") 在自動(dòng)駕駛中,如何進(jìn)行汽車毫米波雷達(dá)測(cè)試?(二)
在自動(dòng)駕駛中,如何進(jìn)行汽車毫米波雷達(dá)測(cè)試?(二)
毫米波雷達(dá),就是指利用波長(zhǎng)1-10mm、頻率30GHz-300GHz的毫米波,通過(guò)測(cè)量回波的時(shí)間差算出距離。毫米波雷達(dá)最開(kāi)始是用于軍事領(lǐng)域,而隨著技術(shù)的不斷提升,現(xiàn)在也開(kāi)始逐漸應(yīng)用于汽車領(lǐng)域。
工作原理
毫米波雷達(dá)(也就是ADAS智能系統(tǒng))主要分為三個(gè)模塊:環(huán)境感知,計(jì)算分析,控制執(zhí)行。首先由天線向外發(fā)射毫米波,發(fā)射出去的毫米波遇到障礙物時(shí)會(huì)被反射回來(lái),接收天線開(kāi)始接收目標(biāo)反射回來(lái)的信號(hào);經(jīng)后方處理后,將回波內(nèi)包含的速度、距離等信息轉(zhuǎn)換為可讀取信息,從而獲取汽車車身周圍的物理環(huán)境信息。
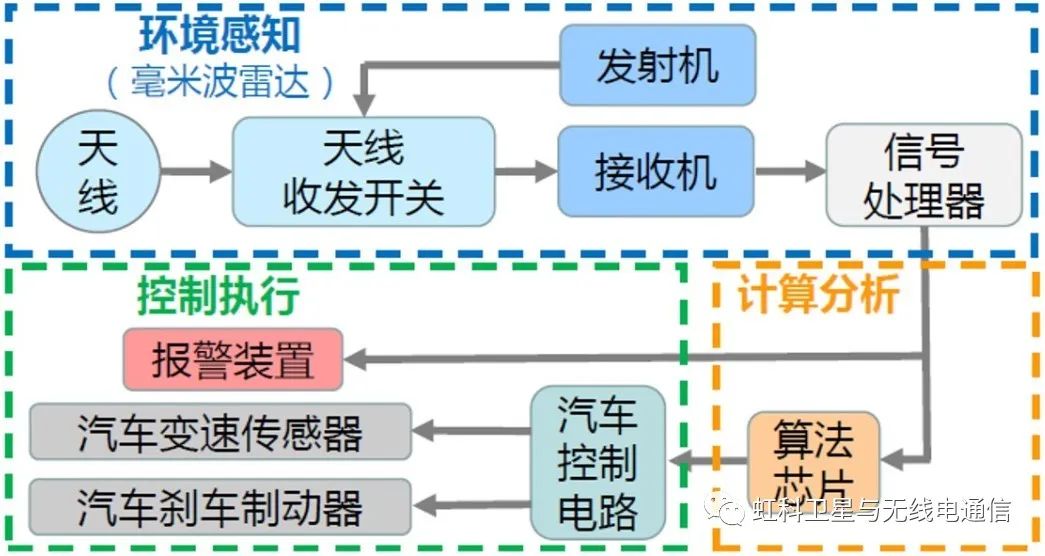
根據(jù)所探知的物體信息進(jìn)行目標(biāo)追蹤和識(shí)別分類,結(jié)合車身動(dòng)態(tài)信息進(jìn)行數(shù)據(jù)融合,經(jīng)由中央處理單元(ECU)進(jìn)行智能處理、合理決策后,告知駕駛員或及時(shí)對(duì)汽車做出主動(dòng)干預(yù)。
工作機(jī)制
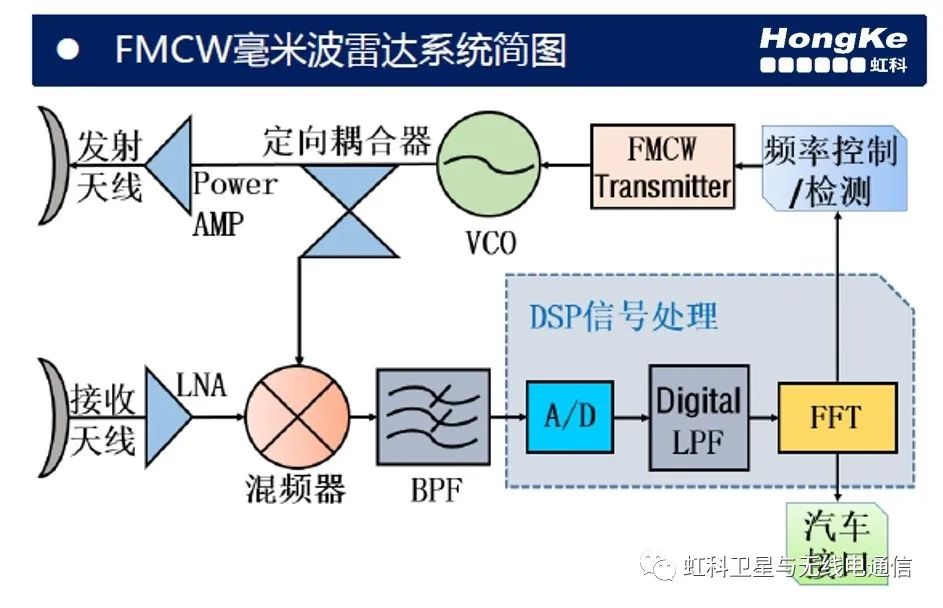
一般而言,發(fā)送的信號(hào)類型有兩種,一種是脈沖信號(hào)(即非連續(xù)信號(hào)),另外一種就是連續(xù)信號(hào)。而在車載毫米波雷達(dá)中,因?yàn)槠浼刃枰芴綔y(cè)多個(gè)目標(biāo),還要能夠從回波信號(hào)中讀取到速度與距離等信息,因此工作機(jī)制為線性調(diào)頻連續(xù)波機(jī)制(LFMCW mode)。除此之外,由于毫米波需要探測(cè)多個(gè)目標(biāo),因此其需要使用三角波,而不是鋸齒波,圖中是結(jié)合車載毫米波工作框圖給出FMCW波的整個(gè)系統(tǒng)簡(jiǎn)圖:
未來(lái)趨勢(shì)
目前來(lái)看,未來(lái)各探測(cè)傳感器融合是必然的趨勢(shì),這能夠取長(zhǎng)補(bǔ)短,并大大地節(jié)約成本,從芯片角度講,基于多芯片級(jí)聯(lián)的79GHz MiMo是產(chǎn)業(yè)發(fā)展方向。然而,毫米波雷達(dá)目前也是存在其自身缺陷的,相對(duì)于激光雷達(dá)而言,其成像的精細(xì)度上來(lái)看是不如激光雷達(dá)的,因此在小物體識(shí)別上是存在安全隱患的,而激光雷達(dá)目前依舊是ADAS系統(tǒng)中要用到的,從未來(lái)來(lái)看,視覺(jué)+相控陣(成像)毫米波雷達(dá)感知融合將成為一個(gè)重要的發(fā)展方向。
測(cè)試方案
虹科手持式頻譜分析儀Spectrum Compact能夠幫助進(jìn)行76GHz車輛無(wú)線電設(shè)備射頻測(cè)試,可以應(yīng)用于汽車毫米波雷達(dá)測(cè)試。在之前的文章中介紹了這款頻譜儀,今天我們重點(diǎn)介紹如何通過(guò)虹科手持式頻譜分析儀Spectrum Compact來(lái)進(jìn)行汽車毫米波雷達(dá)測(cè)試。
頻率范圍
- 發(fā)射機(jī)調(diào)整為最高的功率等級(jí)發(fā)射;
- 采用虹科手持式頻譜分析儀觀測(cè)信號(hào),記錄信號(hào)包絡(luò)的起始點(diǎn)與截止點(diǎn)。
占用帶寬
- 發(fā)射機(jī)調(diào)整為最高的功率等級(jí)發(fā)射;
- 設(shè)置頻譜分析儀中心頻率為被測(cè)信道的中心頻率,在車載毫米波雷達(dá)測(cè)試中選擇24GHz與77GHz。掃頻寬度為2倍標(biāo)稱信道帶寬,探測(cè)器選擇AVG模式(此時(shí)檢波器模式為RMS),追蹤方式最大值保持;
- 記錄頻譜儀上顯示的占信號(hào)99%功率的帶寬,或使用虹科手持式頻譜分析儀的POWER IN BAND功能,直接觀察99%功率所占帶寬。
帶外發(fā)射
- 發(fā)射機(jī)調(diào)整為最大發(fā)射模式;
- 設(shè)置頻譜儀起始頻率為73.5GHz, 截止頻率為76GHz,探測(cè)器選擇AVG模式(此時(shí)檢波器模式為RMS),追蹤方式最大值保持;
- 記錄帶外發(fā)射的最大值,其數(shù)值不得超過(guò)之前限值要求;
- 設(shè)置頻譜儀起始頻率為77GHz, 截止頻率為79.5GHz,追探測(cè)器選擇AVG模式(此時(shí)檢波器模式為RMS),追蹤方式最大值保持;
- 記錄帶外發(fā)射的最大值,其數(shù)值不得超過(guò)之前限值要求。
發(fā)射機(jī)雜散
- 對(duì)被測(cè)設(shè)備進(jìn)行配置,以便使其工作在最大的占空比和最大輸出功率等級(jí)的狀態(tài)下;
- 對(duì)于77GHz的雜散,設(shè)定在70-87GHz進(jìn)行FULL SPAN尋找,追蹤方式最大值保持;
- 記錄在掃描中發(fā)現(xiàn)的處于限值以下6dB范圍的任何發(fā)射。
接收機(jī)雜散
- 對(duì)被測(cè)設(shè)備進(jìn)行配置,以便使其工作在持續(xù)接收或沒(méi)有發(fā)射的狀態(tài)下;
- 對(duì)于77GHz的雜散,設(shè)定在70-87GHz進(jìn)行FULL SPAN尋找,追蹤方式最大值保持;
- 記錄在掃描中發(fā)現(xiàn)的處于限值以下6dB范圍的任何發(fā)射。
-
射頻
+關(guān)注
關(guān)注
104文章
5594瀏覽量
167925 -
通信
+關(guān)注
關(guān)注
18文章
6042瀏覽量
136146 -
無(wú)線通信
+關(guān)注
關(guān)注
58文章
4586瀏覽量
143637 -
無(wú)人駕駛
+關(guān)注
關(guān)注
98文章
4075瀏覽量
120628 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13867瀏覽量
166604
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
毫米波雷達(dá)的基頻和調(diào)制技術(shù) 毫米波雷達(dá)在機(jī)器人導(dǎo)航中的應(yīng)用
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)與激光雷達(dá)比較 毫米波雷達(dá)在自動(dòng)駕駛中的作用
康謀技術(shù) | 高效環(huán)境感知:毫米波雷達(dá)數(shù)據(jù)采集、可視化及存儲(chǔ)方案

康謀技術(shù) | 毫米波雷達(dá)技術(shù)解析

什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型

恩智浦展示汽車毫米波雷達(dá)最新解決方案
簡(jiǎn)述毫米波雷達(dá)的結(jié)構(gòu)、原理和特點(diǎn)
毫米波雷達(dá)具有哪些特點(diǎn)和優(yōu)勢(shì)
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
基于毫米波雷達(dá)的手勢(shì)識(shí)別算法
毫米波雷達(dá)在日常生活中的應(yīng)用
毫米波雷達(dá)在智能網(wǎng)聯(lián)汽車中的應(yīng)用
毫米波雷達(dá)的作用 毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
4D毫米波成像雷達(dá)的測(cè)試要求都有哪些嗯?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論