") 【一等獎】RT-Thread創(chuàng)新應(yīng)用設(shè)計大賽作品
【一等獎】RT-Thread創(chuàng)新應(yīng)用設(shè)計大賽作品
作品地址:http://www.xsypw.cn/project/33798
作者:Mak_z
項(xiàng)目簡介:
使用基于RT-thread操作系統(tǒng)的AB32VG1開發(fā)板作為主控,對ov7670攝像頭進(jìn)行圖像采集,并使用串口發(fā)送圖片RGB565格式到PC供opencv進(jìn)行圖像識別。原項(xiàng)目設(shè)想在開發(fā)板上進(jìn)行采集的同時并通過簡單的二值算法和插值算法實(shí)現(xiàn)車牌號識別,但實(shí)踐中發(fā)現(xiàn)開發(fā)板的ram并不夠保存采集回來的圖像信息,與數(shù)據(jù)手冊中介紹的192k有一定差距,實(shí)現(xiàn)用戶能使用的ram是70k;同時原設(shè)想是帶lcd屏幕的,但最后發(fā)覺io口數(shù)量不夠,只能通過串口調(diào)試顯示,但lcd屏幕的 spi代碼仍保留在原碼中,可供參考。目前開發(fā)板通過攝像頭采集完整數(shù)據(jù)部分已經(jīng)完成,并且可以通過串口uart1發(fā)送到上位機(jī)進(jìn)行圖像顯示。識別號牌上位機(jī)需要另外再做。
硬件說明:
1.攝像頭ov7670帶fifo:采用csi總線的普通30w攝像頭。考慮到用模擬讀取攝像頭,io的反轉(zhuǎn)速度可能不能滿足高速采集的需要,因此保險起見,直接使用帶fifo的攝像頭。sccb總線采用全模擬的方式,跳過了所有中間層,直接操作寄存器,提高了總線的時鐘。

2.串口工具PL2302(ttl轉(zhuǎn)RS232),一款與pc通訊的串口工具,免驅(qū)。

3.總接線圖

軟件說明:
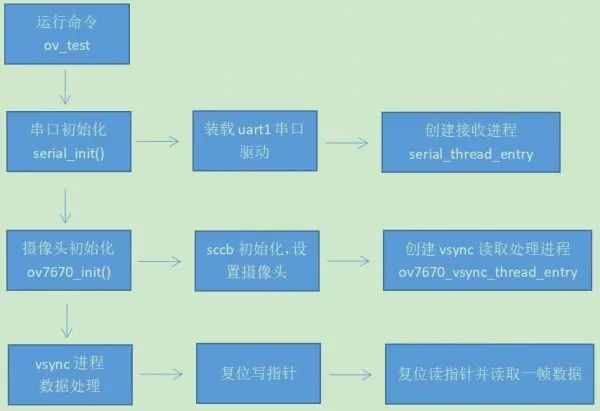
1.軟件流程圖
2.關(guān)鍵代碼
/* 攝像頭IO口采用直接操作寄存器的方式實(shí)現(xiàn),極大提升io速度 *//* sccb總線的初始化并設(shè)置ov7670相應(yīng)寄存器 */sccb_init();if(sccb_write_reg(0x12, 0x80) == RT_FALSE){return RT_FALSE;}rt_thread_delay(50);id1 = sccb_read_reg(0x0b);id2 = sccb_read_reg(0x0a);rt_kprintf("id1 = 0x%02x, id2 = 0x%02x\n", id1, id2);for(rt_uint16_t i = 0;i < sizeof(ov7670_init_reg_tbl) / sizeof(ov7670_init_reg_tbl[0]);i++){sccb_write_reg(ov7670_init_reg_tbl[0], ov7670_init_reg_tbl[1]);}/* 開啟攝像頭vsync掃描線程(沒有外部中斷因此改用輪詢的方式實(shí)現(xiàn)) */rt_thread_t thread;/* 查詢VSYNC線程 */thread = rt_thread_create("ov7670_vsync", ov7670_vsync_thread_entry, RT_NULL, 1024, 5, 100);if (thread == RT_NULL){rt_kprintf("ov7670_vsync thread create fail!\n");return RT_FALSE;}/* 啟動線程 */rt_thread_startup(thread);/* 提取hal庫實(shí)現(xiàn)了uart的數(shù)據(jù)發(fā)送函數(shù) */void uart1_send(rt_uint8_t *pbuf, rt_uint32_t len){for(rt_uint32_t i = 0;i < len;i++){hal_uart_clRFlag(UART1_BASE, UART_FLAG_TXPND);hal_uart_write(UART1_BASE, pbuf);while(hal_uart_getflag(UART1_BASE, UART_FLAG_TXPND) == 0);}}/* LCD底層驅(qū)動代碼,因?yàn)橐_不夠,所以無法演示,測試可用,另外程序里也配有寄存器版本的操作代碼 */static rt_uint32_t spi_bit_xfer(struct rt_spi_device *device, struct rt_spi_message *message){struct rt_spi_bit_ops *ops = (struct rt_spi_bit_ops *)device->user_data;rt_uint8_t tmp_buf[1024];rt_memset(tmp_buf, 0, sizeof(tmp_buf));if(message->send_buf == RT_NULL){message->send_buf = tmp_buf;}else if(message->recv_buf == RT_NULL){message->recv_buf = tmp_buf;}else{return RT_FALSE;}if (message->cs_take){ops->set_cs(ops->data, PIN_LOW);}message->length & SPI_DC ? ops->set_dc(ops->data, PIN_HIGH) : ops->set_dc(ops->data, PIN_LOW);message->length &= ~SPI_DC; /* 復(fù)原消息長度 */// rt_kprintf("message->length = %d\n", message->length);spi_rw_bytes(device, (rt_uint8_t *)message->send_buf, (rt_uint8_t *)message->recv_buf, message->length);if (message->cs_release){ops->set_cs(ops->data, PIN_HIGH);}}static const struct rt_spi_ops spi_bit_bus_ops ={RT_NULL,spi_bit_xfer};
優(yōu)化思路:
1. 由于ab32vg1沒有外部中斷可以使用,ov7670的幀同步信號vsync只有500us的高電平時間,因此為了捕捉到該信號,vsync線程一直占用很多的資源;
2. 串口與上位通訊的速度目前最快只有115200bps,上位機(jī)可以接受256000bps的速度,但將驅(qū)動改為256000bps后,接收會出現(xiàn)亂碼,因此串口使用的圖片數(shù)據(jù)非常緩慢。
項(xiàng)目演示

-
RT-Thread
+關(guān)注
關(guān)注
31文章
1305瀏覽量
40331
發(fā)布評論請先 登錄
相關(guān)推薦
主線科技榮獲全國人工智能應(yīng)用場景創(chuàng)新挑戰(zhàn)賽一等獎
中興通訊榮獲第七屆“綻放杯”全國一等獎
天合光能榮獲光伏組件回收專題賽一等獎
廣電計量牽頭項(xiàng)目獲得中國商業(yè)聯(lián)合會服務(wù)業(yè)科技創(chuàng)新獎一等獎
大華股份榮獲中國創(chuàng)新方法大賽一等獎
國科微榮獲音視頻領(lǐng)域關(guān)鍵技術(shù)突破一等獎
大華股份榮獲2024年中國創(chuàng)新方法大賽一等獎
一等獎!RT-Thread嵌入式操作系統(tǒng)亮相世界互聯(lián)網(wǎng)大會

行易道榮獲2024“隅翼杯”創(chuàng)新創(chuàng)業(yè)大賽一等獎
北京協(xié)和醫(yī)院攜手云知聲榮獲2024全國智慧醫(yī)保大賽一等獎
錦浪科技榮獲中國電力科學(xué)技術(shù)進(jìn)步一等獎
摩爾線程榮獲2024海淀高價值專利培育大賽一等獎
錦浪科技榮獲上海市技術(shù)發(fā)明一等獎
埃瓦科技榮獲第七屆西電全球校友創(chuàng)新創(chuàng)業(yè)大賽一等獎
一等獎!首屆中部六省高價值專利授獎,本源量子上榜






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論