") 科瑞特(CRT)3~6軸拋光運動控制示教系統(tǒng)
科瑞特(CRT)3~6軸拋光運動控制示教系統(tǒng)
一、CRT3-6軸控制系統(tǒng)功能及應用簡介
系統(tǒng)采用全示教操作方式,降低用工門檻,大屏觸摸操作,傻瓜化、上手快;
硬件可選3~6軸。多軸聯(lián)動,輕松實現(xiàn)3軸螺旋插補,3~6軸直線插補;
大存儲空間,內(nèi)置512個程序自由切換,每個程序默認200個動作步序;
可針對客戶做定制開發(fā)以滿足特殊需求;
適用于拉絲、打磨、拋光等工藝,可用于手機殼毛邊打磨、不銹鋼餐具拋光、表殼拋光等。
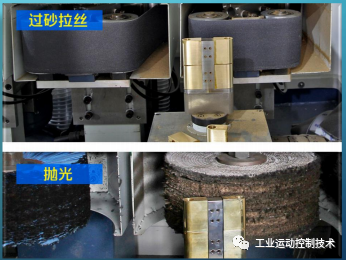
過砂拉絲拋光
二、系統(tǒng)操作界面功能介紹
1、主界面
手動操作、參數(shù)設置、程序瀏覽、運行畫面,四個模塊組成。
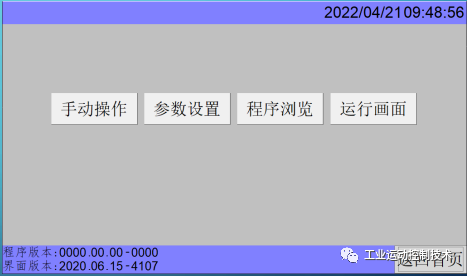
主界面
2、手動界面
實現(xiàn)各軸手動操作和IO點的狀態(tài)顯示。
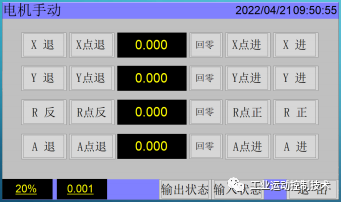
電機手動
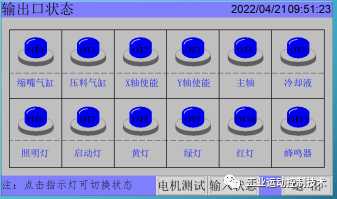
輸出狀態(tài)

輸入狀態(tài)
3、運行狀態(tài)界面
運行狀態(tài)監(jiān)控,整機啟停操作。

運行狀態(tài)
4、參數(shù)設置界面
基本運動參數(shù)、各軸硬件參數(shù)、系統(tǒng)功能配置參數(shù)、用戶權(quán)限參數(shù)。
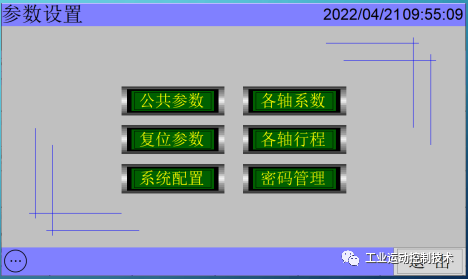
參數(shù)設置
5、程序編輯界面
程序選擇與切換,動作步序的編輯;
基本動作:軸單動、直線聯(lián)動、圓弧聯(lián)動、IO動作、延時、循環(huán),支持自由定制。

程序示教編輯
基本動作選項:軸單動、直線聯(lián)動、圓弧聯(lián)動、IO動作、延時、循環(huán),支持自由定制。

基本動作選項
6、絕對坐標定位
3軸絕對坐標螺旋插補示教。
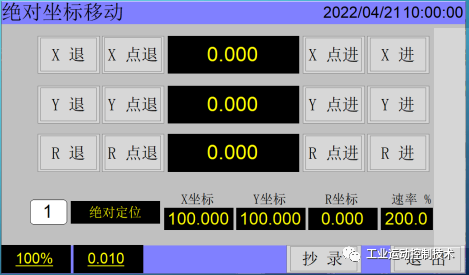
絕對坐標移動
7、自定義循環(huán)示例
20個計數(shù)器自定義循環(huán),支持嵌套。

自定義循環(huán)
CRT示教控制系統(tǒng)具備強大的運算能力、極高的輸出頻率、大容量可擴展的數(shù)據(jù)儲存空間,完全符合各種專用機及標準機發(fā)揮更高性能、更高效率的應用需求。
-
控制
+關(guān)注
關(guān)注
4文章
1013瀏覽量
122708
發(fā)布評論請先 登錄
相關(guān)推薦
智能拖動示教噴涂機器人:技術(shù)革新與未來展望

CRT激光焊接示教系統(tǒng)功能詳解及應用場景與效益分析



EtherCAT運動控制器配套用手持示教盒快速入門 #正運動技術(shù) #運動控制器 #示教盒 #正運動
什么是拖動示教?機器人拖動示教方式分析

基于導納控制的機器人拖動示教原理和實現(xiàn)步驟
焊接機器人示教模式怎么設置

工業(yè)機器人示教器按鈕功能介紹
VPLC系列機器視覺運動控制一體機在五軸聯(lián)動點膠上的應用
機器視覺控制軸運動原理是什么?
機器視覺控制軸運動原理是什么
基于S3C2440和專用DSP的嵌入式四軸運動控制器
工業(yè)機器人示教器可以通用嗎?給你5點建議
基于RK3568核心板的工業(yè)示教器解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論