") 永磁同步電機(jī)運(yùn)作
永磁同步電機(jī)運(yùn)作
主要對(duì)于裝載在大眾E-Golf使用的三相永磁同步電機(jī)/充電機(jī)(MG)進(jìn)行其運(yùn)作進(jìn)行研究探討,沿著典型的運(yùn)作原理及電路特性提出一些問(wèn)題,我想分享和討論這些問(wèn)題這些問(wèn)題與研究結(jié)果。在我們開(kāi)始進(jìn)行之前,請(qǐng)記住安全、認(rèn)證、訓(xùn)練及系統(tǒng)知識(shí)都是缺一不可的,因?yàn)橐韵聝?nèi)容包含包含活電工作。關(guān)于系統(tǒng)知識(shí),以下自學(xué)課程(SSP-530 & SSP-527)是VAG對(duì)于裝載在E-Golf上的高電壓系統(tǒng)運(yùn)行原理提供珍貴見(jiàn)解的說(shuō)明。 備注: SSPs無(wú)法替代EV培訓(xùn)
讓我從我所量測(cè)的電路概述開(kāi)始。以下之波型截圖表示我們的E-Golf從靜止?fàn)顟B(tài)加速并由第三級(jí)的剎車(chē)動(dòng)能回充減速(可供駕駛者選擇)達(dá)到停止。也就是說(shuō)車(chē)輛能夠減速是藉由轉(zhuǎn)子承受負(fù)載導(dǎo)致,此時(shí)轉(zhuǎn)子為充電機(jī)的作用。(轉(zhuǎn)子經(jīng)傳動(dòng)系統(tǒng)與車(chē)輪連接)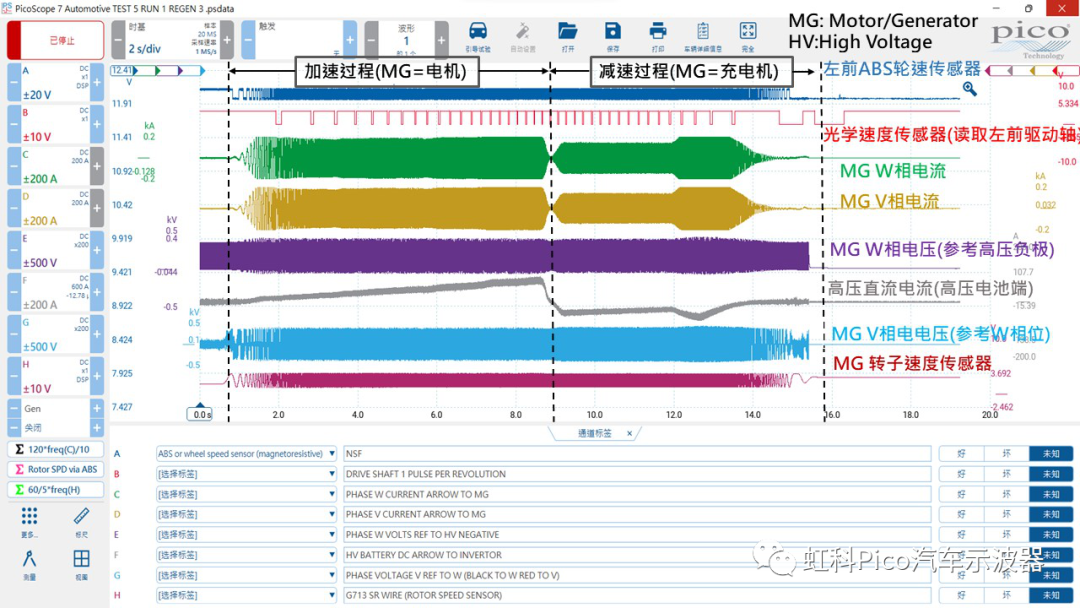 在以上的測(cè)試期間,我們有一個(gè)關(guān)于MG狀態(tài)切換的問(wèn)題: 我們?nèi)绾螐牟东@到的數(shù)據(jù)判斷MG何時(shí)為電機(jī)或充電機(jī)運(yùn)行狀態(tài)?我想最簡(jiǎn)單的答案就在通道F捕獲到的高壓電池直流電流波型。我們精確捕獲了高壓電池電流從正值(為電機(jī)供電)變?yōu)樨?fù)值(MG轉(zhuǎn)為充電機(jī)回充電流)的轉(zhuǎn)折點(diǎn)。(見(jiàn)下文)
在以上的測(cè)試期間,我們有一個(gè)關(guān)于MG狀態(tài)切換的問(wèn)題: 我們?nèi)绾螐牟东@到的數(shù)據(jù)判斷MG何時(shí)為電機(jī)或充電機(jī)運(yùn)行狀態(tài)?我想最簡(jiǎn)單的答案就在通道F捕獲到的高壓電池直流電流波型。我們精確捕獲了高壓電池電流從正值(為電機(jī)供電)變?yōu)樨?fù)值(MG轉(zhuǎn)為充電機(jī)回充電流)的轉(zhuǎn)折點(diǎn)。(見(jiàn)下文)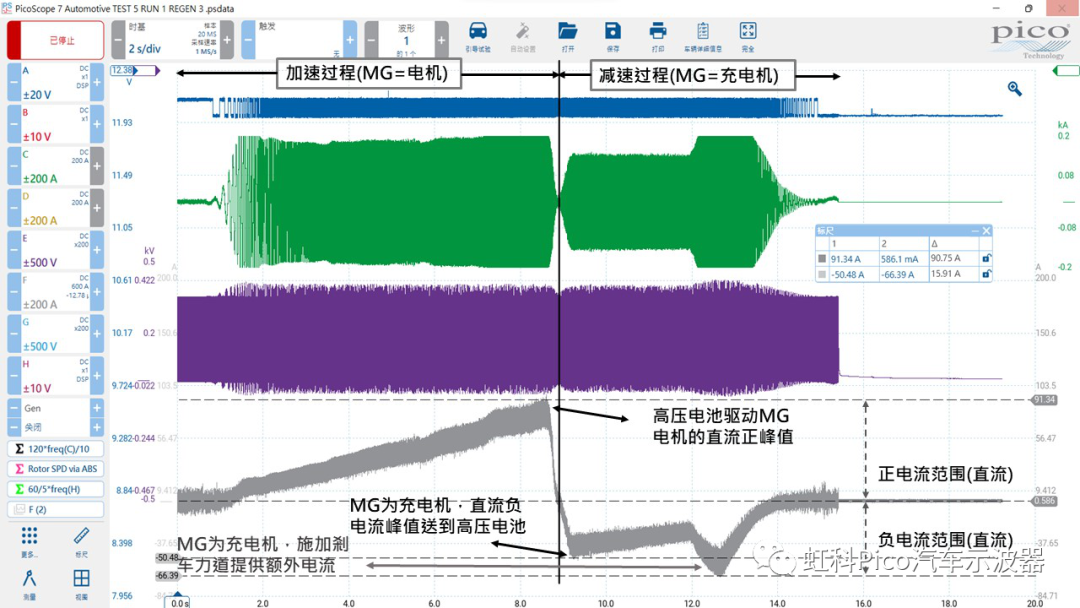 注意高壓電池直流正電流的峰值大約位置。上方截圖畫(huà)面顯示+91A。這用來(lái)提供電機(jī)馬達(dá)電力并驅(qū)動(dòng)車(chē)輛。而在減速期間,由于MG此時(shí)為充電機(jī),電流是相反過(guò)來(lái)的,導(dǎo)致負(fù)峰值電流大約在-50A。在波型紀(jì)錄中約12.5秒時(shí),另一個(gè)額外的-16A電流被傳輸?shù)礁邏弘姵?總共-66.85A),這是由于剎車(chē)踏板的踩踏進(jìn)一步降低轉(zhuǎn)子速度并產(chǎn)生額外的充電電流。小提示:注意通道F的信號(hào)測(cè)量標(biāo)尺為4個(gè)而不是2個(gè)!為了在一個(gè)波型上使用4個(gè)信號(hào)測(cè)量標(biāo)尺,你必須建立一個(gè)自動(dòng)隱藏在你欲量測(cè)波型后方的參考波型。復(fù)制波型的好處是額外有2個(gè)標(biāo)尺可供同一波型進(jìn)行多重測(cè)量。有關(guān)參考波形的更多信息,我建議您參閱下方視頻。
注意高壓電池直流正電流的峰值大約位置。上方截圖畫(huà)面顯示+91A。這用來(lái)提供電機(jī)馬達(dá)電力并驅(qū)動(dòng)車(chē)輛。而在減速期間,由于MG此時(shí)為充電機(jī),電流是相反過(guò)來(lái)的,導(dǎo)致負(fù)峰值電流大約在-50A。在波型紀(jì)錄中約12.5秒時(shí),另一個(gè)額外的-16A電流被傳輸?shù)礁邏弘姵?總共-66.85A),這是由于剎車(chē)踏板的踩踏進(jìn)一步降低轉(zhuǎn)子速度并產(chǎn)生額外的充電電流。小提示:注意通道F的信號(hào)測(cè)量標(biāo)尺為4個(gè)而不是2個(gè)!為了在一個(gè)波型上使用4個(gè)信號(hào)測(cè)量標(biāo)尺,你必須建立一個(gè)自動(dòng)隱藏在你欲量測(cè)波型后方的參考波型。復(fù)制波型的好處是額外有2個(gè)標(biāo)尺可供同一波型進(jìn)行多重測(cè)量。有關(guān)參考波形的更多信息,我建議您參閱下方視頻。
為了了解MG作為充電機(jī)時(shí)的性能,可以從上方PicoScope的數(shù)據(jù)數(shù)據(jù)和下面的理論更深入探討三相永磁同步電機(jī)的運(yùn)作特性。 關(guān)于三相無(wú)刷直流電機(jī)的討論(為了有更好的概述),可點(diǎn)擊文章末尾“閱讀原文”了解,這正是我們?cè)谲?chē)輛中也有的問(wèn)題討論。 與其我試圖解釋三相無(wú)刷直流電機(jī)的功能,不如看看下面的精彩動(dòng)畫(huà)。請(qǐng)注意,在動(dòng)畫(huà)中,轉(zhuǎn)子位于定子外側(cè)。 而 EV 應(yīng)用中,轉(zhuǎn)子放置在定子內(nèi)部并最終與車(chē)輪連接。
總結(jié)以上動(dòng)畫(huà)中描述的運(yùn)行,我們的 MG 定子中會(huì)產(chǎn)生一個(gè)旋轉(zhuǎn)磁場(chǎng) (RMF),簡(jiǎn)稱為”電子換向”或“EC”。 RMF 的速度藉由 PWM 控制信號(hào)的多個(gè)功率晶體管精確控制開(kāi)關(guān)。高壓直流電流的精確開(kāi)關(guān)控制(PWM控制)也造成了三相高壓交流電流之產(chǎn)生。以下視頻更詳細(xì)地介紹直流到交流的轉(zhuǎn)換原理。
藉由使用下圖中通道 E 的正占空比波型,我們可以看到我們其中一個(gè) MG 相位(W 相位)的高壓如何被控制用以產(chǎn)生交流電流的。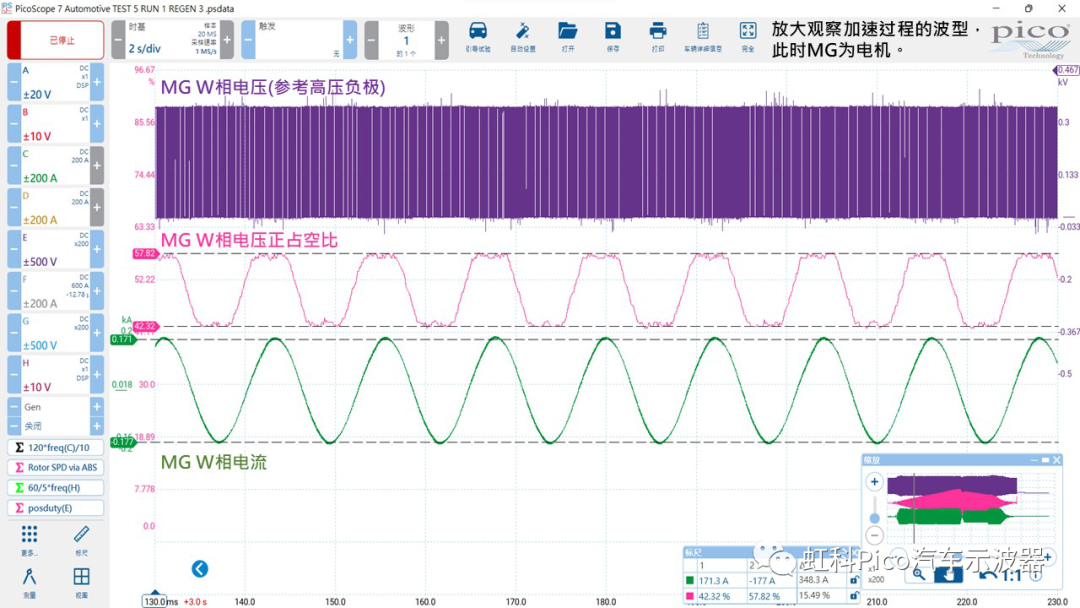 請(qǐng)注意,以上的數(shù)學(xué)通道“posduty(E)”顯示了 MG W 相電壓的峰值正占空比控制(約 58%)對(duì)應(yīng)到流經(jīng)相位繞組的峰值正電流(約 171 A)。同樣,我們較低的正占空比(42%)對(duì)應(yīng)到我們的峰值負(fù)電流 -177 A 相近。請(qǐng)注意,下面屏幕截圖中的正占空比數(shù)學(xué)通道也顯示了電壓如何領(lǐng)先超前于電流(約 470 μs),這是典型的電感特征,并凸顯了線圈(W 相)由于感抗產(chǎn)生而與交流電流相反的固有特性。
請(qǐng)注意,以上的數(shù)學(xué)通道“posduty(E)”顯示了 MG W 相電壓的峰值正占空比控制(約 58%)對(duì)應(yīng)到流經(jīng)相位繞組的峰值正電流(約 171 A)。同樣,我們較低的正占空比(42%)對(duì)應(yīng)到我們的峰值負(fù)電流 -177 A 相近。請(qǐng)注意,下面屏幕截圖中的正占空比數(shù)學(xué)通道也顯示了電壓如何領(lǐng)先超前于電流(約 470 μs),這是典型的電感特征,并凸顯了線圈(W 相)由于感抗產(chǎn)生而與交流電流相反的固有特性。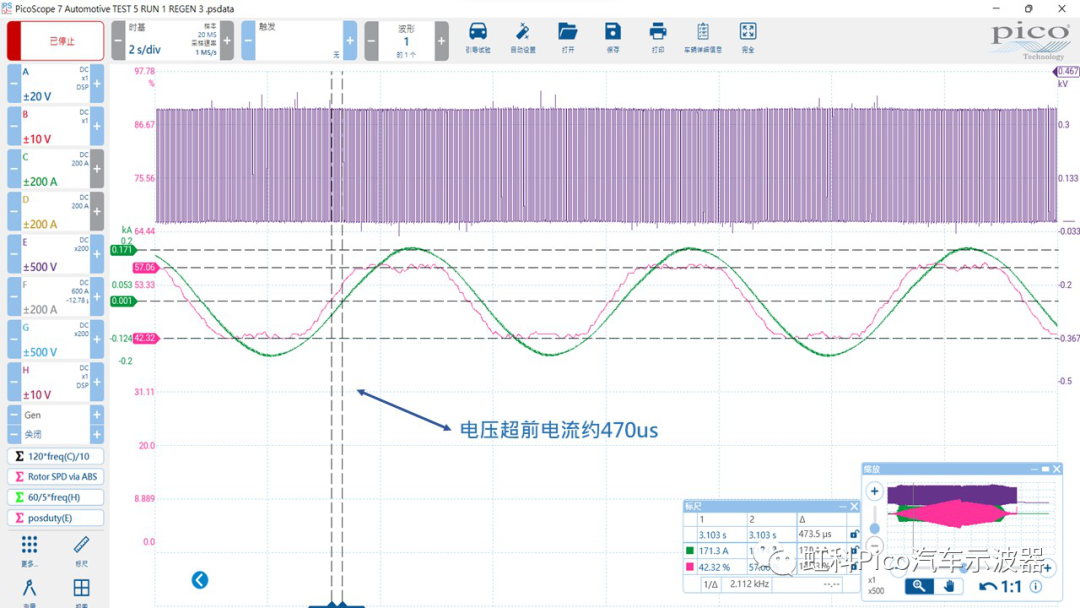 現(xiàn)在我們有了 RMF(其轉(zhuǎn)速稱為同步速度),我們現(xiàn)在可以藉由定子的感應(yīng)磁場(chǎng)與永磁轉(zhuǎn)子的交互作用來(lái)作用啟動(dòng)轉(zhuǎn)子的旋轉(zhuǎn)。若要再次參閱請(qǐng)點(diǎn)及上方動(dòng)畫(huà)視頻。同步電機(jī)內(nèi)的轉(zhuǎn)子之理論速度應(yīng)該與定子的RMF完全相同。(畢竟這是一臺(tái)同步電機(jī)) 我們可以使用數(shù)學(xué)和下面的公式來(lái)證明這個(gè)理論,并發(fā)現(xiàn)關(guān)于 MG 狀態(tài)的線索。它是根據(jù)轉(zhuǎn)子速度決定擔(dān)任電動(dòng)機(jī)還是擔(dān)任充電機(jī)嗎? 那我們?cè)撊绾斡?jì)算RMF及轉(zhuǎn)子速度?讓我們從RMF速度計(jì)算開(kāi)始。我們可以使用以下公式: 120*Freq(C) / Number of poles120代表我們的三相中每個(gè)相位相距的角度(120°)Frequency (C)代表通過(guò)相位的交流電流的頻率。Number of poles代表磁鐵的數(shù)量X2以得出極數(shù)(每一個(gè)磁鐵都有北極與南極)再次參閱我們的SSPs后,它表示轉(zhuǎn)子有5對(duì)磁組(10個(gè)磁極),我認(rèn)為定子也是如此!在下方畫(huà)面我們使用數(shù)學(xué)通道“120*freq(C)/10”來(lái)顯示出我們的RMF速度(同步速度)。
現(xiàn)在我們有了 RMF(其轉(zhuǎn)速稱為同步速度),我們現(xiàn)在可以藉由定子的感應(yīng)磁場(chǎng)與永磁轉(zhuǎn)子的交互作用來(lái)作用啟動(dòng)轉(zhuǎn)子的旋轉(zhuǎn)。若要再次參閱請(qǐng)點(diǎn)及上方動(dòng)畫(huà)視頻。同步電機(jī)內(nèi)的轉(zhuǎn)子之理論速度應(yīng)該與定子的RMF完全相同。(畢竟這是一臺(tái)同步電機(jī)) 我們可以使用數(shù)學(xué)和下面的公式來(lái)證明這個(gè)理論,并發(fā)現(xiàn)關(guān)于 MG 狀態(tài)的線索。它是根據(jù)轉(zhuǎn)子速度決定擔(dān)任電動(dòng)機(jī)還是擔(dān)任充電機(jī)嗎? 那我們?cè)撊绾斡?jì)算RMF及轉(zhuǎn)子速度?讓我們從RMF速度計(jì)算開(kāi)始。我們可以使用以下公式: 120*Freq(C) / Number of poles120代表我們的三相中每個(gè)相位相距的角度(120°)Frequency (C)代表通過(guò)相位的交流電流的頻率。Number of poles代表磁鐵的數(shù)量X2以得出極數(shù)(每一個(gè)磁鐵都有北極與南極)再次參閱我們的SSPs后,它表示轉(zhuǎn)子有5對(duì)磁組(10個(gè)磁極),我認(rèn)為定子也是如此!在下方畫(huà)面我們使用數(shù)學(xué)通道“120*freq(C)/10”來(lái)顯示出我們的RMF速度(同步速度)。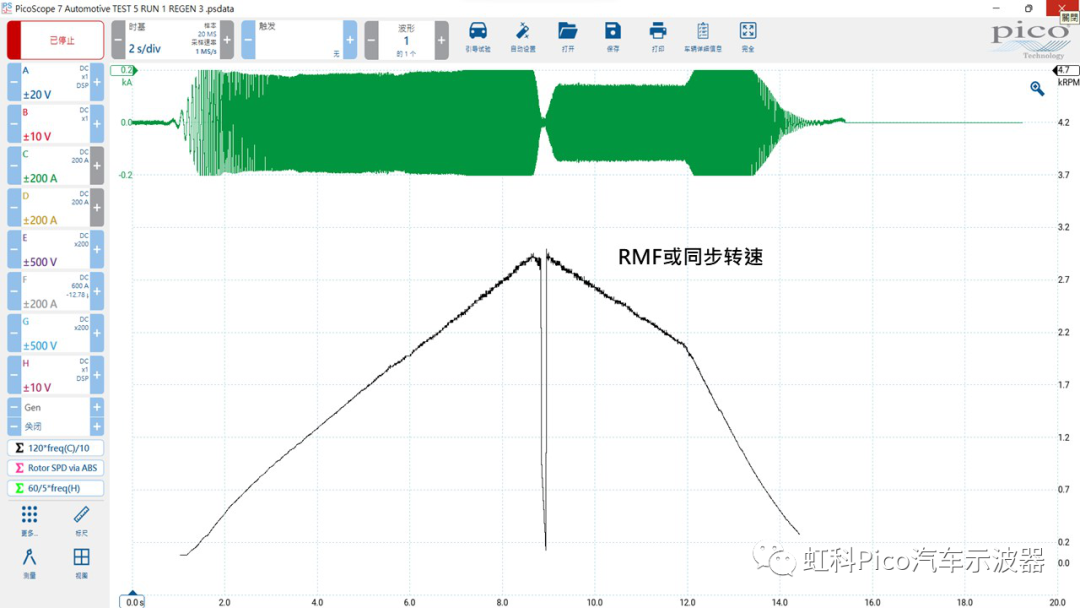 我們有幾種選擇來(lái)定義轉(zhuǎn)子速度,而我一開(kāi)始選擇用輪速乘上傳動(dòng)比。這就是我們的光學(xué)拾取器(通道B上)瞄準(zhǔn)到左驅(qū)動(dòng)軸的一塊反光帶之處,它會(huì)在車(chē)輪每轉(zhuǎn)一圈時(shí)產(chǎn)生一個(gè)脈沖。為了提高分辨率與精準(zhǔn)率,我在通道A增加了左驅(qū)動(dòng)輪的輪速傳感器信號(hào)。藉由使用來(lái)自驅(qū)動(dòng)輪的單一脈沖,我們現(xiàn)在可以計(jì)算輪速傳感器相對(duì)于車(chē)輪轉(zhuǎn)動(dòng)一圈的脈沖數(shù),我們以前使用過(guò)這種技術(shù),您可以在此(https://www.picoauto.com/library/case-studies/subaru-with-incorrect-abs-operation)閱讀有關(guān)它的信息。
我們有幾種選擇來(lái)定義轉(zhuǎn)子速度,而我一開(kāi)始選擇用輪速乘上傳動(dòng)比。這就是我們的光學(xué)拾取器(通道B上)瞄準(zhǔn)到左驅(qū)動(dòng)軸的一塊反光帶之處,它會(huì)在車(chē)輪每轉(zhuǎn)一圈時(shí)產(chǎn)生一個(gè)脈沖。為了提高分辨率與精準(zhǔn)率,我在通道A增加了左驅(qū)動(dòng)輪的輪速傳感器信號(hào)。藉由使用來(lái)自驅(qū)動(dòng)輪的單一脈沖,我們現(xiàn)在可以計(jì)算輪速傳感器相對(duì)于車(chē)輪轉(zhuǎn)動(dòng)一圈的脈沖數(shù),我們以前使用過(guò)這種技術(shù),您可以在此(https://www.picoauto.com/library/case-studies/subaru-with-incorrect-abs-operation)閱讀有關(guān)它的信息。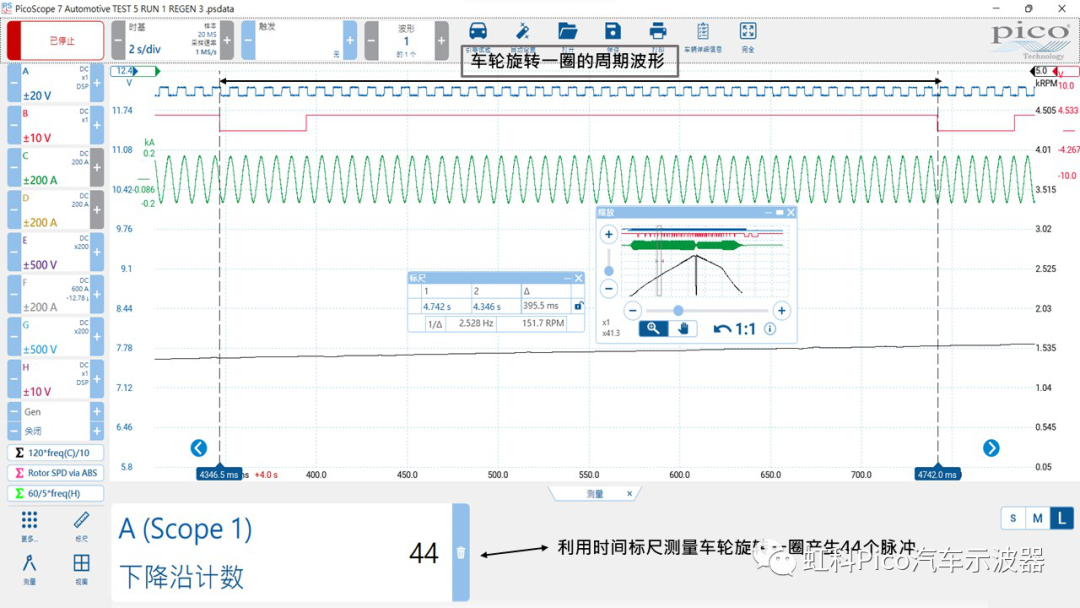 藉由使用PicoScope 7 Automotive中的“下降邊緣計(jì)數(shù)”測(cè)量功能(在上方畫(huà)面截圖中的時(shí)間標(biāo)尺之間),我們可以結(jié)論ABS輪速傳感器在每圈旋轉(zhuǎn)時(shí)拾取44個(gè)脈沖。因?yàn)槲覀冎繣-Golf的傳動(dòng)系統(tǒng)包含2.704:1的單齒輪比與3.608的最終傳動(dòng)比,我們統(tǒng)計(jì)全部的齒輪比等于2.704 x 3.608 = 9.756 :1我們現(xiàn)在可以藉由以下數(shù)學(xué)通道計(jì)算轉(zhuǎn)子轉(zhuǎn)速: (60/44*freq(A)/60)*9.756*6060/44*freq(A)表示輪胎的RPM,因?yàn)檩喫賯鞲衅髟诿恳晦D(zhuǎn)有44個(gè)脈沖。/60代表將RPM轉(zhuǎn)換成頻率(Hz)*9.756 代表透過(guò)傳動(dòng)比回算轉(zhuǎn)子的頻率*60 代表將轉(zhuǎn)子頻率轉(zhuǎn)換成RPM
藉由使用PicoScope 7 Automotive中的“下降邊緣計(jì)數(shù)”測(cè)量功能(在上方畫(huà)面截圖中的時(shí)間標(biāo)尺之間),我們可以結(jié)論ABS輪速傳感器在每圈旋轉(zhuǎn)時(shí)拾取44個(gè)脈沖。因?yàn)槲覀冎繣-Golf的傳動(dòng)系統(tǒng)包含2.704:1的單齒輪比與3.608的最終傳動(dòng)比,我們統(tǒng)計(jì)全部的齒輪比等于2.704 x 3.608 = 9.756 :1我們現(xiàn)在可以藉由以下數(shù)學(xué)通道計(jì)算轉(zhuǎn)子轉(zhuǎn)速: (60/44*freq(A)/60)*9.756*6060/44*freq(A)表示輪胎的RPM,因?yàn)檩喫賯鞲衅髟诿恳晦D(zhuǎn)有44個(gè)脈沖。/60代表將RPM轉(zhuǎn)換成頻率(Hz)*9.756 代表透過(guò)傳動(dòng)比回算轉(zhuǎn)子的頻率*60 代表將轉(zhuǎn)子頻率轉(zhuǎn)換成RPM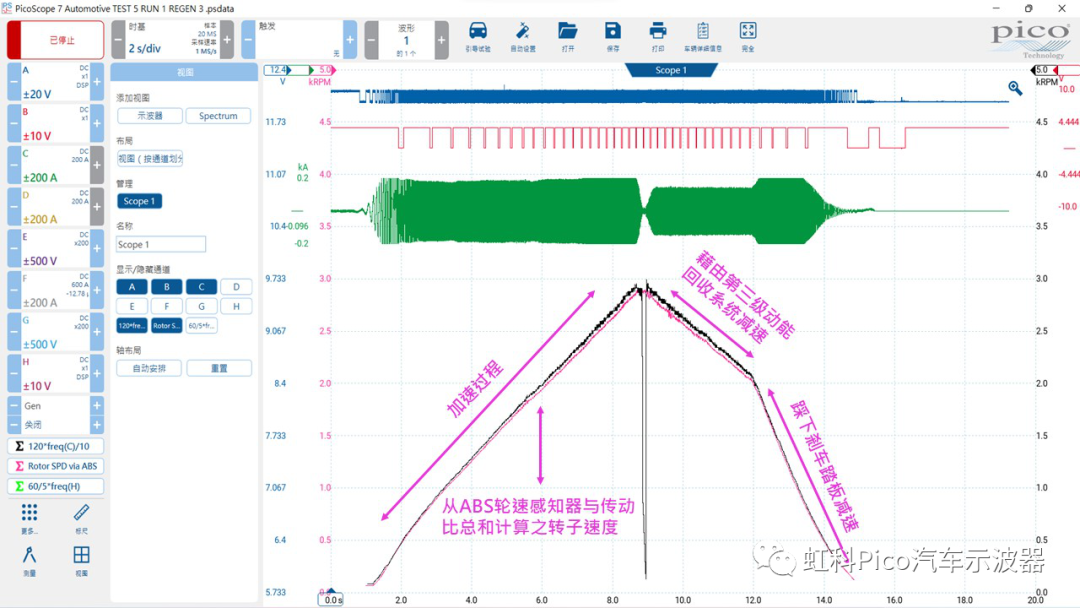 你可以看到上圖的畫(huà)面波型,我們從ABS輪速傳感器與總齒輪比計(jì)算的轉(zhuǎn)子速度明顯低于同步速度! 這與同步電機(jī)的特性形成反差并顯示了我們用此方式計(jì)算轉(zhuǎn)子速度需要考慮此變量。 通常此變量包含整體傳動(dòng)系統(tǒng)的公差累積與轉(zhuǎn)向誤差等等。
你可以看到上圖的畫(huà)面波型,我們從ABS輪速傳感器與總齒輪比計(jì)算的轉(zhuǎn)子速度明顯低于同步速度! 這與同步電機(jī)的特性形成反差并顯示了我們用此方式計(jì)算轉(zhuǎn)子速度需要考慮此變量。 通常此變量包含整體傳動(dòng)系統(tǒng)的公差累積與轉(zhuǎn)向誤差等等。
另一個(gè)測(cè)量轉(zhuǎn)子速度方式是使用集成式的轉(zhuǎn)子速度傳感器(VAG將其稱為”G713”)為此我們必須確定轉(zhuǎn)子速度傳感器相應(yīng)于轉(zhuǎn)子轉(zhuǎn)一圈時(shí)的電循環(huán)數(shù),但如何確定?這需要了解在SSPs530和527中描述的轉(zhuǎn)子磁極數(shù)的知識(shí),在此情況向如我先前提到的是十個(gè),并將極數(shù)除以2來(lái)確定轉(zhuǎn)子轉(zhuǎn)一圈的電循環(huán)數(shù),但為什么是除以2?這十個(gè)轉(zhuǎn)子磁極交替排列:北極,南極,北極,南極……。當(dāng)每個(gè)磁極被速度傳感器偵測(cè)(例如一個(gè)北極),它產(chǎn)生一個(gè)電壓輸出到個(gè)別的方向,造成我們一半的正弦波型。當(dāng)下一個(gè)交替的磁極(例如一個(gè)南極)被速度傳感器偵測(cè)時(shí),它產(chǎn)生一個(gè)相反方向的電壓輸出,造成另一半的正弦波型產(chǎn)生并完成一次電循環(huán)。因此每一個(gè)完整的電循環(huán)都必須藉由轉(zhuǎn)子傳感器通過(guò)兩個(gè)交替磁極來(lái)產(chǎn)生。因此,轉(zhuǎn)子每一轉(zhuǎn)的電循環(huán)數(shù)會(huì)等于轉(zhuǎn)子磁極數(shù)除以二(10)/2=5下圖的波型能幫助理解上方的敘述。注意,對(duì)這臺(tái)車(chē)輛,轉(zhuǎn)子速度傳感器的電循環(huán)與轉(zhuǎn)子總成是一致的。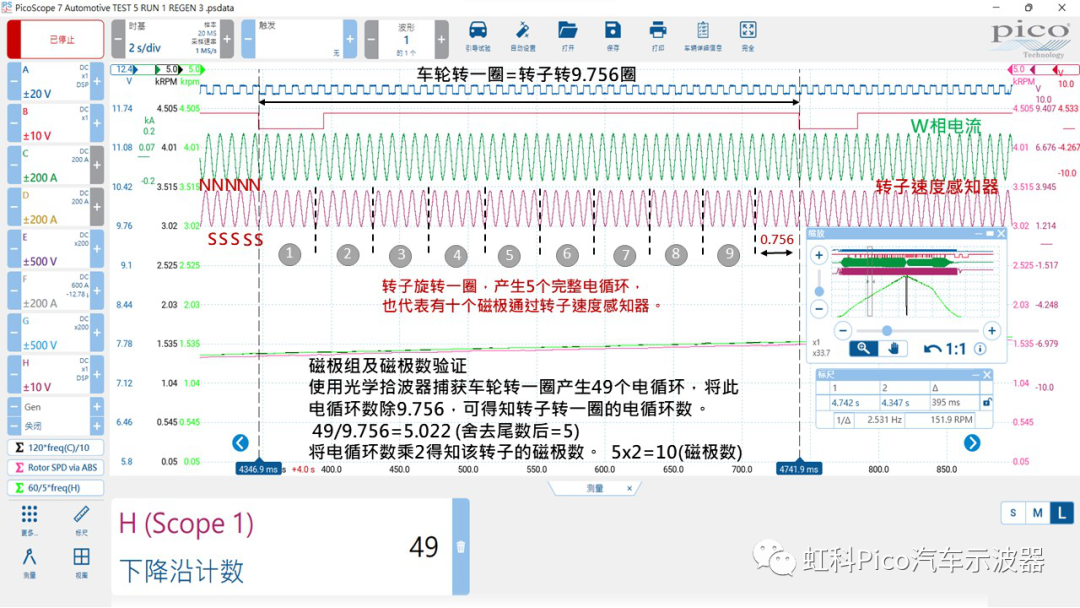 基于上述所說(shuō):如果我們知道轉(zhuǎn)子的磁極數(shù),我們可以使用該公式: 60/5*freq(H)。通道H是連接轉(zhuǎn)子速度傳感器。
基于上述所說(shuō):如果我們知道轉(zhuǎn)子的磁極數(shù),我們可以使用該公式: 60/5*freq(H)。通道H是連接轉(zhuǎn)子速度傳感器。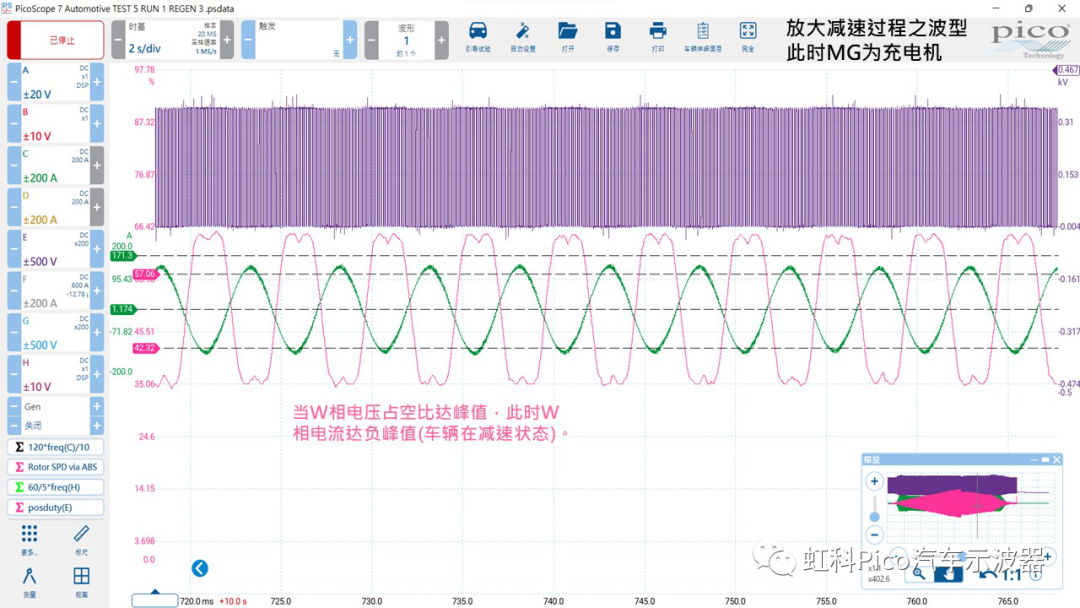 我想我們都能認(rèn)同上方數(shù)學(xué)通道的綠色波型,我們的轉(zhuǎn)子速度在加減速的期間確實(shí)等于我們的RMF速度。我們現(xiàn)在已經(jīng)確定這個(gè)電機(jī)確實(shí)是同步電機(jī)。繪制所有轉(zhuǎn)速和負(fù)載范圍內(nèi)的RMF與轉(zhuǎn)子速度(使用同步MG)將在談?wù)摰侥孀兤餍阅茉u(píng)估、定子完整性、轉(zhuǎn)子平衡與傳動(dòng)系統(tǒng)狀況時(shí)提供珍貴的數(shù)據(jù)數(shù)據(jù)。在這里我們正找尋在兩個(gè)數(shù)學(xué)通道間的一致性與同步性,任何〝丟失〞或循環(huán)誤差都將明顯影響關(guān)注的區(qū)域。關(guān)于循環(huán)誤差參閱Ben’s的“Martins’ Method(https://www.picoauto.com/library/training/the-martins-method)”文章。如果這是一個(gè)感應(yīng)異步電機(jī),在加速期間RMF速度將高于轉(zhuǎn)子速度,但在減速期間會(huì)低于轉(zhuǎn)子速度(一種稱為〝滑差〞的現(xiàn)象)。這個(gè)現(xiàn)象與特性可以被用來(lái)做為感應(yīng)異步電機(jī)MG狀態(tài)的指示(電機(jī)狀態(tài)或充電機(jī)狀態(tài)),但這并不適用于我們的同步電機(jī)。讓我們拉回原先的問(wèn)題:”我們?nèi)绾螐牟东@到的信息判斷MG現(xiàn)在是以電機(jī)運(yùn)行還是充電機(jī)運(yùn)行?” 假設(shè)你在高壓電池端的直流電纜沒(méi)有接電流鉗(上圖2)且你正在量測(cè)帶電流的單相電壓(參考高壓負(fù)極),那可以用〝相位〞來(lái)判斷。注意下面畫(huà)面截圖中的相電壓與電流的正占空比兩者間的關(guān)系,對(duì)比上圖3、4。
我想我們都能認(rèn)同上方數(shù)學(xué)通道的綠色波型,我們的轉(zhuǎn)子速度在加減速的期間確實(shí)等于我們的RMF速度。我們現(xiàn)在已經(jīng)確定這個(gè)電機(jī)確實(shí)是同步電機(jī)。繪制所有轉(zhuǎn)速和負(fù)載范圍內(nèi)的RMF與轉(zhuǎn)子速度(使用同步MG)將在談?wù)摰侥孀兤餍阅茉u(píng)估、定子完整性、轉(zhuǎn)子平衡與傳動(dòng)系統(tǒng)狀況時(shí)提供珍貴的數(shù)據(jù)數(shù)據(jù)。在這里我們正找尋在兩個(gè)數(shù)學(xué)通道間的一致性與同步性,任何〝丟失〞或循環(huán)誤差都將明顯影響關(guān)注的區(qū)域。關(guān)于循環(huán)誤差參閱Ben’s的“Martins’ Method(https://www.picoauto.com/library/training/the-martins-method)”文章。如果這是一個(gè)感應(yīng)異步電機(jī),在加速期間RMF速度將高于轉(zhuǎn)子速度,但在減速期間會(huì)低于轉(zhuǎn)子速度(一種稱為〝滑差〞的現(xiàn)象)。這個(gè)現(xiàn)象與特性可以被用來(lái)做為感應(yīng)異步電機(jī)MG狀態(tài)的指示(電機(jī)狀態(tài)或充電機(jī)狀態(tài)),但這并不適用于我們的同步電機(jī)。讓我們拉回原先的問(wèn)題:”我們?nèi)绾螐牟东@到的信息判斷MG現(xiàn)在是以電機(jī)運(yùn)行還是充電機(jī)運(yùn)行?” 假設(shè)你在高壓電池端的直流電纜沒(méi)有接電流鉗(上圖2)且你正在量測(cè)帶電流的單相電壓(參考高壓負(fù)極),那可以用〝相位〞來(lái)判斷。注意下面畫(huà)面截圖中的相電壓與電流的正占空比兩者間的關(guān)系,對(duì)比上圖3、4。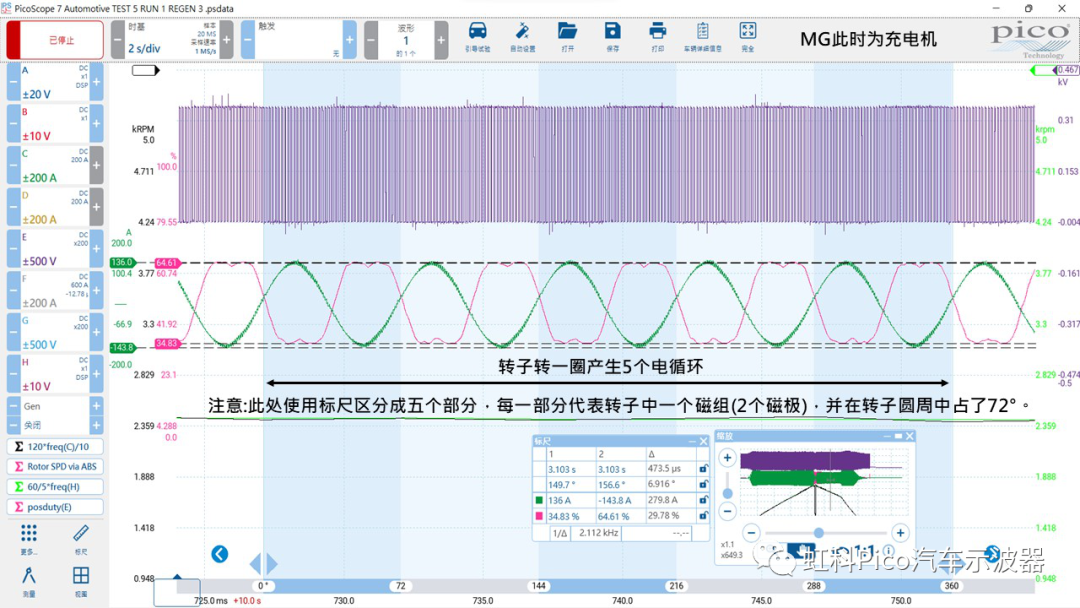 注意,數(shù)學(xué)通道“posduty(E)”顯示MG相位W電壓(約64%)的正占空比峰值控制為何與流經(jīng)相位繞組的負(fù)電流峰值(約 -143 A)相應(yīng)。相同的,我們的較低正占空比35%對(duì)應(yīng)到我們的電流峰值136A。這與我們的MG作為電機(jī)時(shí)的占空比情況完全相反,他們的相位已經(jīng)偏移了約180°!在以下的波型介紹了用相位標(biāo)尺將360°的轉(zhuǎn)子旋轉(zhuǎn)分成五個(gè)區(qū)域,每一個(gè)磁極相距72°,我們可以清楚看到相電壓和電流在正占空比之間的相位變化。由于我們的相位繞組電壓與電流的正占空比之間的關(guān)系(相位)顯示了MG(電機(jī)與充電機(jī))的運(yùn)行狀態(tài),如果我們可以簡(jiǎn)單繪制相位移動(dòng)而不是放大每個(gè)部分并量測(cè)相位,那就更好了。感謝我的同事Martyn準(zhǔn)備的數(shù)學(xué)通道。LowPass(Duty(((((atan(1/tan(pi*((posduty(E)-50)/10000)))/pi)+((posduty(E)-50)/10000))*-((atan(1/tan(pi*(C/10000)))/pi)+(C/10000)))+0.25))/0.555555555,10)我沒(méi)有打算解釋上述公式,它包含了ㄧ些低通濾波器、三角函數(shù)、正負(fù)載計(jì)算。 不幸的是當(dāng)這項(xiàng)數(shù)學(xué)通道套用到上方的捕獲數(shù)據(jù)后,由于通道C的錯(cuò)誤它并沒(méi)有成功繪制出數(shù)據(jù)。眼尖的人會(huì)發(fā)現(xiàn),在加減速過(guò)程中,會(huì)有電流超過(guò) 200 A 的“超出范圍”情況。在此情況下,數(shù)學(xué)通道無(wú)法執(zhí)行計(jì)算且導(dǎo)致數(shù)值無(wú)限大而無(wú)法繪制數(shù)據(jù)。 在對(duì)E-Golf的類似測(cè)試進(jìn)行搜尋時(shí),“TEST 8”有另一個(gè)加減速事件的所有的相電流都在范圍內(nèi)且額外增加高壓電池直流電壓的效益。(注意減速期間的增加)現(xiàn)在調(diào)整數(shù)學(xué)通道,我們正在查看通道A(相位繞組U的電壓正占空比)與通道D(相位繞組U的電流)相位: LowPass(Duty(((((atan(1/tan(pi*((posduty(A)-50)/10000)))/pi)+((posduty(A)-50)/10000))*-((atan(1/tan(pi*(D/10000)))/pi)+(D/10000)))+0.25))/0.555555555,10)
注意,數(shù)學(xué)通道“posduty(E)”顯示MG相位W電壓(約64%)的正占空比峰值控制為何與流經(jīng)相位繞組的負(fù)電流峰值(約 -143 A)相應(yīng)。相同的,我們的較低正占空比35%對(duì)應(yīng)到我們的電流峰值136A。這與我們的MG作為電機(jī)時(shí)的占空比情況完全相反,他們的相位已經(jīng)偏移了約180°!在以下的波型介紹了用相位標(biāo)尺將360°的轉(zhuǎn)子旋轉(zhuǎn)分成五個(gè)區(qū)域,每一個(gè)磁極相距72°,我們可以清楚看到相電壓和電流在正占空比之間的相位變化。由于我們的相位繞組電壓與電流的正占空比之間的關(guān)系(相位)顯示了MG(電機(jī)與充電機(jī))的運(yùn)行狀態(tài),如果我們可以簡(jiǎn)單繪制相位移動(dòng)而不是放大每個(gè)部分并量測(cè)相位,那就更好了。感謝我的同事Martyn準(zhǔn)備的數(shù)學(xué)通道。LowPass(Duty(((((atan(1/tan(pi*((posduty(E)-50)/10000)))/pi)+((posduty(E)-50)/10000))*-((atan(1/tan(pi*(C/10000)))/pi)+(C/10000)))+0.25))/0.555555555,10)我沒(méi)有打算解釋上述公式,它包含了ㄧ些低通濾波器、三角函數(shù)、正負(fù)載計(jì)算。 不幸的是當(dāng)這項(xiàng)數(shù)學(xué)通道套用到上方的捕獲數(shù)據(jù)后,由于通道C的錯(cuò)誤它并沒(méi)有成功繪制出數(shù)據(jù)。眼尖的人會(huì)發(fā)現(xiàn),在加減速過(guò)程中,會(huì)有電流超過(guò) 200 A 的“超出范圍”情況。在此情況下,數(shù)學(xué)通道無(wú)法執(zhí)行計(jì)算且導(dǎo)致數(shù)值無(wú)限大而無(wú)法繪制數(shù)據(jù)。 在對(duì)E-Golf的類似測(cè)試進(jìn)行搜尋時(shí),“TEST 8”有另一個(gè)加減速事件的所有的相電流都在范圍內(nèi)且額外增加高壓電池直流電壓的效益。(注意減速期間的增加)現(xiàn)在調(diào)整數(shù)學(xué)通道,我們正在查看通道A(相位繞組U的電壓正占空比)與通道D(相位繞組U的電流)相位: LowPass(Duty(((((atan(1/tan(pi*((posduty(A)-50)/10000)))/pi)+((posduty(A)-50)/10000))*-((atan(1/tan(pi*(D/10000)))/pi)+(D/10000)))+0.25))/0.555555555,10)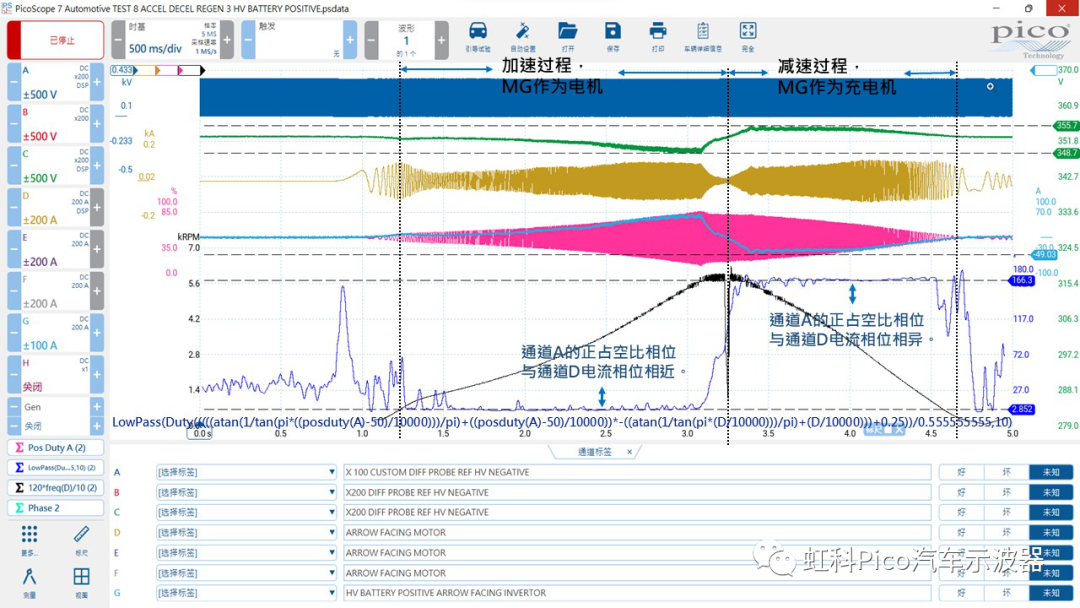 在以上畫(huà)面截圖可以看出相位繞組U的電壓正占空比(參考高壓負(fù)極)與相位繞組U的電流之間的相位移動(dòng)來(lái)判斷我們MG的狀態(tài)。 在以下畫(huà)面截圖中,我遮蔽了一些波形并移除一些標(biāo)尺來(lái)更清楚顯示相位移動(dòng)之值。
在以上畫(huà)面截圖可以看出相位繞組U的電壓正占空比(參考高壓負(fù)極)與相位繞組U的電流之間的相位移動(dòng)來(lái)判斷我們MG的狀態(tài)。 在以下畫(huà)面截圖中,我遮蔽了一些波形并移除一些標(biāo)尺來(lái)更清楚顯示相位移動(dòng)之值。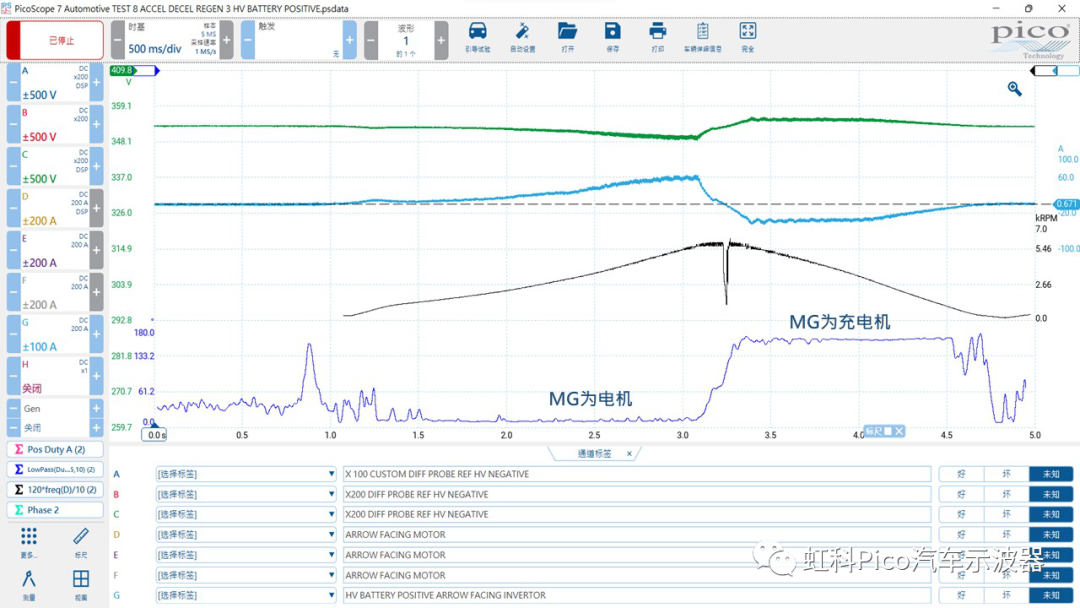 我希望這有幫助,隨著我們之后深入探討感應(yīng)異步電機(jī)后將會(huì)比較相關(guān)的研究結(jié)果及更多的文章內(nèi)容,我們有很多內(nèi)容可以一起學(xué)習(xí)討論。
我希望這有幫助,隨著我們之后深入探討感應(yīng)異步電機(jī)后將會(huì)比較相關(guān)的研究結(jié)果及更多的文章內(nèi)容,我們有很多內(nèi)容可以一起學(xué)習(xí)討論。
-
電機(jī)
+關(guān)注
關(guān)注
142文章
9024瀏覽量
145602
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論