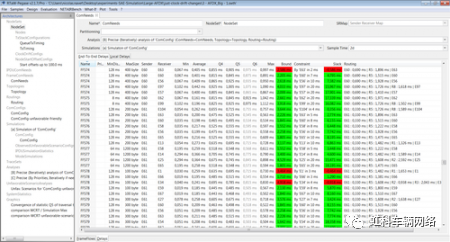
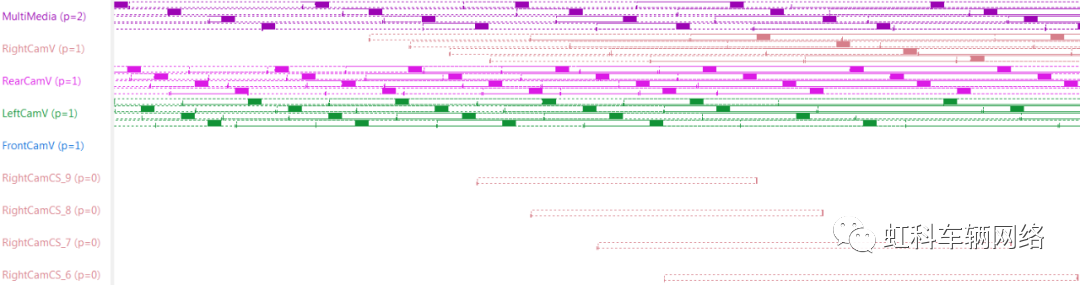
2. 仿真結(jié)果可視化:用戶可根據(jù)各種不同的仿真結(jié)果呈現(xiàn)方式,根據(jù)仿真結(jié)果分析各項(xiàng)報(bào)文的延遲情況等
RTaW
圖4:甘特圖
RTaW
圖5:列表形式
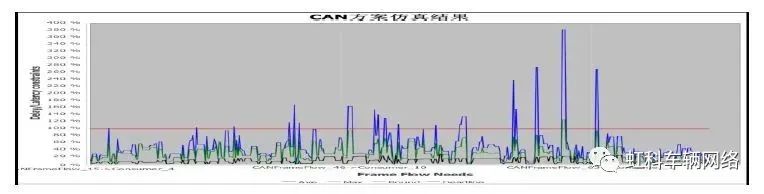
RTaW
圖6:折線圖形式
-
車載
+關(guān)注
關(guān)注
18文章
615瀏覽量
83408 -
網(wǎng)絡(luò)
+關(guān)注
關(guān)注
14文章
7587瀏覽量
89017
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
戴爾PowerFlex讓SDI成功落地
TOSUN 車載以太網(wǎng)仿真測(cè)試解決方案

是德科技亮相第三屆車載網(wǎng)絡(luò)和通信架構(gòu)技術(shù)及標(biāo)準(zhǔn)研討會(huì)
車載以太網(wǎng)的整體架構(gòu)解析

神經(jīng)網(wǎng)絡(luò)架構(gòu)有哪些
全光網(wǎng)絡(luò)與傳統(tǒng)網(wǎng)絡(luò)架構(gòu)的對(duì)比分析
工業(yè)級(jí)路由器:讓你輕松應(yīng)對(duì)復(fù)雜網(wǎng)絡(luò)環(huán)境!
小小噪聲濾波器,應(yīng)對(duì)車載網(wǎng)絡(luò)大挑戰(zhàn)
Arm推出v9架構(gòu)車用處理器,滿足車輛復(fù)雜處理需求
車載網(wǎng)絡(luò)協(xié)議與串?dāng)_問(wèn)題

連載一:車載以太網(wǎng)時(shí)間敏感性網(wǎng)絡(luò)應(yīng)用場(chǎng)景和實(shí)現(xiàn)難點(diǎn)
國(guó)產(chǎn)車載CAN IC崛起,能否挑戰(zhàn)NXP?
TDK | 小小噪聲濾波器,應(yīng)對(duì)車載網(wǎng)絡(luò)大挑戰(zhàn)
基于架構(gòu)設(shè)計(jì)的車載網(wǎng)聯(lián)系統(tǒng)驗(yàn)證體系研究
車載以太網(wǎng)靜態(tài)架構(gòu)介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論