") 激光雷達(dá)按功能分類(lèi)有那些?
激光雷達(dá)按功能分類(lèi)有那些?
激光雷達(dá)按功能分類(lèi):
激光測(cè)距雷達(dá)
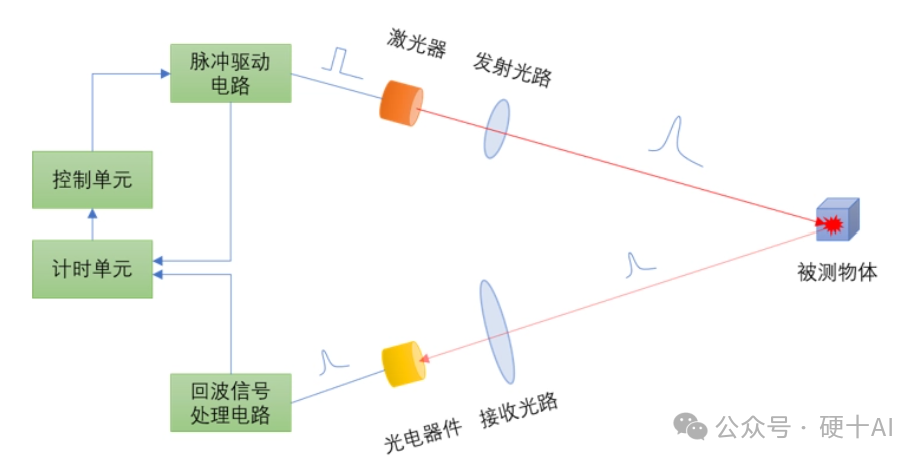
激光測(cè)距雷達(dá)是通過(guò)對(duì)被測(cè)物體發(fā)射激光光束,并接收該激光光束的反射波,記錄該時(shí)間差,來(lái)確定被測(cè)物體與測(cè)試點(diǎn)的距離。傳統(tǒng)上,激光雷達(dá)可用于工業(yè)的安全檢測(cè)領(lǐng)域,如科幻片中看到的激光墻,當(dāng)有人闖入時(shí),系統(tǒng)會(huì)立馬做出反應(yīng),發(fā)出預(yù)警。另外,激光測(cè)距雷達(dá)在空間測(cè)繪領(lǐng)域也有廣泛應(yīng)用。但隨著人工智能行業(yè)的興起,激光測(cè)距雷達(dá)已成為機(jī)器人體內(nèi)不可或缺的核心部件,配合SLAM技術(shù)使用,可幫助機(jī)器人進(jìn)行實(shí)時(shí)定位導(dǎo)航,智能避障,實(shí)現(xiàn)自主行走。深圳不止技術(shù)研制的DTOF激光雷達(dá)廣泛應(yīng)用于無(wú)人駕駛、商用服務(wù)機(jī)器人、物流AGV車(chē)、大屏互動(dòng)、安防、測(cè)繪、港口、工業(yè)自動(dòng)化等八大產(chǎn)業(yè)生態(tài)圈,其在50米測(cè)距半徑內(nèi),每秒可輸出 20K 點(diǎn)云數(shù)據(jù),配合自研信號(hào)處理算法,整機(jī)防塵防水達(dá)到IP65,并實(shí)現(xiàn)毫米級(jí)別的解析度。
激光測(cè)速雷達(dá)
激光測(cè)速雷達(dá)是對(duì)物體移動(dòng)速度的測(cè)量,通過(guò)對(duì)被測(cè)物體進(jìn)行兩次有特定時(shí)間間隔的激光測(cè)距,從而得到該被測(cè)物體的移動(dòng)速度。
激光雷達(dá)測(cè)速的方法主要有兩大類(lèi),一類(lèi)是基于激光雷達(dá)測(cè)距原理實(shí)現(xiàn),即以一定時(shí)間間隔連續(xù)測(cè)量目標(biāo)距離,用兩次目標(biāo)距離的差值除以時(shí)間間隔就可得知目標(biāo)的速度值,速度的方向根據(jù)距離差值的正負(fù)就可以確定。這種方法系統(tǒng)結(jié)構(gòu)簡(jiǎn)單,測(cè)量精度有限,只能用于反射激光較強(qiáng)的硬目標(biāo)。另一類(lèi)測(cè)速方法是利用多普勒頻移。多普勒頻移是指目標(biāo)與激光雷達(dá)之間存在相對(duì)速度時(shí),接收回波信號(hào)的頻率與發(fā)射信號(hào)的頻率之間會(huì)產(chǎn)生一個(gè)頻率差,這個(gè)頻率差就是多普勒頻移。
激光成像雷達(dá)
激光成像雷達(dá)可用于探測(cè)和跟蹤目標(biāo)、獲得目標(biāo)方位及速度信息等。它能夠完成普通雷達(dá)所不能完成的任務(wù),如探測(cè)潛艇、水雷、隱藏的軍事目標(biāo)等等。在軍事、航空航天、工業(yè)和醫(yī)學(xué)領(lǐng)域被廣泛應(yīng)用。
大氣探測(cè)激光雷達(dá)
大氣探測(cè)激光雷達(dá)主要是用來(lái)探測(cè)大氣中的分子、煙霧的密度、溫度、風(fēng)速、風(fēng)向及大氣中水蒸氣的濃度的,以達(dá)到對(duì)大氣環(huán)境進(jìn)行監(jiān)測(cè)及對(duì)暴風(fēng)雨、沙塵暴等災(zāi)害性天氣進(jìn)行預(yù)報(bào)的目的。
跟蹤雷達(dá)
跟蹤雷達(dá)可以連續(xù)的去跟蹤一個(gè)目標(biāo),并測(cè)量該目標(biāo)的坐標(biāo),提供目標(biāo)的運(yùn)動(dòng)軌跡。不僅用于火炮控制、導(dǎo)彈制導(dǎo)、外彈道測(cè)量、衛(wèi)星跟蹤、突防技術(shù)研究等,而且在氣象、交通、科學(xué)研究等領(lǐng)域也在日益擴(kuò)大。
-
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3972瀏覽量
189927
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

國(guó)產(chǎn)功能安全激光雷達(dá),杭州歐鐳激光技術(shù)有限公司,2D 270° 功能安全型激光雷達(dá) GS1-5#
激光雷達(dá)會(huì)傷害眼睛嗎?

激光雷達(dá)的工作原理和分類(lèi)
激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
lidar激光雷達(dá)掃描儀有什么用
一文看懂激光雷達(dá)

商用激光雷達(dá)產(chǎn)品InnovizOne有什么獨(dú)特之處
硅基片上激光雷達(dá)的測(cè)距原理

激光雷達(dá)的探測(cè)技術(shù)介紹 機(jī)載激光雷達(dá)發(fā)展歷程

亮道智能:發(fā)布全新一代激光雷達(dá),未來(lái)主攻固態(tài)激光雷達(dá)低價(jià)市場(chǎng)
激光雷達(dá)LIDAR基本工作原理

512線激光雷達(dá)還不是盡頭,1024線激光雷達(dá)早在兩年前已經(jīng)推出?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論