 小米CyberDog四足機器人的AI運動系統的實現
小米CyberDog四足機器人的AI運動系統的實現
2021年8月10日,雷軍進行繼宣布造車之后的第二次演講。
在現場的展示中,小米發布了首款四足行走機器人——鐵蛋,英文名CyberDog。這只“人類高質量寵物”可以行走、站立、小碎步跳舞等等。
鐵蛋現場展示
在官方給出的運動性能參數中,介紹到,除了這些,CyberDog還支持恢復站立、姿態展示、緩慢趴下、緩跑、小跑、奔跑、跳跑、跳躍、倒地恢復、打滾、握手、跳舞、轉圈、作揖、坐下等一系列功能動作。
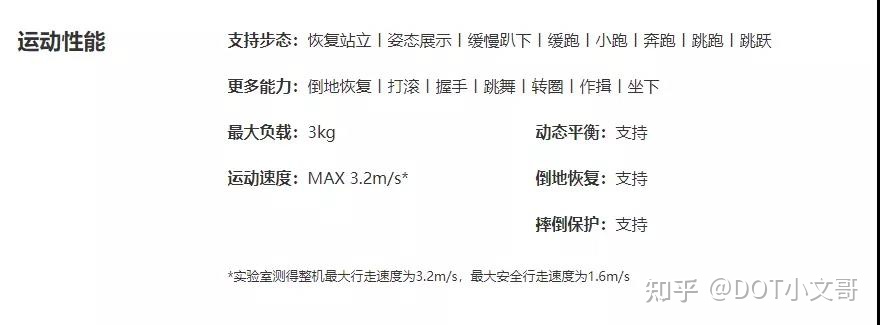
小米官網對于鐵蛋運動性能的介紹
這只看起來像小狗的機器人其實是當前業內備受關注的新產品形態——仿生四足機器人。CyberDog全身擁有11組高精度傳感器時刻待命,可主動探測外部細微變化,它搭載了AI超級計算機——NVIDIA JETSON XAVIER NX平臺,可處理來自多個傳感器的海量數據。于此同時,CyberDog使用了自研的高性能伺服電機,通過全志MR813芯片對全身的運動模塊進行控制。
如果把傳感器組比作CyberDog的“眼睛”,那NVIDIA JETSON XAVIER NX就是它的“大腦”,伺服電機就是它的“肌肉”,Allwinner MR813就是“小腦”。
下面就來剖析鐵蛋的各個“器官”是如何組成它的運動系統的。
#01 大腦-英偉達主控
CyberDog 的“大腦”是英偉達的 Jetson Xavier NX 平臺,這是一臺用于嵌入式和邊緣系統的 AI 超級計算機。它集成了6個core NVIDIA Carmel ARM v8.2 64-bit CPU、搭載 384 NVIDIA CUDA cores 和 48 Tensor cores的GPU、2個 NVDLA 引擎深度學習加速器、7路VLIW視覺處理器。可以提供最高21T的算力。這保證了 CyberDog 可以毫無障礙地處理從傳感器系統捕獲的大量數據,準確領會主人的意圖。同時支持2個 MIPI CSI-2 D-PHY lanes、以太網、WIFI/BT、HDMI、多路USB等。
有了這個大腦,這臺機械狗甚至可以直接外接顯示輸入設備變身一臺“電腦”,當然并不是我們傳統意義上使用的那種個人用電腦,而是用于開發等用途。
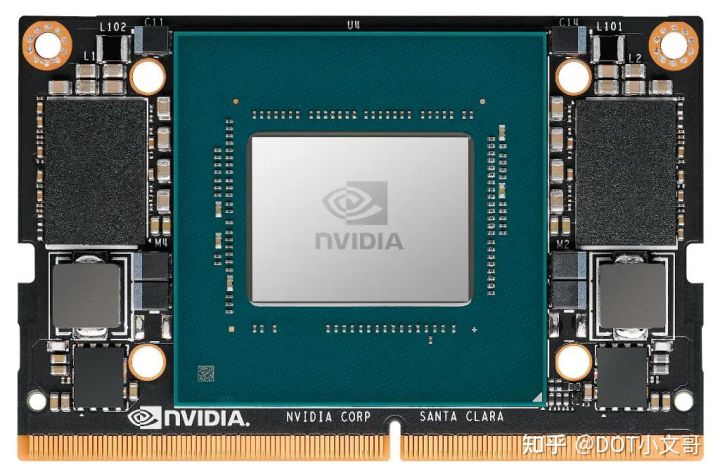 Nvidia Jetson Xavier NX
Nvidia Jetson Xavier NX# 02 眼睛-11組高精度傳感器
為了讓鐵蛋真的像一條狗,小米為其配備了超過11組高精密傳感器,包括Intel Realsense D450深度攝像頭、AI交互相機、雙目超廣角相機、TOF傳感器、環境光傳感器、超聲波傳感器、慣性測量單元、GPS模組、地磁傳感器、光流計、6MIC環型陣列、觸摸傳感器等。有了這些豐富的傳感器,CyberDog就像一個擁有白眼的“感知型忍者”,可以敏銳地感覺都周圍流動的“查克拉”,并做出避障、預警等行為。
不僅僅是堆砌硬件,小米手機影像部門還親自介入,將自己在手機方面深耕多年影像的技術運用至四足機器人領域,將硬件的性能發揮到極致。比如CyberDog的自主跟隨能力就是源自人臉識別技術的衍生,以及SLAM建圖和導航避障功能都來自影像技術的延伸的視覺探知技術,CyberDog通過影像技術感知環境后,通過算法創建出地圖并導航,最終規劃出最優路線。

#03 肌肉-自研伺服電機
CyberDog全身的自由度是12,單腿的自由度是3,即每只腳大腿關節處有兩個電機,小腿關節處有一個電機,共12個電機。12個電機的組合讓CyberDog可以自由地做出奔跑、跳躍、空翻等高難度動作。據悉,這12個伺服電機均由小米自研,單個最大扭矩達32N·m,最大轉速為220rpm,可以讓這只14KG重的CyberDog以11.5km/h的速度前進,這個速度大概和一個普通人晨跑的速度相當,讓主人帶著CyberDog跑步遛狗成為可能。
 伺服電機性能參數
伺服電機性能參數#04 小腦-全志MR813
CyberDog“小腦”使用的國內知名芯片設計廠商全志科技的Allwinner MR813。MR813將負責MPC算法的執行、運動控制、電源系統管理和OTA系統管理等工作。即CyberDog的四只腳以及上面的12個伺服電機,都將在MR813的控制下有序地行動,讓CyberDog不會出現順拐或者“撲街”。
MR813是全志針對運動機器人市場推出的高性能SoC,4核A53架構,主頻高達1.6GHz,擁有豐富的音視頻接口和運動驅動接口。
據悉,MR系列芯片已經在在掃地機器人產品上被廣泛應用,其中包括小米、石頭、追覓等知名廠商。本次CyberDog使用MR813也是復用追覓已經成熟的運動驅動模塊,這樣可以保證產品的性價比、穩定性和可量產性。
也就是說,MR813在其它產品上都是作為“大腦”,而在CyberDog中只用作“小腦”,可見MR813性能的強大,也透露出小米對CyberDog用料選項的踏實和良心。
CyberDog的MPC算法使用的則是知名開源四足MPC算法 MIT Mini Cheetah。對于仿生四足機器人MPC算法的研究一直是近年的熱點。MIT這套算法廣受開發者歡迎,許多DIY開發者甚至專業廠商,都會基于這套算法進行開發。MR813則是為算法的運行提供了一個高效穩定的環境。
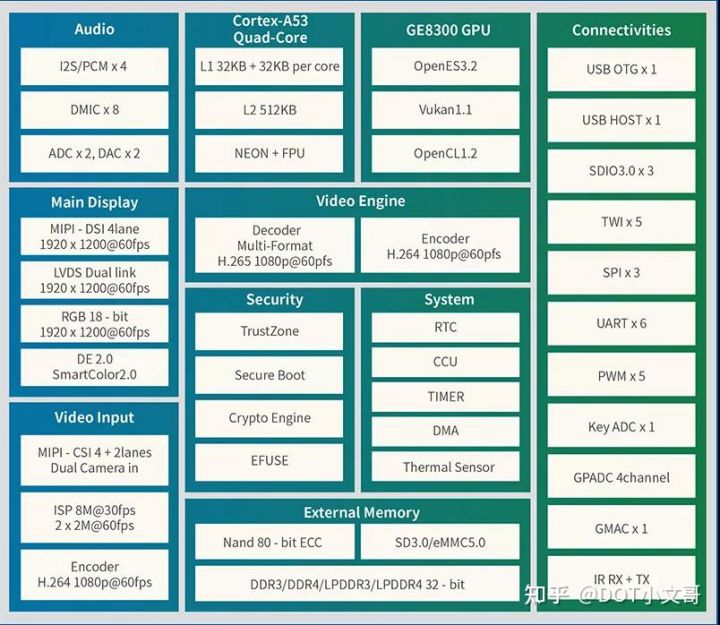 MR813系統框圖
MR813系統框圖 米家掃地機器人1T,使用MR813作為“大腦
米家掃地機器人1T,使用MR813作為“大腦”
#05 神經系統-系統整合
在整體系統框架方面,CyberDog使用的是主流的機器人開源架構ROS 2,它提供一系列程序庫和工具以幫助軟件開發者創建機器人應用軟件,同時提供了硬件抽象、設備驅動、庫函數、可視化、消息傳遞和軟件包管理等諸多功能。
其中,Jetson Xavier NX 運行的是Ubuntu 18.04操作系統,11組高性能傳感器獲取到的環境信息傳到Jetson Xavier NX后,由Jetson Xavier NX進行處理,并將運動信息通過千兆網口下發到MR813,由MR813進行運動總控制,分別控制一個MCU進行OTA和電池包的管理和另一個MCU進行電機的控制,與12個高性能伺服電機通過CAN 2.0進行通信。
在整體系統框架方面,CyberDog使用的是主流的機器人開源架構ROS 2,它提供一系列程序庫和工具以幫助軟件開發者創建機器人應用軟件,同時提供了硬件抽象、設備驅動、庫函數、可視化、消息傳遞和軟件包管理等諸多功能。
其中,Jetson Xavier NX 運行的是Ubuntu 18.04操作系統,11組高性能傳感器獲取到的環境信息傳到Jetson Xavier NX后,由Jetson Xavier NX進行處理,并將運動信息通過千兆網口下發到MR813,由MR813進行運動總控制,分別控制一個MCU進行OTA和電池包的管理和另一個MCU進行電機的控制,與12個高性能伺服電機通過CAN 2.0進行通信。
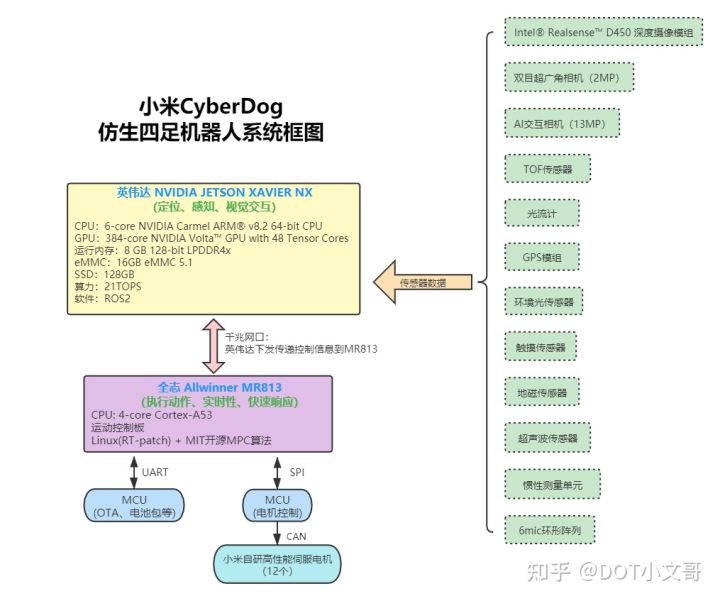 小米CyberDog系統框圖
小米CyberDog系統框圖#市場前瞻
目前仿生領域四足機器人研究最成熟的研發團隊當屬波士頓動力,旗下研發的“大狗”系列仿生機器人已經有十幾個產品型號分支,但售價卻達到了驚人的7.5萬美元(約合人民幣48萬),這個價格讓很多普通消費者都望而卻步。

今年 6 月,國內的宇樹科技發布了 Unitree GO1,共有三個版本:售價 2700 美元的 G01 Air base 型號、售價 3500 美元的 G01 和售價 8500 美元的 G01 Edu,這個價格可以說率先打開了四足機器人在普通消費人群中的市場,不過礙于功能的不足,依然難以進入大眾眼界。
也就是說,Unitree GO1 起步價僅需 1.6 萬元人民幣,然而這個價格紀錄目前已被小米9999的CyberDog打破了。
但是從目前供應鏈獲取到的信息來看,Jetson Xavier NX核心模塊的市場報為3000+元,Intel Realsense D450深度攝像頭的市場報價約為1500元,這兩個關鍵元器件的成本,就已經接近CyberDog硬件成本的一半。全志的芯片雖然一直以高性價比著稱,但是作為一個掃地機器人大腦級別的芯片,再加上12個伺服電機、電池、金屬外殼等材料,CyberDog 賣9999元的價格,真的是“交個朋友”了。截止2021年8月底,CyberDog 產品雖然未交貨,但是已經有人以數倍的價格收購名額了。
小米副總裁常程在微博對于“為什么要做這樣一個機器人”的問題是這樣回應的:
“這還是一項投資未來的決策。
一方面仿生機器人未來在服務、工程、安防、醫療等諸多領域蘊含著巨大的市場潛力。另一方面小米作為全球化的科技公司,有必要盡早在前沿領域進行幾乎布局,夯實專利儲備。探索仿生機器人的過程也是在做技術預研,其中機器視覺、導航避障、人機交互、AI語音算法等技術可以反哺手機、智能家居等產品。”
與此同時,我們在這個產品中看到了小米強大的模塊整合能力,在項目中,分別調動了核心的手機影像部門、小愛同學AI部門、語音算法部門、生態鏈公司追覓、芯片原廠全志科技等眾多部門、合作伙伴,從概念設計到機械結構設計、BSP、算法移植、系統聯調到最終產品交付,只用了10個月的時間。
上一次我們看到這樣集全集團之力去做一個玩具的場景,是《四驅兄弟》里的三國藤吉集合三國重工最高科技而打造他的疾速眼鏡蛇。而這些模塊其實也是自動駕駛會用到的技術熱點,結合之前宣布造車的消息,外界猜測,CyberDog其實是在為小米汽車的團隊搭建和技術預研做準備。
-
小米
+關注
關注
70文章
14364瀏覽量
144388 -
全志
+關注
關注
24文章
249瀏覽量
53171
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
開源項目!OpenCat—— 一個全能的平價四足機器人
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
【CW32開發】初探四足機器人

在NVIDIA Isaac Lab中訓練四足機器人運動

Al大模型機器人
ABB工業機器人運動指令有哪幾個
運動控制和機器人系統有什么區別
小米機器人入駐小米汽車工廠,已研發鐵大、鐵蛋等機器人
銀牛微電子3D視覺感知方案賦能小米CyberDog系列仿生四足機器人
基于樹莓派的四足噴水機器人設計






 工商網監
工商網監
評論