 帶您了解軍億無人機反制槍|無人機反制系統
帶您了解軍億無人機反制槍|無人機反制系統
隨著我們公司客戶的不斷積累,對無人機反制系統的需求越來越多,但是很多客戶都不太了解無人機反制系統的原理。今天深圳軍億電子就帶大家來了解一下。
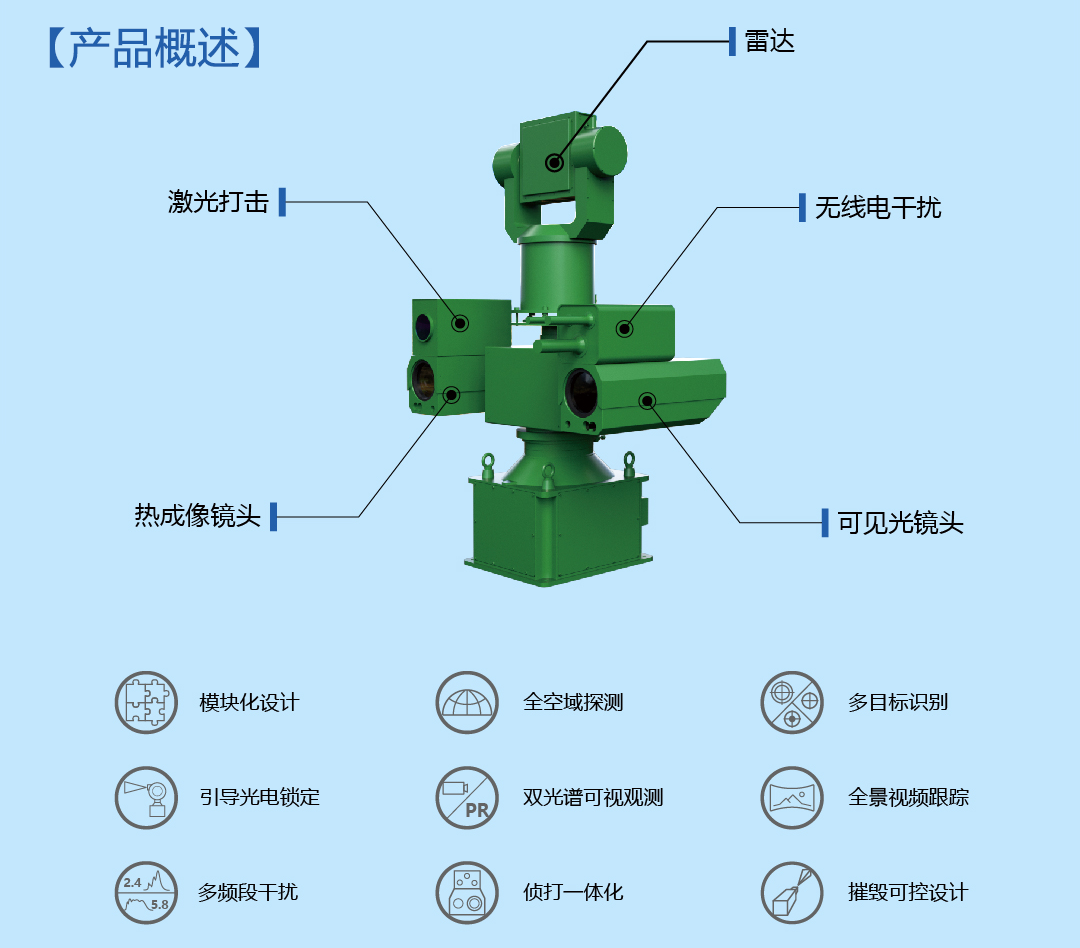
無人機反制系統大致分為:雷達探測,無線電偵測,光電跟蹤這三種方式。
雷達探測:無人制反制系統里用的最普遍的一種。按照掃描方式可以分為相掃、機掃等;按照不同的調制方式,把雷達劃分為脈沖編碼、線性調頻。
雷達技術在民航飛行上技術非常成熟,雷達探測過程中具有定位精準度高,遠距離可探測,反應速度快等優點。但是雷達探測在無人機低速飛行時或者處于懸浮狀態下,因為多普勒頻移較低,雷達就不能準確地探測到無人機。同時雷達探測時需要雷達天線,對架設天線的要求較高,建設成本較高。當雷達探測時遇到障礙物,比如大樹,高樓等就會出現無法探測到的情況。
無線電偵測:無人機的頻段包含1.5G、2.4G和5.8G頻段,通過無線電偵測對黑飛的無人機進行自動識別、分析、傳輸數據。通過頻段來探測無人機,即使有障礙物,只要無人機發出相應頻段,都可以探測到。無線電偵測也是無人機反制系統中用的最多的一項技術。但是無線電偵測也存在不足,當無人機進行靜默狀態時,依靠無線電偵測就無法實現。所謂的靜默狀態,即無人機按照原先設計好的線路飛行時,就屬于靜默飛行。這個時候就需要配合雷達探測,達到1+1>2的效果。
光電跟蹤:光電跟蹤系統包括陀螺穩定轉臺、光學跟蹤設備和紅外跟蹤設備。當出現不明無人機在區域內飛行時,光電跟蹤就能準確跟蹤到無人機的位置情況進行鎖定。
以上就是無人機反制系統的大致分類。當我們遇到不同客戶的不同需求時,公司會制定不同的反制系統方案。包括多個系統協同工作,多套系統的聯動,根據需要可以進行調整,靈活性高。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
無人機
+關注
關注
230文章
10437瀏覽量
180454
發布評論請先 登錄
相關推薦
無人機反制槍能控制多遠的無人機?
無人機反制槍是一種用于干擾和阻止無人機正常飛行的設備,通過發射特定頻率的干擾信號,使目標無人機失去控制或無法接收指令,從而達到阻止其飛行或迫
UAV反制槍如何應對國慶假期無人機亂飛?
UAV反制槍作為一種專門用于對抗和中和無人機的設備,在應對國慶假期無人機亂飛的問題上,可以發揮重要作用。以下是對UAV反制
特信無人機反制|無人機反制槍:現代空域安全的守護者
隨著無人機技術的飛速發展,其在民用、商業和軍事領域的應用日益廣泛。然而,無人機技術的普及也帶來了一系列安全隱患,如非法飛行、惡意偵查甚至恐怖襲擊等。為了有效應對這些挑戰,無人機反制
深圳特信無人機反制|什么是無人機反制系統?
特信無人機反制系統(AUDS)是一套專門設計來應對惡意使用無人機的設備,它結合了多種技術來有效防范無人機帶來的安全威脅。該
知語科技無人機反制系統的應用與挑戰
隨著無人機的普及,無人機違規飛行事件頻繁發生,給公共安全和隱私帶來了嚴重威脅。無人機反制系統作為應對這一問題的有效手段,得到了廣泛的應用。
演唱會無人機亂飛,無人機反制槍守護安全|特信無人機反制
隨著無人機技術的普及,越來越多的無人機出現在各類大型活動中,如演唱會。然而,無人機亂飛的現象也帶來了諸多安全隱患,如影響演出秩序、侵犯他人隱私等。為了應對這一挑戰,無人機
無人機反制領域的10個基礎問題,你都了解了嗎?|特信無人機反制
隨著無人機技術的快速發展和普及,其在各行各業中的應用愈發廣泛。然而,無人機的濫用和非法活動也日漸增多,給社會安全帶來了嚴峻挑戰。無人機反制技術應運而生,成為維護公共安全和秩序的重要手段

第四集 知語云智能科技無人機反制技術與應用--無人機的組成與工作原理
科技的視角,深入探討無人機的組成與工作原理,為您揭開無人機飛行的神秘面紗。
一、無人機的組成結構
無人機主要由機身、動力
發表于 03-12 11:28
第三集 知語云智能科技無人機反制技術與應用--無人機的應用領域
,一些不法分子也開始利用無人機進行非法活動,如偷拍隱私、干擾航空安全等。因此,無人機反制技術的研發和應用變得尤為重要。
知語云智能科技作為無人機反制
發表于 03-12 11:13
第二集 知語云智能科技無人機反制技術與應用--無人機的發展歷程
等問題層出不窮,給社會安全帶來了嚴重威脅。為了解決這些問題,知語云智能科技投入大量研發力量,推出了一系列無人機反制技術。
知語云智能科技的無人機反制
發表于 03-12 10:56
第一集 知語科技無人機反制技術與應用--無人機的定義與分類
隨著科技的飛速發展,無人機技術已成為當今社會的熱點話題。從航拍、農業噴灑到軍事偵察,無人機的應用領域日益廣泛。然而,無人機技術的普及也帶來了一系列安全隱患,無人機
發表于 03-12 10:42
知語云智能科技:反制無人機新篇章—全景監測與激光打擊的尖端技術
隨著無人機技術的飛速發展,其在民用、商用甚至軍事領域的應用日益廣泛。然而,無人機濫用和非法飛行也給社會安全帶來了新的挑戰。在這樣的背景下,知語云智能科技憑借其前沿的反制無人機設備及
發表于 02-23 11:37
震撼發布!知語云智能科技引領革新,全景反制無人機系統破繭而出!
隨著無人機技術的飛速發展,其在軍事、民用等領域的應用越來越廣泛,與此同時,無人機的安全問題也日益凸顯。為了應對這一挑戰,知語云智能科技憑借其卓越的技術實力,推出了一款全景反制無人機
發表于 01-30 16:07
\"【重磅推出】知語云智能科技:革新低空無人機反制系統,守護領空安全!
的低空無人機反制系統。
知語云智能科技的無人機反制系統,集成了先進的雷達探測、無線電干擾、導航誘
發表于 01-26 16:10





 工商網監
工商網監
評論