 我們又改了一版機器人的脖子
我們又改了一版機器人的脖子
什么是機器人的脖子
機器人的脖子,一般是這樣的:
Robot Fedor

Robot Reachy
Robot Digit

以上三種形態,一種是串聯二自由度,一種是并聯二自由度,要么就是完全沒有脖子。
“機器人的脖子”實際上就是搭載在機器人軀干上的傳感器云臺。
根據機器人執行的任務不同,通常我們會在機器人頭部配置不同類型的傳感器,例如多線激光、面陣激光、深度攝像頭等。
而這些傳感器本身由于視角有限的原因,往往需要通過云臺這種方式去擴展機器人的感知范圍。
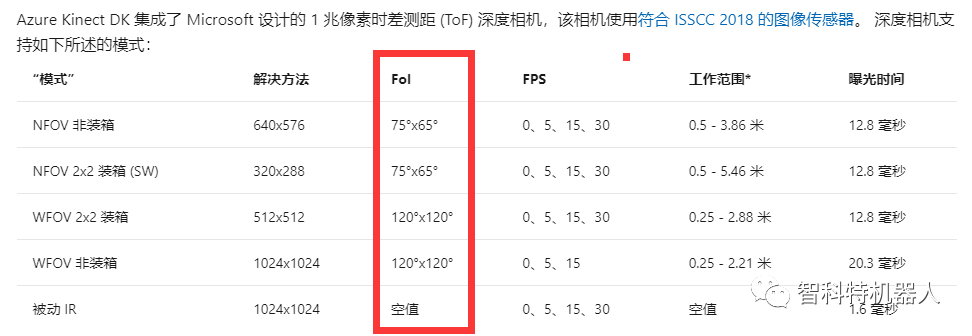
Kinect DK參數
而一款能搭載多種傳感器,兼容ROS的傳感器的云臺就顯得那么的必要了!
所以為了解決問題,我們智科特工程師連夜迭代了三版云臺,如今第三版終于進入了規模量產環節!
 為什么要做一款傳感器云臺
為什么要做一款傳感器云臺
客戶需求強烈
產品源于需求而又高于需求。
很多客戶都跟我們提過,想要一款價格便宜量又足的機器人云臺,但是現在市面上的云臺產品,要么不開源(不兼容ROS),要么負載不夠,要么價格太貴。當時一個項目上,客戶需要旋轉和俯仰Kinect2,于是我們的宗義師兄就做了一個最初版,后來陸陸續續有客戶需要,就繼續迭代下去了,最近剛完成第三版的量產。
國外的產品太貴
以性價比為基準,卷到國外去!
這種傳感器云臺的產品也不是沒有,很早之前FLIR就有PTU系列,也開放API接口,但是價格好像兩三萬一個,秉承著“錢不能都讓他們掙了,我們也要做一個卷到國外去”的想法,怎么也要讓我們同胞在考慮云臺的時候有選擇的余地。

FLIR PTU云臺
迭代的路徑



我們到現在一共迭代了三版,第一版把初步功能實現,第二版改進了對稱結構,優化了量產能力。第三版整體體積進行了縮小,負載增大,往量產又走了一步。
在完成第二版的時候,我們就用這個產品做了許多應用,比如:雙臂機器人頭部、移動機器人感知模塊等。第二版的云臺陸陸續續賣了五十多套,然后啟動的第三版改版。
 第三代云臺參數表:
第三代云臺參數表:
| 參數 | 值 |
| 運動范圍 | 旋轉:±60°,俯仰:±60° |
| 控制精度 | 0.05° |
| 最大運動速度 | 30°/s |
| 功耗 | 工作:15w,待機:0.3w |
| 通信接口 | USB Type-c,RS485 |
| 電源輸入 | 12V 2A(DC 5.5×2.1) |
| 整機質量 | 1.1kg |
| 設計負載 | 1kg |
| 尺寸 | 140×70×117mm |
| 包裝尺寸 | 243×152×91mm |
-
機器人
+關注
關注
211文章
28455瀏覽量
207263
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
機器人的語音功能
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
地瓜機器人發布一系列通用機器人套件
Al大模型機器人
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
巡檢機器人有哪些功能和作用?






 工商網監
工商網監
評論