") Robot Framework簡(jiǎn)介及在汽車(chē)電子測(cè)試中的應(yīng)用
Robot Framework簡(jiǎn)介及在汽車(chē)電子測(cè)試中的應(yīng)用
前言
汽車(chē)電子軟件扮演著越來(lái)越重要的角色,為適應(yīng)市場(chǎng)變化,車(chē)載軟件和功能的開(kāi)發(fā)需要快速迭代。敏捷開(kāi)發(fā)、持續(xù)測(cè)試、CI/CT/CD實(shí)現(xiàn)和DevOps等成了汽車(chē)電子行業(yè)的高頻詞,也正在幫助OEM和零部件供應(yīng)商實(shí)現(xiàn)頻繁的代碼部署和實(shí)現(xiàn)可靠軟件交付的目標(biāo)。測(cè)試自動(dòng)化是這些過(guò)程中不可或缺的一部分,因?yàn)榭梢蕴嵘郎y(cè)試效率以加速開(kāi)發(fā)迭代,特別是對(duì)于重復(fù)性的任務(wù)或不需要任何人工干預(yù)的任務(wù)。
說(shuō)到自動(dòng)化測(cè)試,Robot Framework作為自動(dòng)化測(cè)試領(lǐng)域的明星框架,已經(jīng)開(kāi)始摩拳擦掌,躍躍欲試。今天我們一起來(lái)看下Robot Framework在汽車(chē)電子測(cè)試中,可以發(fā)揮出多大的作用。
1、Robot Framework簡(jiǎn)介
Robot Framework是一個(gè)廣受歡迎的自動(dòng)化測(cè)試框架。所謂框架,可以理解為一組準(zhǔn)則,遵循這些準(zhǔn)則可以獲取明顯的收益。自動(dòng)化測(cè)試框架就是由一個(gè)或多個(gè)自動(dòng)化測(cè)試基礎(chǔ)模塊、自動(dòng)化測(cè)試管理模塊、自動(dòng)化測(cè)試統(tǒng)計(jì)模塊等組成的工具集合。
Robot Framework是一個(gè)基于Python語(yǔ)言開(kāi)發(fā)的,可擴(kuò)展的,是以關(guān)鍵字驅(qū)動(dòng)模式的自動(dòng)化測(cè)試框架。它具有以下特點(diǎn):
(1)編輯用例簡(jiǎn)單,啟用易于使用的表格語(yǔ)法,以統(tǒng)一的方式創(chuàng)建測(cè)試用例;
(2)提供從現(xiàn)有關(guān)鍵字創(chuàng)建可重復(fù)使用的更高級(jí)別關(guān)鍵字的功能;
(3)提供易于閱讀的結(jié)果報(bào)告和HTML格式的日志;
(4)提供一個(gè)簡(jiǎn)單的庫(kù)API,用于創(chuàng)建自定義測(cè)試庫(kù),可以使用Python或Java本機(jī)實(shí)現(xiàn);
(5)支持創(chuàng)建數(shù)據(jù)驅(qū)動(dòng)的測(cè)試用例;
(6)提供標(biāo)記以分類(lèi)和選擇要執(zhí)行的測(cè)試用例;
(7)可以和SVN或者GIT及Jenkins持續(xù)集成。
上文我們提到Robot Framework是以關(guān)鍵字驅(qū)動(dòng)模式的自動(dòng)化測(cè)試框架,同時(shí)支持創(chuàng)建數(shù)據(jù)驅(qū)動(dòng)的測(cè)試用例。那么關(guān)鍵字驅(qū)動(dòng)和數(shù)據(jù)驅(qū)動(dòng)分別有什么特點(diǎn)呢?
關(guān)鍵字驅(qū)動(dòng)是由關(guān)鍵字和數(shù)據(jù)組成測(cè)試用例執(zhí)行測(cè)試,測(cè)試框架的底層負(fù)責(zé)解釋關(guān)鍵字,完成指令,測(cè)試用例的編輯者只需要使用關(guān)鍵字和數(shù)據(jù)組合,即可實(shí)現(xiàn)復(fù)雜的測(cè)試邏輯。測(cè)試執(zhí)行的代碼和測(cè)試用例代碼是分離的。這種方式學(xué)習(xí)成本比較高,開(kāi)發(fā)關(guān)鍵字及其相關(guān)功能的初始投資可能需要更長(zhǎng)的時(shí)間。
數(shù)據(jù)驅(qū)動(dòng)測(cè)試是從數(shù)據(jù)文件讀取輸入、輸出數(shù)據(jù),通過(guò)變量傳入測(cè)試腳本執(zhí)行測(cè)試,數(shù)據(jù)是可變的,測(cè)試設(shè)計(jì)是重復(fù)的、高度抽象的。使用這種測(cè)試方式可以減少重復(fù)勞動(dòng),測(cè)試用例易于修改和維護(hù)。但是這種方式不擅長(zhǎng)邏輯處理,一組腳本只能處理特定格式的數(shù)據(jù)。在一些特定的測(cè)試場(chǎng)景下,這種方式具有明顯優(yōu)勢(shì)。比如汽車(chē)ECU(如網(wǎng)關(guān))測(cè)試有數(shù)據(jù)轉(zhuǎn)發(fā)/路由的測(cè)試場(chǎng)景,需要測(cè)試的數(shù)據(jù)有時(shí)多達(dá)上千個(gè),我們只需創(chuàng)建一條數(shù)據(jù)轉(zhuǎn)發(fā)業(yè)務(wù)的測(cè)試用例,從數(shù)據(jù)文件中讀取輸入、輸出數(shù)據(jù)后,遍歷所有數(shù)據(jù)即可完成測(cè)試。
2、Robot Framework整體架構(gòu)
Robot Framework是一個(gè)通用的,和具體測(cè)試工具松耦合的框架,其高度模塊化的架構(gòu)如下圖所示:
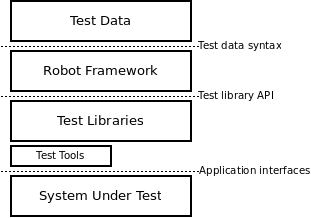
測(cè)試數(shù)據(jù)(Test Data)使用非常簡(jiǎn)單、易于編輯的表格格式。Robot Framework會(huì)解析測(cè)試數(shù)據(jù),執(zhí)行測(cè)試用例,并生成日志和報(bào)告。框架本身對(duì)測(cè)試對(duì)象可以完全“一無(wú)所知”,而是通過(guò)測(cè)試庫(kù)與其交互。測(cè)試庫(kù)可能是直接使用被測(cè)應(yīng)用程序的接口,也可以使用其它底層的測(cè)試工具作為驅(qū)動(dòng)。
3、Robot Framework環(huán)境安裝
Robot Framework環(huán)境的安裝比較簡(jiǎn)單,只需兩步即可完成:
(1)安裝Python配置環(huán)境變量;
(2)打開(kāi)dos窗口,輸入指令 pip install robotframework,點(diǎn)擊回車(chē),安裝Robot Framework。
4、Robot Framework常用關(guān)鍵字
上文我們提到Robot Framework是一個(gè)關(guān)鍵字模式驅(qū)動(dòng)的自動(dòng)化測(cè)試框架,Robot Framework的測(cè)試用例由關(guān)鍵字和測(cè)試數(shù)據(jù)組成。關(guān)鍵字是用Python語(yǔ)言編寫(xiě)的函數(shù),也即是一個(gè)個(gè)方法。它是為了完成一個(gè)功能來(lái)設(shè)計(jì)的,分為系統(tǒng)關(guān)鍵字和用戶關(guān)鍵字。
系統(tǒng)關(guān)鍵字包含標(biāo)準(zhǔn)庫(kù)里面的關(guān)鍵字和第三方庫(kù)里面的關(guān)鍵字,就像C/C++的庫(kù)函數(shù)或者Python的內(nèi)置函數(shù)一樣。
用戶關(guān)鍵字是根據(jù)業(yè)務(wù)需求將不同的業(yè)務(wù)封裝成一個(gè)關(guān)鍵字或者將用例執(zhí)行的步驟封裝成一個(gè)關(guān)鍵字,就像C/C++或者Python中的用戶自定義函數(shù)。
下面我們介紹幾個(gè)常見(jiàn)關(guān)鍵字的用途。
Convert To Integer:將給定的變量轉(zhuǎn)換成一個(gè)整數(shù)。示例:

Import Library:導(dǎo)入擴(kuò)展庫(kù)或者自定義庫(kù)。示例:

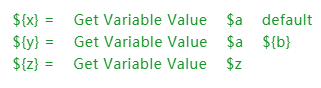
Get Variable Value:獲取變量的值,賦給一個(gè)新的變量,如果變量不存在可以設(shè)置一個(gè)默認(rèn)值。示例:
Log:使用給定的級(jí)別記錄給定的信息。示例:

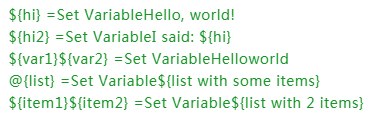
Set Variable:給變量設(shè)置值。示例:
Should Be Equal:Robot Framework中的斷言關(guān)鍵字,如果給定的對(duì)象不相等,就會(huì)判定失敗。示例:

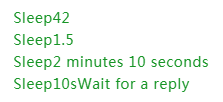
Sleep:測(cè)試執(zhí)行等待一定時(shí)間。示例:
5、Robot Framework測(cè)試用例示例
說(shuō)了這么多,大家肯定想趕緊看看Robot Framework是怎么使用的,現(xiàn)在我們通過(guò)一個(gè)簡(jiǎn)單的例子來(lái)說(shuō)明Robot Framework是怎么執(zhí)行測(cè)試的。
這條測(cè)試用例的操作步驟如下:
(1)加載CANoe測(cè)試工程;
(2)啟動(dòng)測(cè)試;
(3)等待一定時(shí)間,確保CANoe啟動(dòng)完成;
(4)設(shè)置系統(tǒng)變量的值;
(5)等待一定時(shí)間,確保系統(tǒng)變量設(shè)置完成;
(6)獲取關(guān)聯(lián)系統(tǒng)變量的信號(hào)值;
(7)比較設(shè)置的值和讀取的值是否相同;
(8)終端輸出提示“測(cè)試用例執(zhí)行結(jié)束”。
Robot Framework編寫(xiě)的測(cè)試用例如下圖一所示:
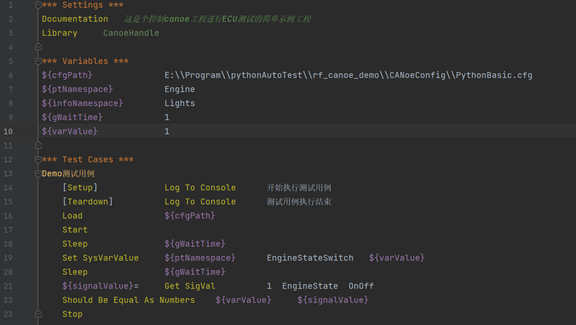
圖一 Robot Framework測(cè)試用例示例
執(zhí)行測(cè)試用例:dos窗口中輸入robot測(cè)試用例路徑,點(diǎn)擊回車(chē)即可,這里執(zhí)行用例的邏輯是使用pip安裝Robot Framework時(shí),會(huì)在Python安裝路徑下面的Scripts文件夾生成robot.exe文件,Scripts文件夾已經(jīng)添加到系統(tǒng)路徑,因此不需要再配置robot.exe的系統(tǒng)路徑就可以直接調(diào)用。
執(zhí)行后用例后,CANoe中關(guān)聯(lián)系統(tǒng)變量的信號(hào)值設(shè)置成功,如圖二所示。
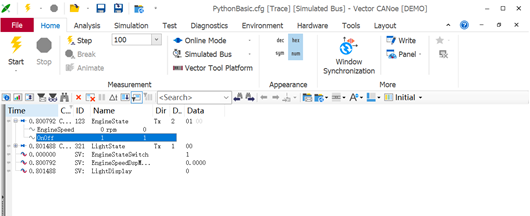
圖二 CANoe信號(hào)EngineState::OnOff值設(shè)置為1
用例執(zhí)行完成后,生成的測(cè)試報(bào)告如圖三所示。

圖三 測(cè)試用例執(zhí)行后生成的測(cè)試報(bào)告
6、Robot Framework與CANoe結(jié)合使用
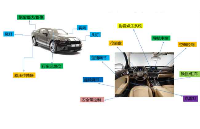
相比于IT行業(yè)的軟件測(cè)試,汽車(chē)電子需要搭建硬件測(cè)試環(huán)境,測(cè)試時(shí)需要監(jiān)控和仿真很多總線信號(hào)和硬線信號(hào),CANoe作為專業(yè)的總線網(wǎng)絡(luò)開(kāi)發(fā)和測(cè)試工具被眾多整車(chē)廠和供應(yīng)商的系統(tǒng)設(shè)計(jì)師、開(kāi)發(fā)工程師和測(cè)試工程師所廣泛使用。配合Vector的硬件設(shè)備,如VN通信硬件接口卡及VT IO板卡,以及圖形化自動(dòng)化測(cè)試工程開(kāi)發(fā)軟件vTESTstudio,可以勝任汽車(chē)電子研發(fā)測(cè)試的各項(xiàng)任務(wù)。Robot Framework和CANoe結(jié)合使用,既帶來(lái)了Robot Framework可以自動(dòng)部署測(cè)試軟件、自動(dòng)截取日志、可以生成易于閱讀的測(cè)試報(bào)告和可以靈活的選取測(cè)試用例的優(yōu)點(diǎn),也保留了Vector工具在多總線支持、網(wǎng)絡(luò)監(jiān)測(cè)和分析、系統(tǒng)仿真等方面的優(yōu)勢(shì),各取所長(zhǎng)。
CANoe是留有COM Interface的,這樣我們可以通過(guò)第三方的程序調(diào)用CANoe開(kāi)放的API。調(diào)用交互的部分DEMO代碼如下圖四所示:
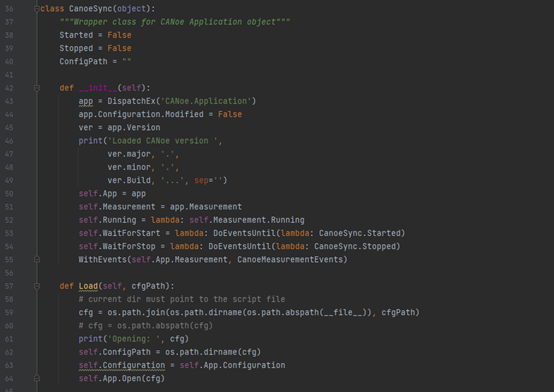
圖四 Python編程調(diào)用CANoe代碼
Robot Framework和CANoe結(jié)合使用一般有兩個(gè)思路:
第一種情況是把測(cè)試用例的過(guò)程主體在Robot Framework環(huán)境中編寫(xiě)腳本實(shí)現(xiàn)并執(zhí)行,在執(zhí)行過(guò)程中調(diào)用CANoe提供測(cè)試數(shù)據(jù)、參數(shù)、變量的讀取和設(shè)定,這個(gè)思路適合對(duì)時(shí)間要求不敏感的測(cè)試用例。如下圖五所示用例,CanoeHandle為自定義的關(guān)鍵字庫(kù),創(chuàng)建了加載CANoe工程、啟動(dòng)測(cè)試、停止測(cè)試、獲取信號(hào)值、設(shè)置系統(tǒng)變量值、獲取系統(tǒng)變量值等關(guān)鍵字,可以使用這些關(guān)鍵字組合創(chuàng)建Robot Framework測(cè)試用例,執(zhí)行測(cè)試。
圖五 基于Robot Framework編寫(xiě)CANoe測(cè)試用例
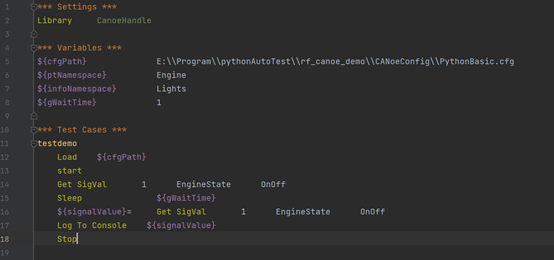
第二種情況是測(cè)試用例整體在Vector工具鏈中開(kāi)發(fā)測(cè)試工程和腳本(比如基于vTESTstudio開(kāi)發(fā)圖形化測(cè)試工程或是CANoe-CAPL編寫(xiě)測(cè)試腳本),并在CANoe中執(zhí)行工程和腳本。此時(shí),如圖六所示,Robot Framework作為一個(gè)測(cè)試用例管理框架來(lái)使用,CanoeHandle為自定義的關(guān)鍵字庫(kù),創(chuàng)建了加載CANoe工程、加載測(cè)試腳本、執(zhí)行測(cè)試腳本等關(guān)鍵字,可以使用Robot Framework進(jìn)行測(cè)試管理,根據(jù)實(shí)際需求刪選測(cè)試用例、自動(dòng)控制測(cè)試開(kāi)始、停止等。結(jié)合Jenkins打造通用的自動(dòng)化持續(xù)集成測(cè)試平臺(tái),可以顯著提升測(cè)試效率。
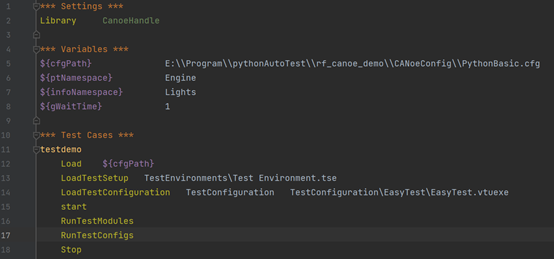
圖六 基于Robot Framework管理CANoe測(cè)試工程
結(jié)束語(yǔ)
IT領(lǐng)域的開(kāi)發(fā)理念和以太網(wǎng)等具體通信技術(shù)經(jīng)過(guò)優(yōu)化改造后在汽車(chē)上的應(yīng)用,為軟件定義汽車(chē)的實(shí)現(xiàn)提供了諸多方法論和技術(shù)手段上的支撐和支持。同樣,發(fā)源于IT行業(yè)的測(cè)試技術(shù)也越來(lái)越多地被應(yīng)用到汽車(chē)電子的測(cè)試中,在過(guò)去一年的項(xiàng)目中,北匯已經(jīng)將Robot Framework與CANoe等汽車(chē)行業(yè)的主流工具進(jìn)行了結(jié)合應(yīng)用,積累了一些實(shí)踐經(jīng)驗(yàn),期待與大家深入交流和探討。下期我們將帶來(lái)Robot Framework結(jié)合Jenkins的測(cè)試實(shí)踐應(yīng)用的主題,敬請(qǐng)關(guān)注。
-
CANoe
+關(guān)注
關(guān)注
4文章
66瀏覽量
8665
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
總線在汽車(chē)電子中的應(yīng)用
電阻器在汽車(chē)電子中的重要性
NTC熱敏電阻在汽車(chē)電子中的應(yīng)用
技術(shù)能力 | 汽車(chē)電子電性能測(cè)試
soc在汽車(chē)電子中的應(yīng)用前景
汽車(chē)電子測(cè)試必讀:高效高性價(jià)比互連方案

汽車(chē)電子芯片推拉力測(cè)試機(jī)測(cè)試流程的幾個(gè)關(guān)鍵步驟

功率分析儀在新能源汽車(chē)電性能測(cè)試中的應(yīng)用
示波器探頭在電動(dòng)汽車(chē)EV的逆變器測(cè)試中的應(yīng)用
示波器在射頻信號(hào)測(cè)試中的應(yīng)用
任意波形發(fā)生器在汽車(chē)電子測(cè)試中的應(yīng)用
Framework獲1800萬(wàn)美元融資,將拓展電子產(chǎn)品領(lǐng)域
示波器高壓探頭在汽車(chē)電子的應(yīng)用方案
應(yīng)用分享 | 高性能電源在汽車(chē)ECU地漂測(cè)試中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論