") 場景采集感知測評軟件 INTEWORK-ARS
場景采集感知測評軟件 INTEWORK-ARS
概述
工欲善其事,必先利其器。在“軟件定義汽車”的新時代下,開發(fā)者們總結(jié)了一條適用于自動駕駛的開發(fā)流程,這條開發(fā)線路大致包括實車數(shù)據(jù)采集->數(shù)據(jù)存儲->數(shù)據(jù)處理->數(shù)據(jù)分析->數(shù)據(jù)標注->模型訓練->仿真測試->實車測試->部署發(fā)布等關(guān)鍵環(huán)節(jié),通過不斷開發(fā)迭代,逐步完善自動駕駛的能力。
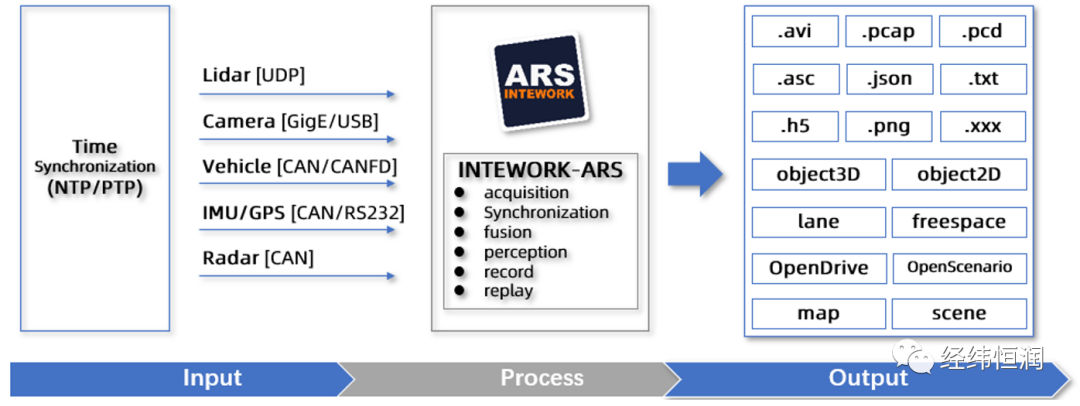
INTEWORK-ARS是經(jīng)緯恒潤自主研發(fā)的智能駕駛場景采集感知測評軟件,具有多個軟件模塊,可提供給使用者進行原始數(shù)據(jù)采集、傳感器標定、感知計算、數(shù)據(jù)集生成、傳感器測評、場景生成等相關(guān)開發(fā)應用。
主要功能
數(shù)據(jù)同步采集
傳感器標定
目標級數(shù)據(jù)計算
駕駛場景檢測
快速標注
傳感器目標檢測及跟蹤能力測評
場景生成
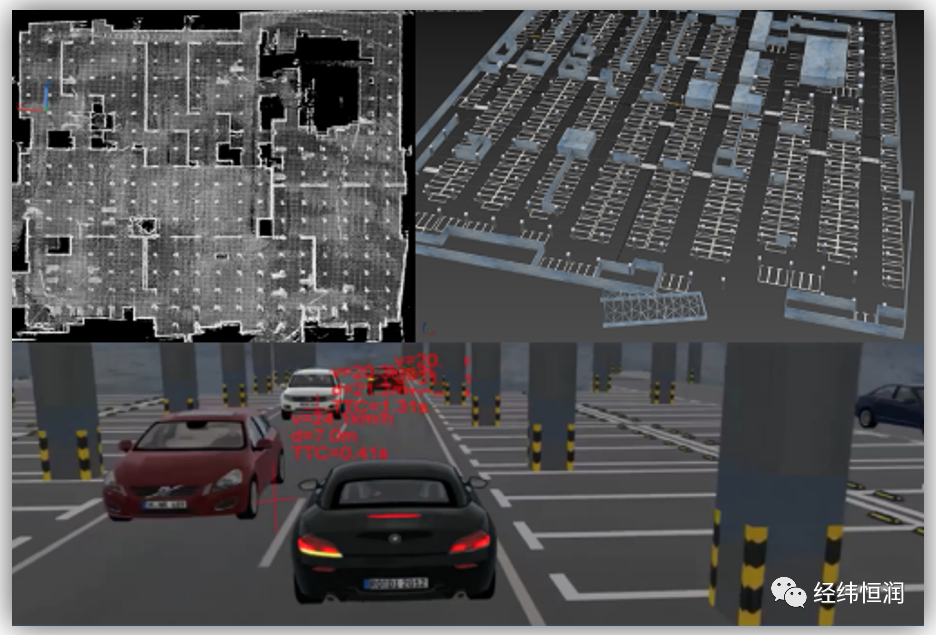
智能駕駛場景數(shù)據(jù)采集模塊
該模塊功能包括原車數(shù)據(jù)和后裝傳感器數(shù)據(jù)的采集,通過一套有效的同步機制保證數(shù)據(jù)同步性,并能有效保存原始數(shù)據(jù)、目標數(shù)據(jù)和輔助數(shù)據(jù),提供相應的傳感器布置方案和供電系統(tǒng)。

傳感器標定模塊
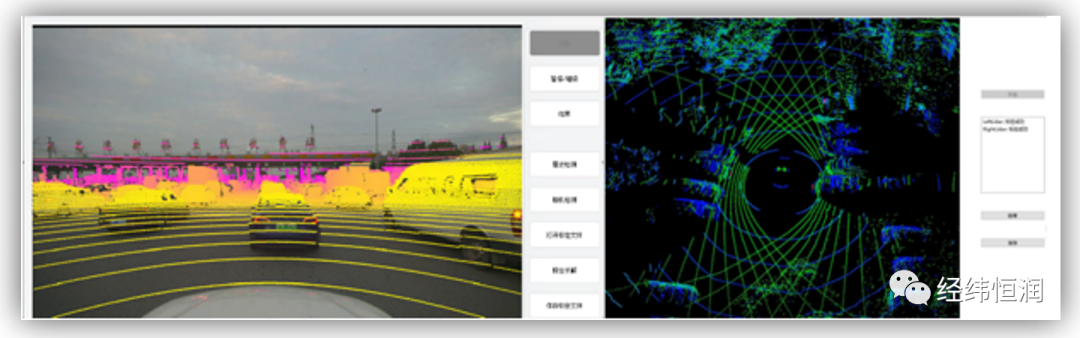
傳感器標定模塊,可以快速便捷地通過可視化交互,對相機、雷達、多傳感器間的相關(guān)參數(shù)進行標定,獲得標定數(shù)據(jù)及文件,滿足在線及離線使用需求。
激光雷達外參數(shù)標定
多激光雷達標定
相機內(nèi)外參數(shù)標定
激光雷達與相機聯(lián)合標定
感知計算模塊
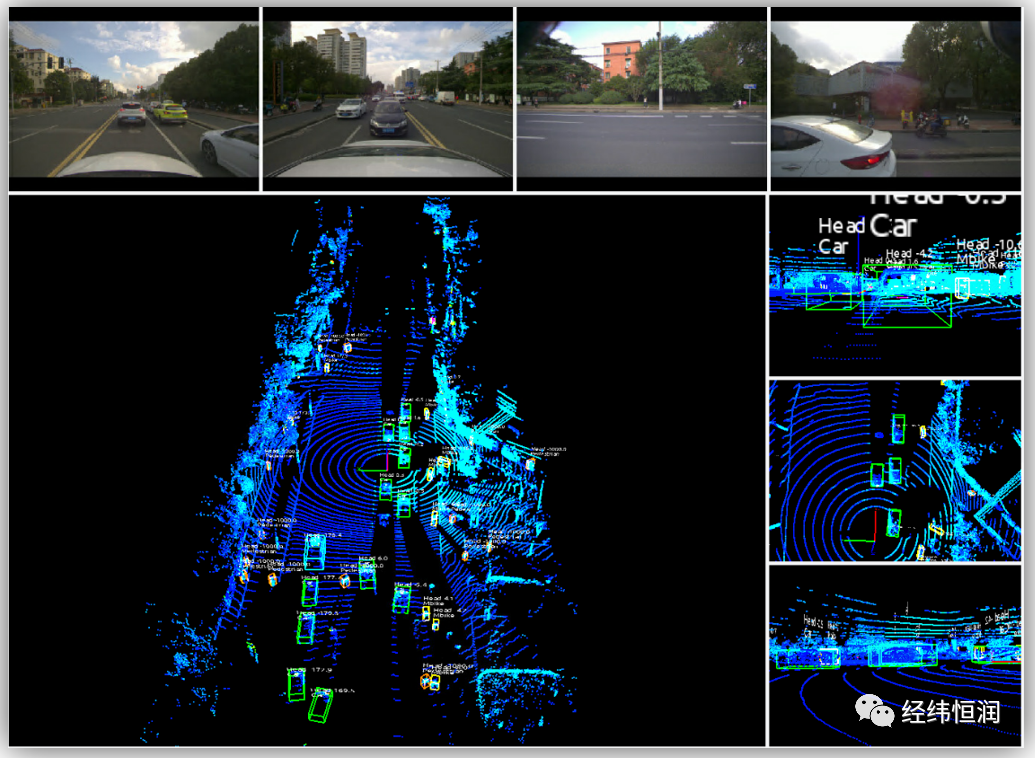
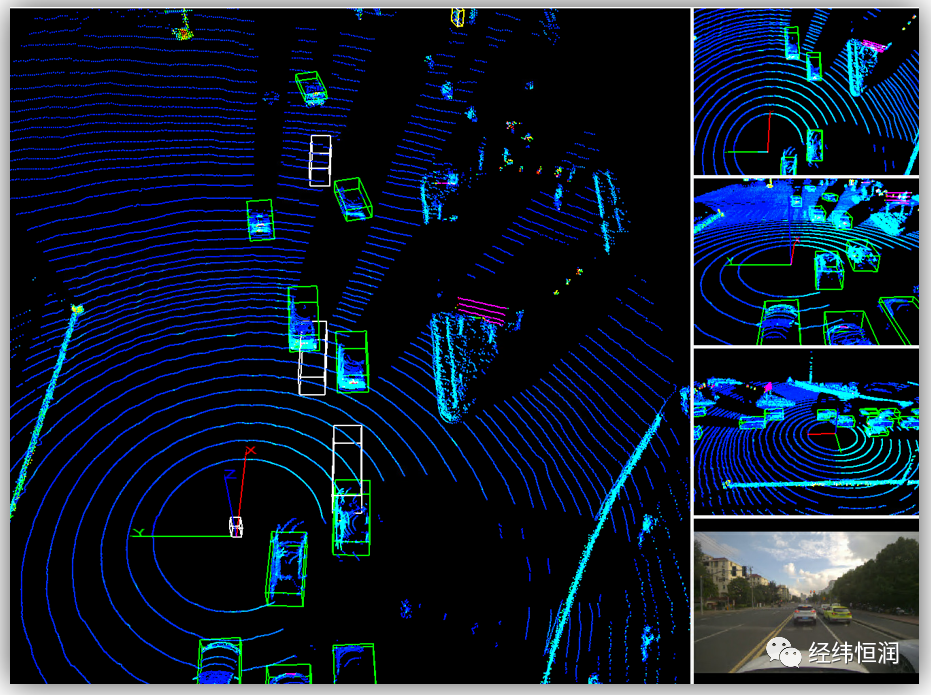
激光雷達點云、相機圖像等傳感器原始數(shù)據(jù),經(jīng)過感知計算模塊,可以獲得目標級數(shù)據(jù)信息。
動態(tài)目標檢測
靜態(tài)場景檢測
可行駛區(qū)域檢測
相機雷達融合目標檢測
統(tǒng)一數(shù)據(jù)集
全局信息輸出

激光雷達3D目標標注模塊
激光雷達3D目標標注模塊可以加載預標注標簽,對目標信息進行交互式增刪改查,生成標簽數(shù)據(jù),用于使用者后續(xù)的訓練、測試、測評等需求。
顯示目標及屬性
視角選擇
自動關(guān)聯(lián)標注
點云可視化操作
便捷式人機交互操作
傳感器目標感知能力測評模塊
該模塊可對待測傳感器的目標檢測和跟蹤能力進行快速測評,獲得能力指標,滿足使用者在產(chǎn)品對標、性能驗證等環(huán)節(jié)的工具需求。
目標檢測能力
多目標跟蹤能力
目標匹配結(jié)果
目標屬性誤差
場景生成模塊
將實車采集的智能駕駛場景數(shù)據(jù),快速生成OpenScenario和OpenDrive文件,滿足使用者后續(xù)的仿真應用需求。
在近年的工程應用中,經(jīng)緯恒潤的相關(guān)產(chǎn)品已經(jīng)在國內(nèi)眾多整車廠及智能駕駛開發(fā)團隊的項目應用中得到了實踐檢驗。經(jīng)緯恒潤歡迎廣大開發(fā)者一起參與到相關(guān)產(chǎn)品和技術(shù)的開發(fā)應用過程中,繼續(xù)為汽車電子開發(fā)貢獻一份力量。
相關(guān)鏈接 (直接點擊進入)
1 | AUTOSAR 解決方案 — INTEWORK-EAS-CP |
2 | 智能駕駛車輛功能安全測試解決方案 |
3 | 面向軟件模塊的整車E/E架構(gòu)開發(fā)咨詢服務 |
4 | 面向部件的整車E/E架構(gòu)開發(fā)咨詢服務 |
5 | 面向服務的整車E/E架構(gòu)(SOA)開發(fā)咨詢服務 |
6 |
經(jīng)緯恒潤擁有一支人數(shù)眾多、經(jīng)驗豐富、技術(shù)專業(yè)的咨詢團隊,深耕行業(yè)十幾年,累計為國內(nèi)500多家OEM及供應商提供了專業(yè)的咨詢服務和工具產(chǎn)品。立足自主,放眼未來,經(jīng)緯恒潤將緊跟汽車電子行業(yè)自主創(chuàng)新發(fā)展趨勢,竭盡所能,為民族汽車工業(yè)的發(fā)展貢獻綿薄之力。
-
軟件
+關(guān)注
關(guān)注
69文章
4990瀏覽量
87842
發(fā)布評論請先 登錄
相關(guān)推薦
智能駕駛數(shù)據(jù)采集回注測評工具 - ARS
Bootloader解決方案—INTEWORK-EAS-Boot

南方測繪多款實景三維軟件產(chǎn)品通過官方測評
?振弦采集儀的應用場景有哪些
測試新體驗 | 車載網(wǎng)絡測試套件INTEWORK-ANTP

&quot;讓工作更簡單智能&quot; - 經(jīng)緯恒潤自主研發(fā)INTEWORK系列工具

康謀技術(shù) | 高效環(huán)境感知:毫米波雷達數(shù)據(jù)采集、可視化及存儲方案

經(jīng)緯恒潤INTEWORK-VBA新版本正式發(fā)布
數(shù)據(jù)采集網(wǎng)關(guān)的功能和應用場景

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
經(jīng)緯恒潤INTEWORK-EAS產(chǎn)品成功適配芯來RISC-V處理器NA內(nèi)核

長城汽車攜手軟件測評中心打造整車全鏈路智能化的深度測試模式

毫米波雷達為智慧感知賦能,創(chuàng)新引領(lǐng)園區(qū)發(fā)展新潮流 #毫米波雷達感知應用 #智慧園區(qū) #感知應用場景解決方案
KEYSIGHT是德科技34970A采集軟件的使用

INTEWORK—PET 汽車軟件持續(xù)集成平臺






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論