 傳感器在焊縫跟蹤中的作用
傳感器在焊縫跟蹤中的作用
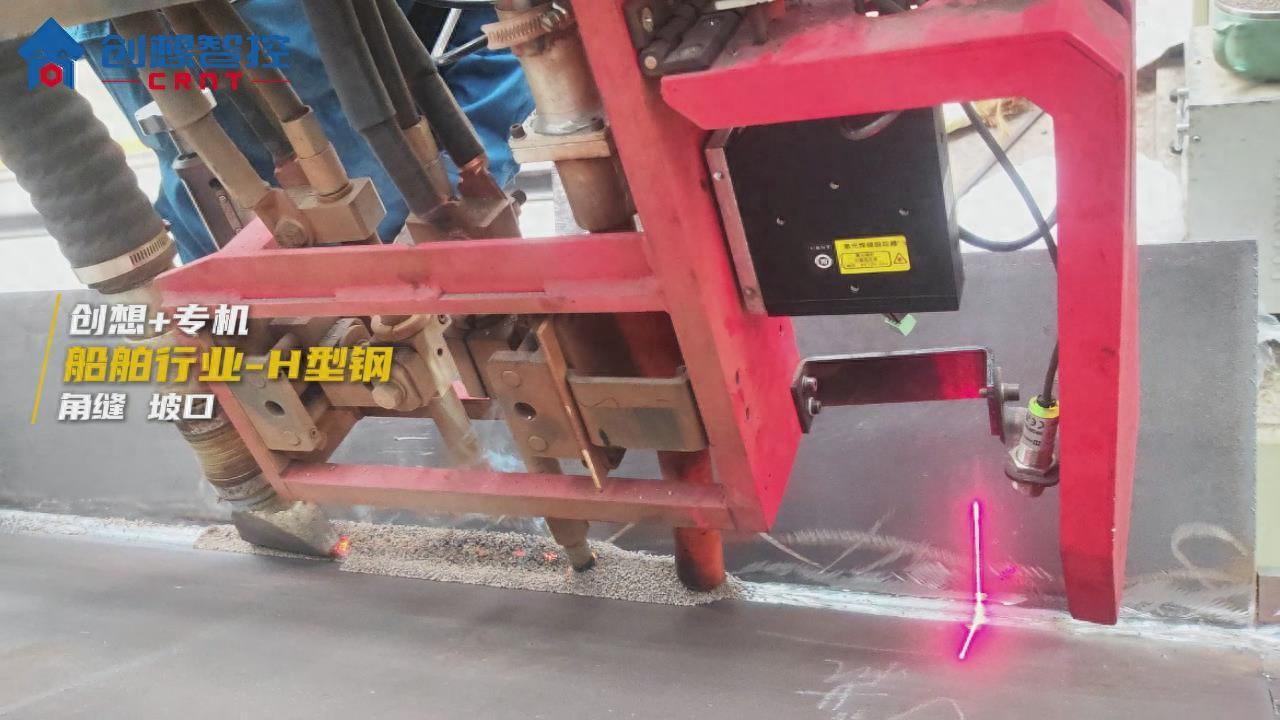
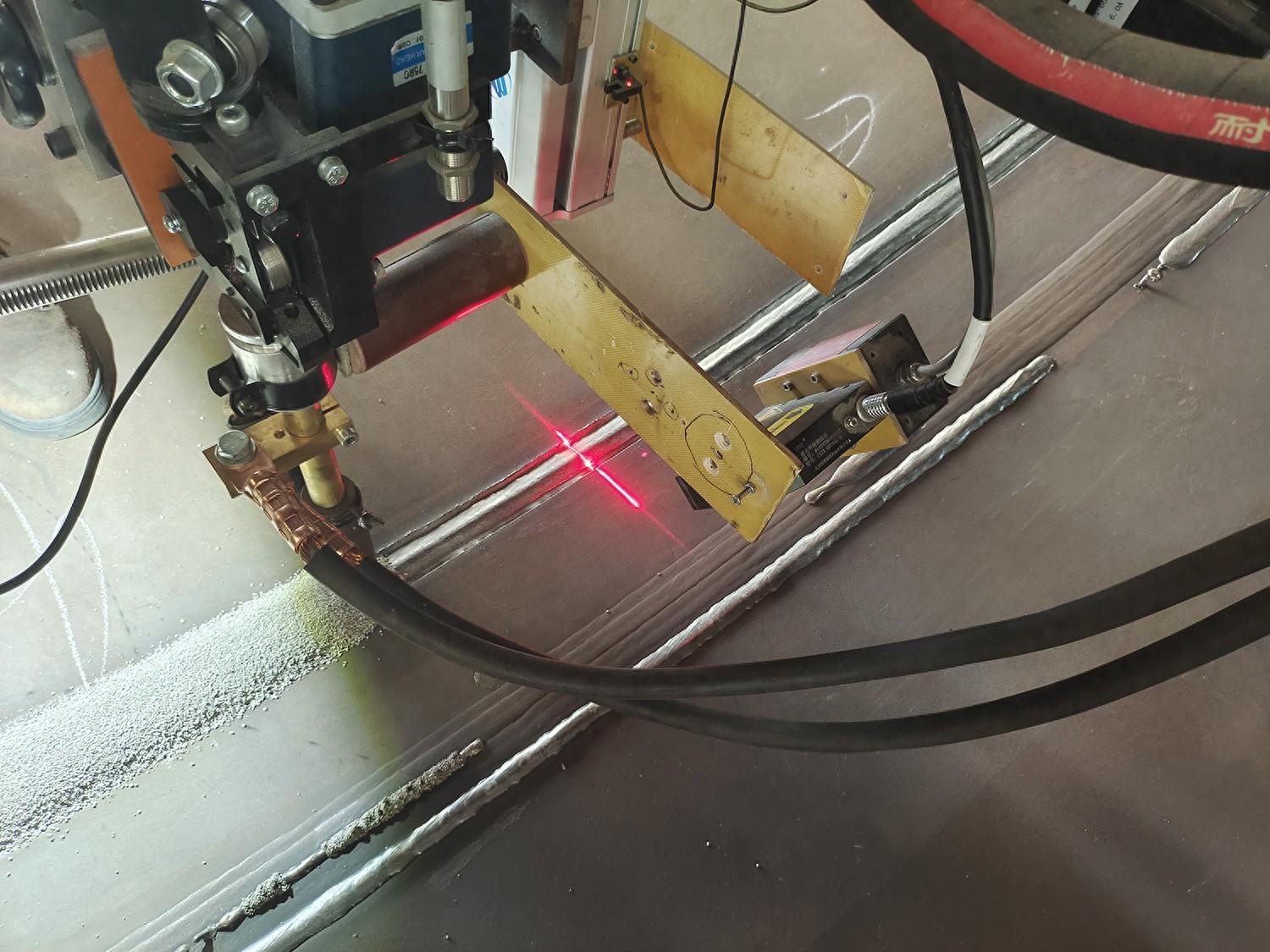
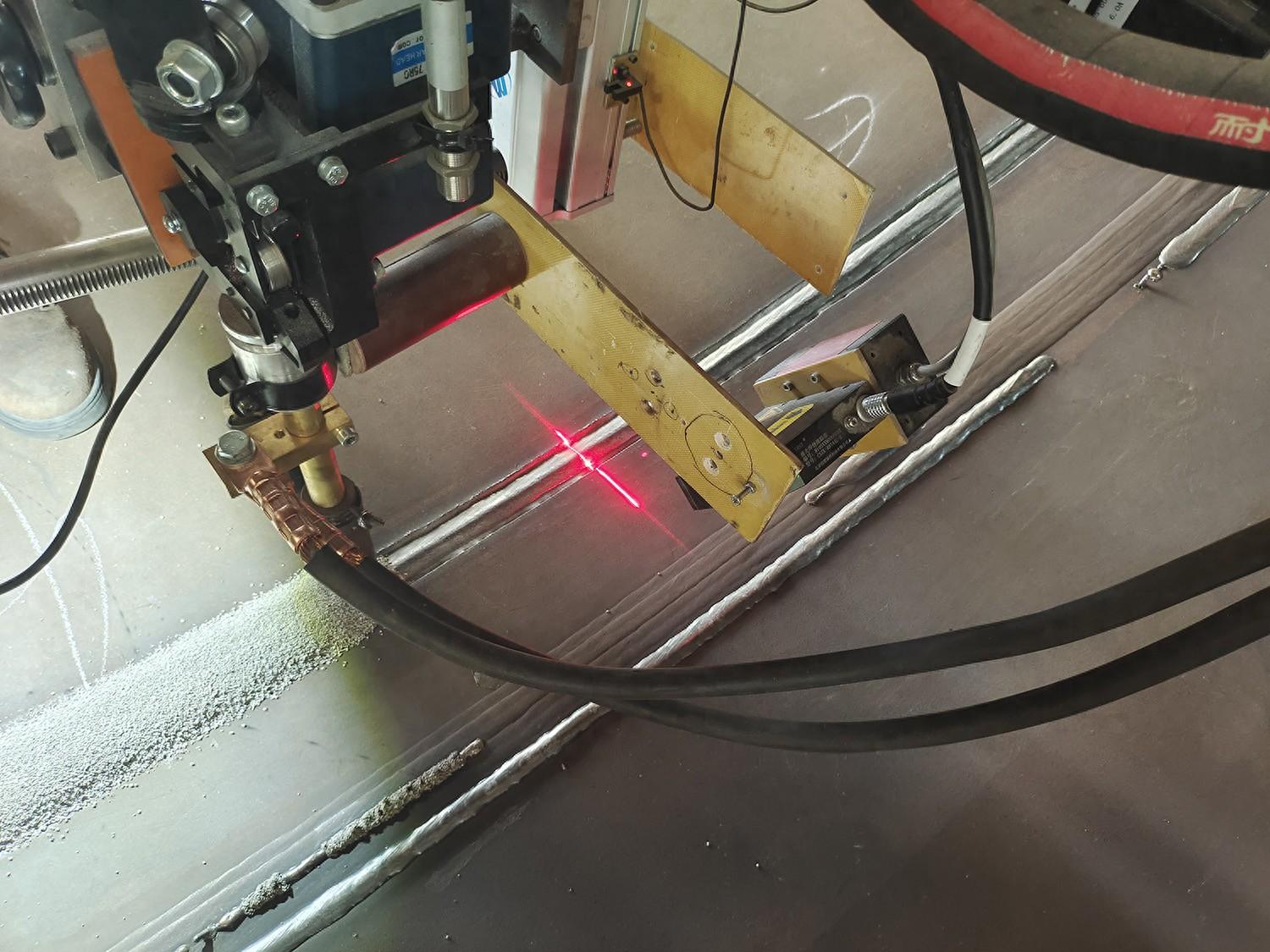
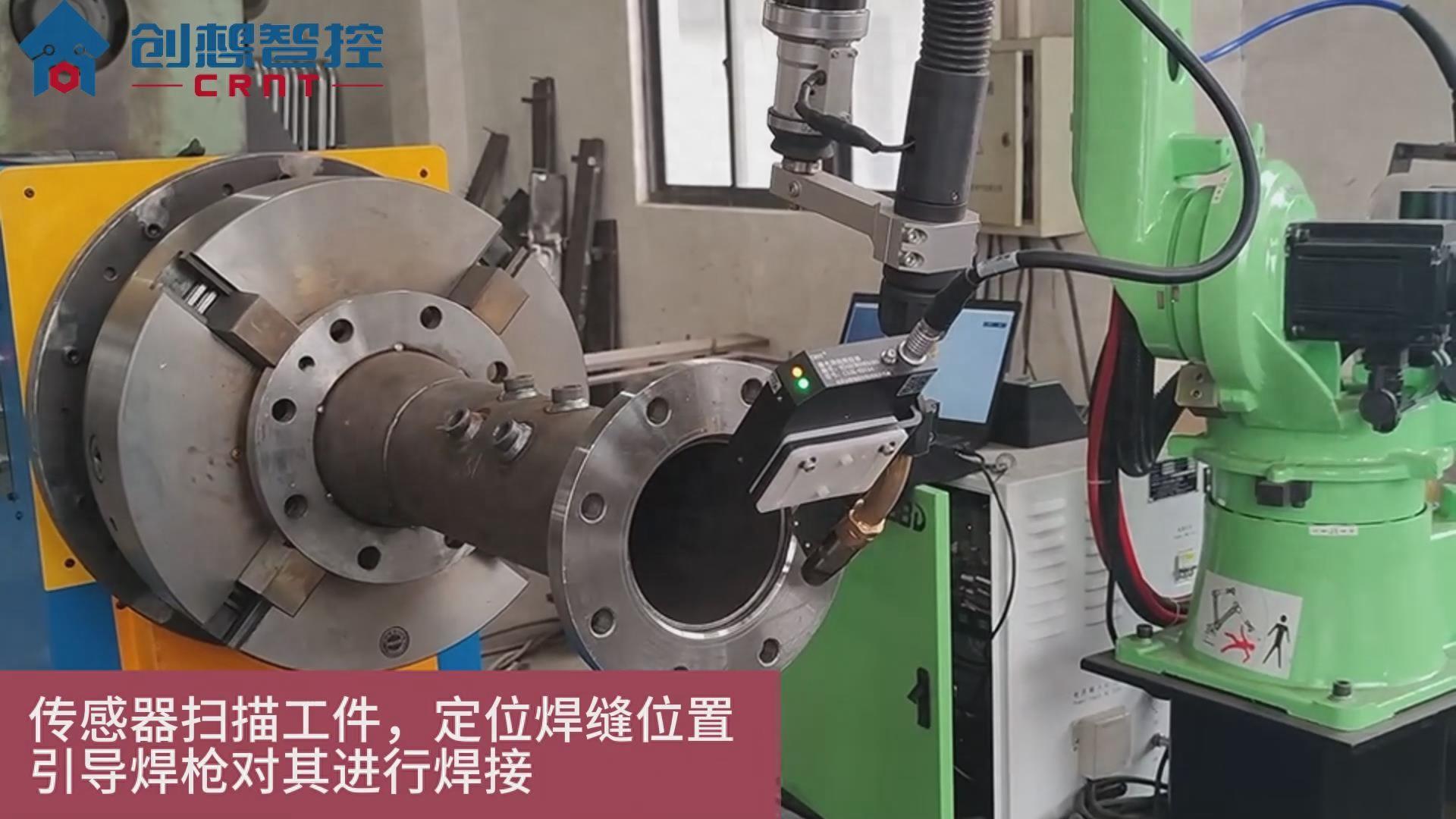
焊接自動化是焊接技術發展的方向,焊縫跟蹤是實現自動化焊接的主要方法之一,通過實時檢測焊縫的輪廓和位置,根據位置和幾何信息控制焊接機器人進行自動跟蹤焊接。激光視覺傳感技術作為主動測量技術,具有非接觸、精度高、速度快等優點,因而能夠應用于實時的焊縫跟蹤系統當中。
機器人自動化焊接過程中工件的定位誤差、加工誤差和激光傳感器的安裝誤差的問題,線結構視覺激光傳感器獲取焊縫形狀位置信息,并使機器人能夠自動調整焊槍位置和姿態來修正誤差,同時自適應不同角度焊縫的多層多道路徑規劃方法。
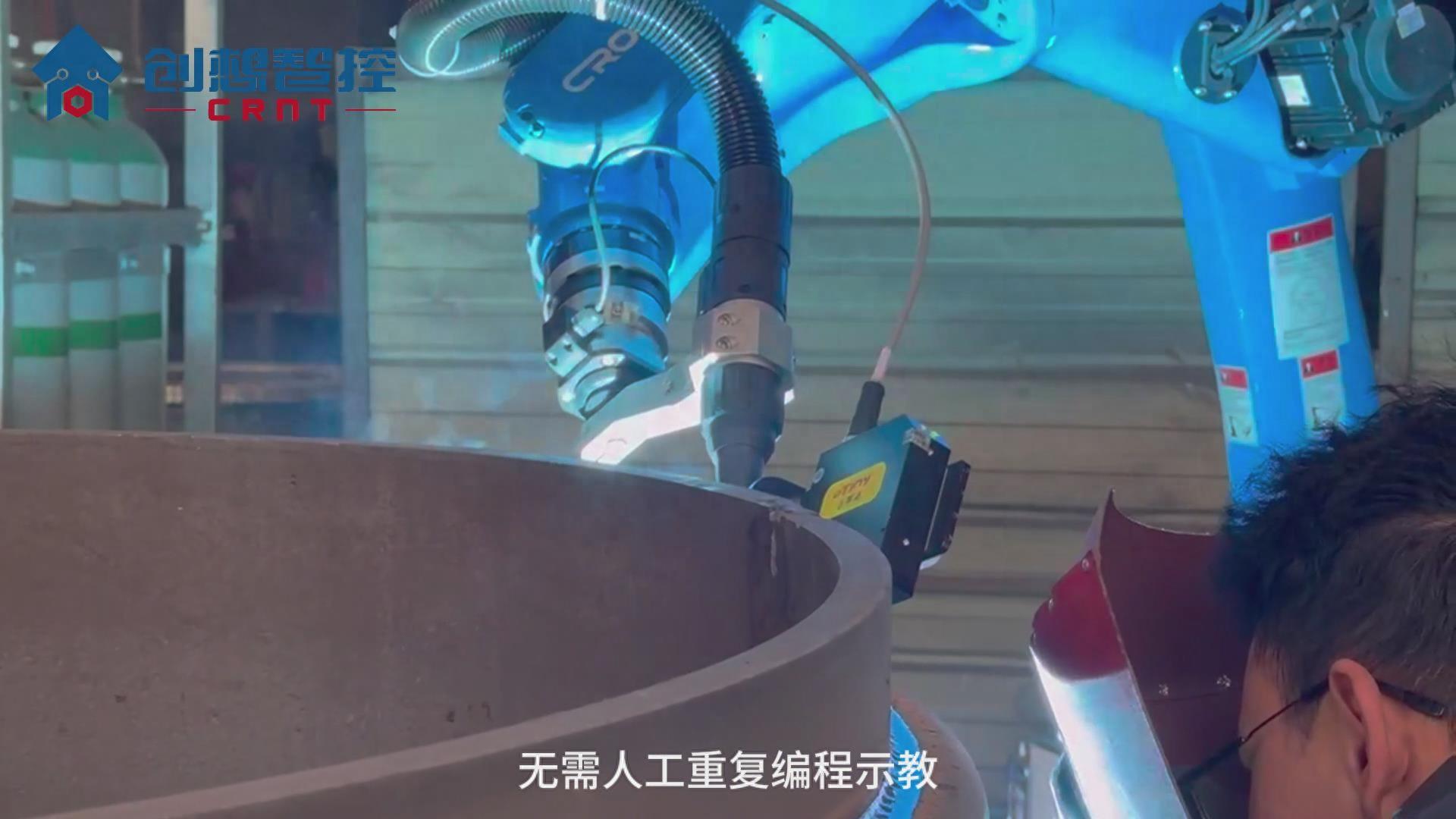
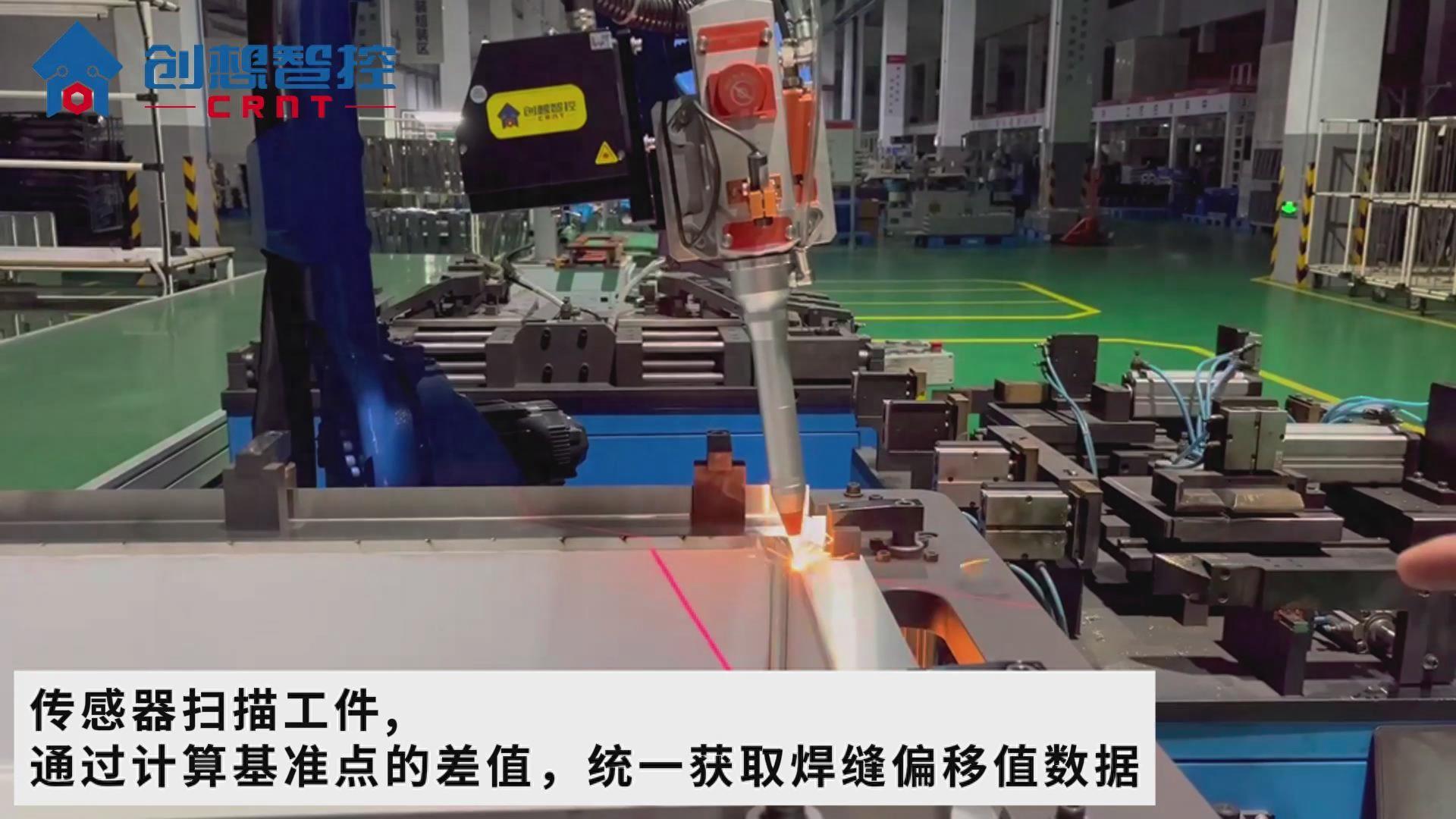
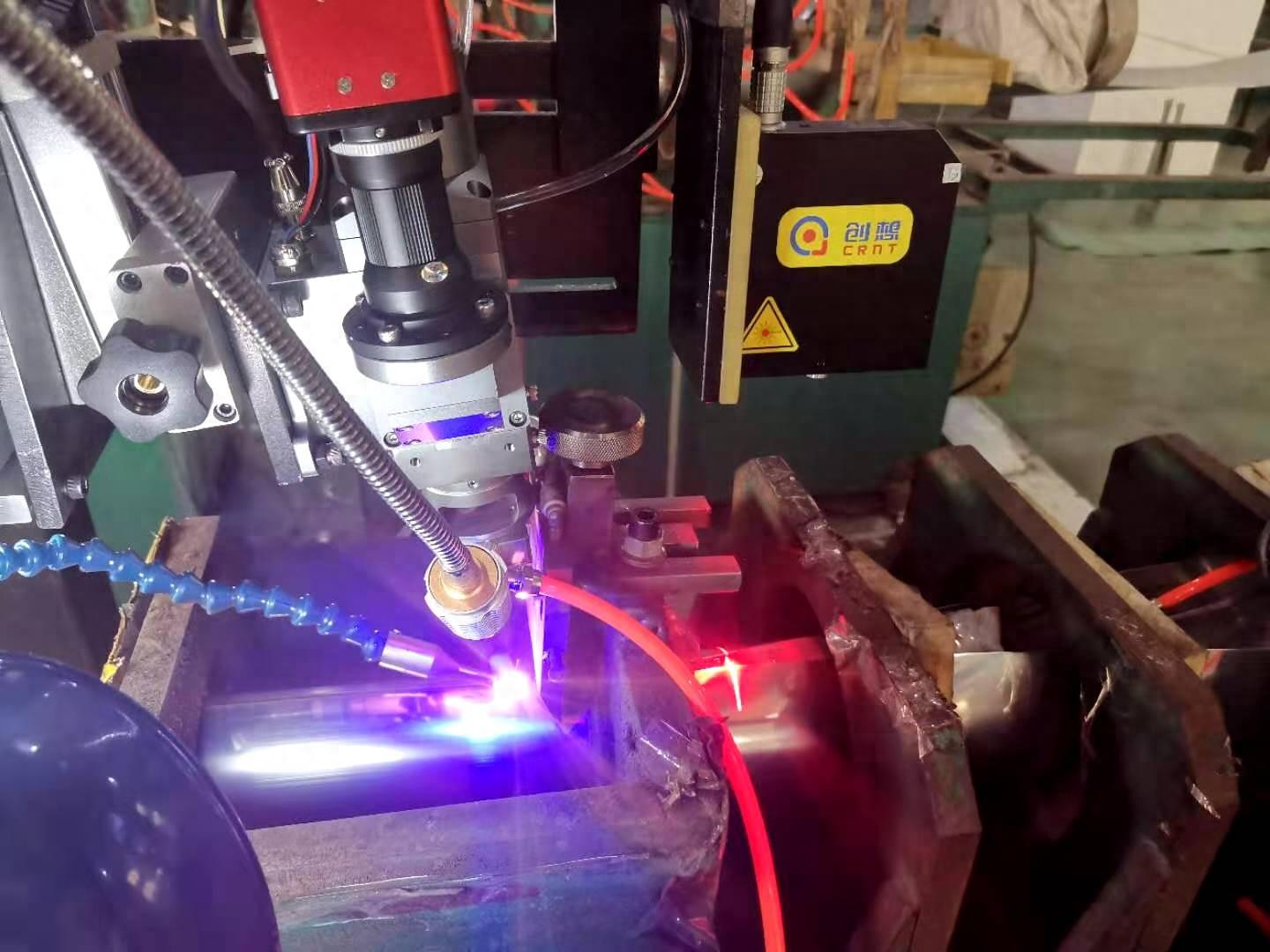
首先進行手眼標定,把焊道空間點信息從視覺坐標系轉換為機器人基坐標系下。然后對工件進行掃描,通過預設定算法完成對實際坐標點的預處理計算,并自適應調節工具坐標系的位姿彌補偏差;最后根據處理得到的焊縫坡口的特征參數和焊接工藝要求,規劃多層多道焊接的路徑完成焊接。
?

焊縫傳感器的作用方式
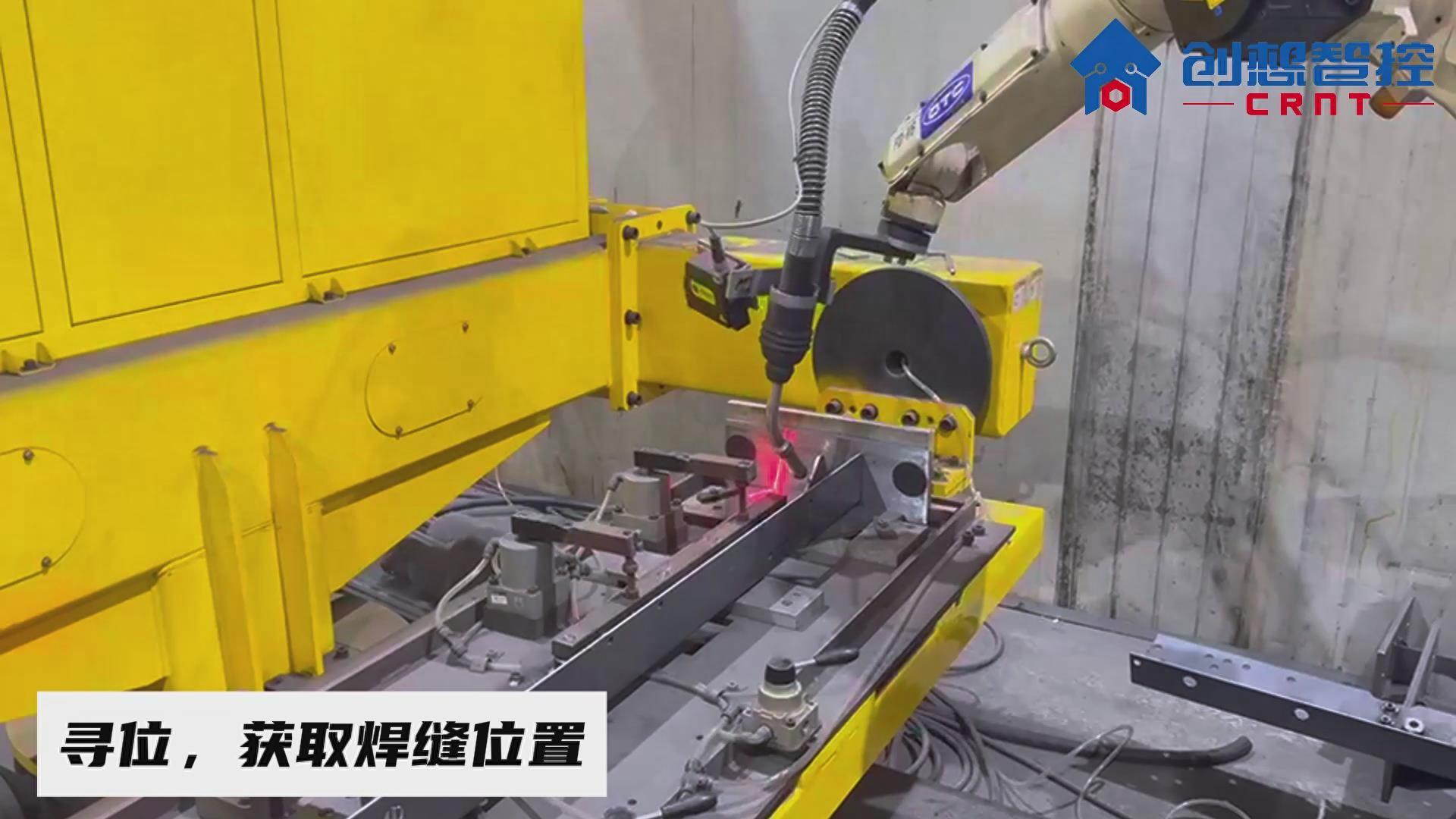
一類主要是在焊接過程中用以自動檢測焊接條件(例如坡口尺寸等)以實時自動控制焊接工藝參數來適應每一時刻的焊接狀況,稱為焊接條件實時跟蹤傳感器。另一類用于檢測構件位置。坡口位置或焊縫中心線位置以達到焊縫位置自動跟蹤的目的,簡稱為焊縫位置自動跟蹤傳感器。
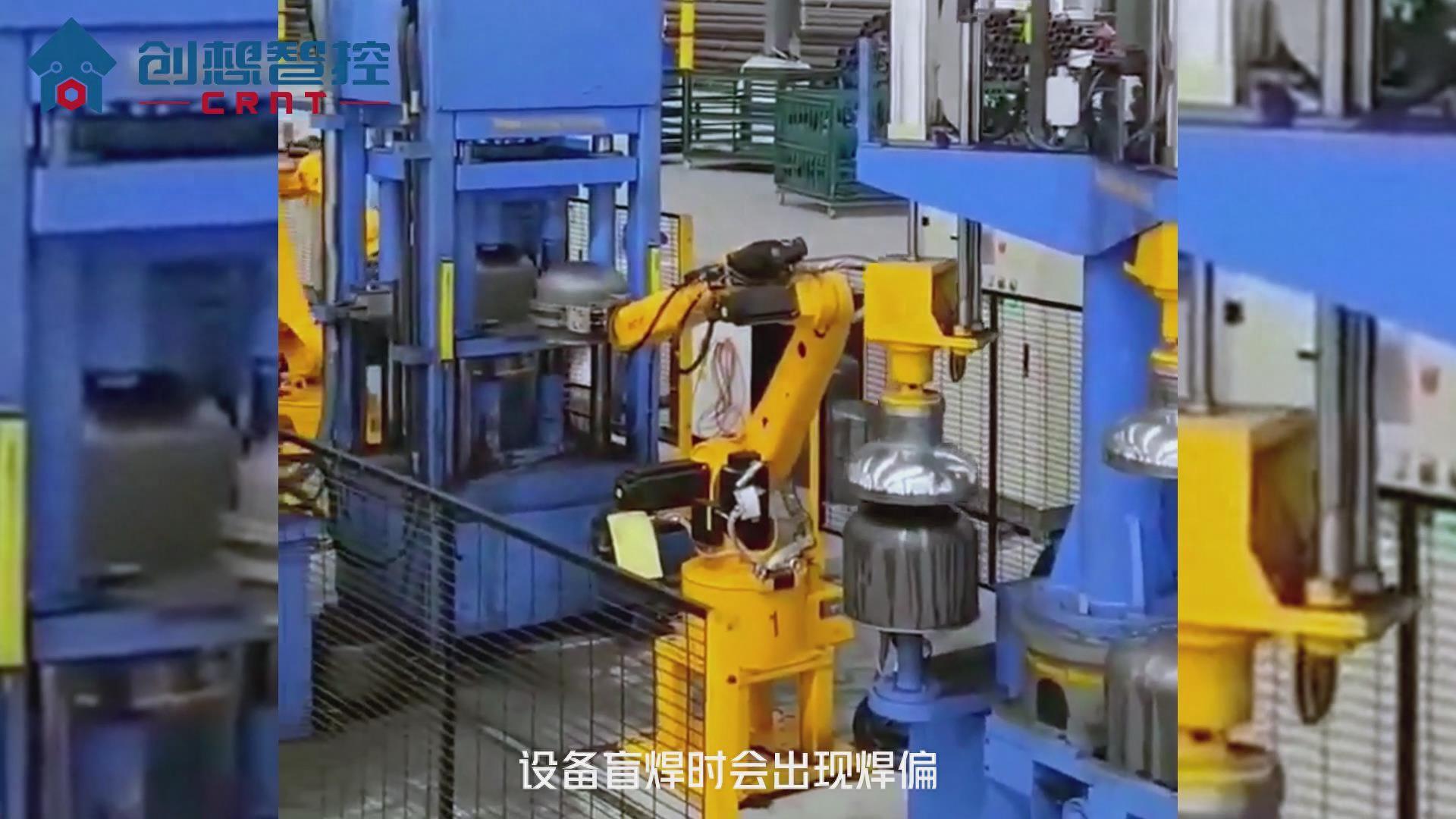
因此要求焊接機器人能夠以更強的適應性和智能性快速響應不斷變化的焊接環境。焊縫跟蹤是自動化焊接過程和焊接后的關鍵技術。激光焊縫跟蹤傳感技術在機器人焊接中起著極其重要的作用。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
焊縫跟蹤
+關注
關注
0文章
193瀏覽量
10450
發布評論請先 登錄
相關推薦
創想智控激光焊縫跟蹤系統在H型鋼多層多道焊接自動化的應用
問題。今天一起了解創想智控激光焊縫跟蹤系統在H型鋼多層多道焊接自動化的應用。 ??激光焊縫跟蹤系統原理 ??激光
創想智控激光焊縫跟蹤傳感器在海底抽淤管道全自動焊接的應用
焊接質量不穩定,無法滿足使用需求。今天一起來看創想智控激光焊縫跟蹤傳感器在海底抽淤管道全自動焊接的應用。 激光焊縫
創想智控激光焊縫跟蹤器在醫療攪拌罐反應釜自動焊接的應用
焊接路徑,提高焊接精度,減少人工干預,成了自動焊接領域的利器。今天跟隨創想智控一起了解激光焊縫跟蹤器在醫療攪拌罐反應釜自動焊接的應用。 ?? 激光焊縫

創想智控激光焊縫跟蹤傳感器在機械底盤自動引導焊接的應用
。今天一起了解創想智控激光焊縫跟蹤傳感器在機械底盤自動掃描焊接的應用。 ?? 激光焊縫跟蹤系統原

創想智控激光焊縫跟蹤傳感器在汽車配件導風罩自動化焊接的應用
風罩的焊接,傳統方法已無法滿足高效、高質的生產需求。今天一起了解創想智控激光焊縫跟蹤傳感器在汽車配件導風罩自動化焊接的應用。 激光焊縫
創想智控焊縫跟蹤傳感器在歐式箱變底座拼接焊縫自動焊接的應用
難以滿足高精度、高效率的焊接需求。今天一起了解創想智控焊縫跟蹤傳感器在歐式箱變底座拼接焊縫自動焊接的應用。 激光

創想智控激光焊縫跟蹤傳感器在廚房水槽智能焊接的應用
在現代制造業中,智能化與自動化技術的應用已成為提升生產效率和產品質量的關鍵因素。在廚房設備制造領域,水槽的焊接質量直接影響產品的耐用性和美觀度。激光焊縫

焊縫跟蹤系統應用解析:如何實現精準焊接與自動化生產
隨著工業技術的不斷發展,焊接作為重要的連接工藝,在各個領域都得到了廣泛應用。然而,傳統的焊接方式存在精度低、效率低下等問題,無法滿足現代工業生產的需求。創想智控焊縫跟蹤系統通過高精度傳感器
常用的焊縫自動跟蹤傳感器有哪些
在焊接過程中,焊縫的準確跟蹤對于確保焊接質量至關重要。傳統的焊接方法可能需要人工干預以確保焊縫的準確對齊,但隨著技術的發展,

創想激光焊縫跟蹤系統適配錢江機器人在智能焊接領域的應用
一起了解創想激光焊縫跟蹤系統適配錢江機器人在智能焊接領域的應用。 創想焊縫跟蹤系統原理 創想焊縫跟蹤

創想焊縫跟蹤系統在爾必地機器人自適應焊接中的應用案例
隨著制造業的不斷發展,焊接技術在各個領域中得到了廣泛的應用。在焊接過程中,焊縫的質量直接影響著產品的性能和壽命。為了提高焊接效率和質量,自適應焊接技術逐漸成為焊接領域的研究熱點之一,創





 工商網監
工商網監
評論