 科聰移動機器人控制系統構建潛入頂升式AMR,助力軌道交通裝備產業高速發展
科聰移動機器人控制系統構建潛入頂升式AMR,助力軌道交通裝備產業高速發展
行業背景
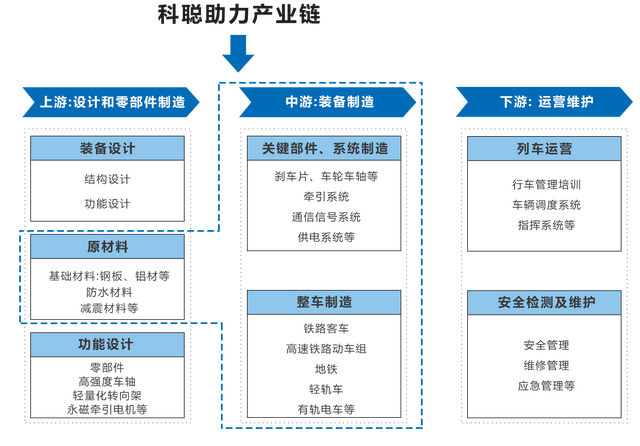
隨著中國軌道交通裝備產業規模的不斷擴大,發展模式正逐步向產業鏈協同發展轉變,產業鏈的智能化能力將會成為阻礙其優化升級的關鍵因素。上游的原材料生產企業和中游的裝備制造企業,面對生產效率提升的問題,越來越多的企業通過在生產中投入移動機器人來解決這一問題,實現貨物分揀對接和自動無人化轉運,實現入庫庫貨車貨物無人化搬運,實現智能物流的改造和升級。
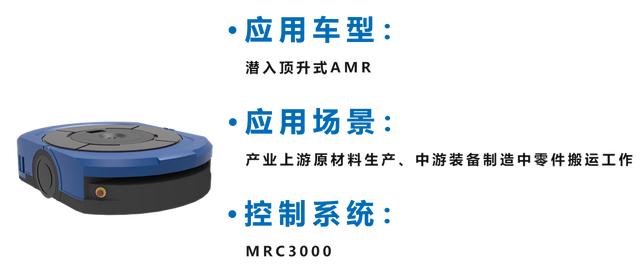
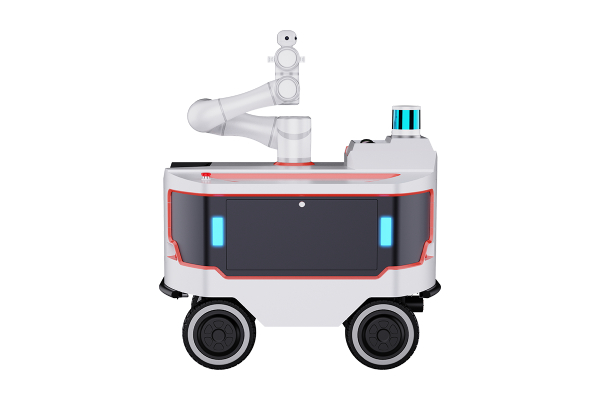
應用車型
車型解決方案→
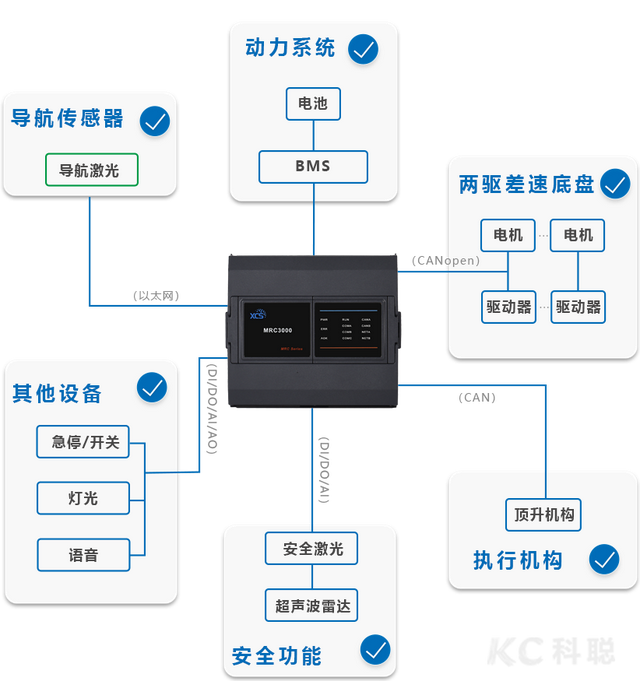
本車型控制核心→
此次應用為潛入頂升式AMR,結合投運現場,搭載科聰MRC3000導航控制器。

應用難點對策
當項目中AMR采用混合導航(激光自然導航+二維碼導航)時:
難點①現場需要鋪設大量二維碼,人工鋪設二維碼存在誤差,人工標定修正工作量大,內容枯燥
對策:科聰移動機器人控制系統具備導航自學習功能,根據多趟任務的執行情況,不斷檢測誤差并自動進行補償修正,省去了工程師繁復的調試和標定工作,同時保證了導航的靈活、穩定和準確。
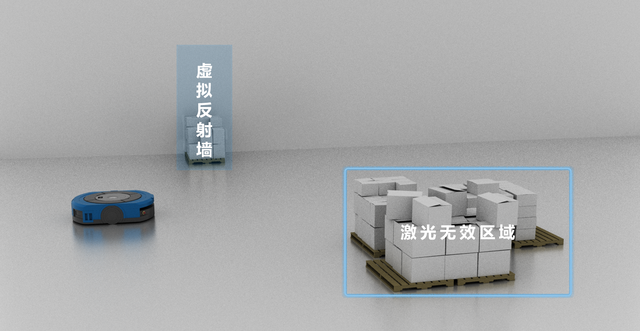
難點②激光自然導航對環境變化的耐受性較差,容易產生定位的偏差。
對策:科聰移動機器人控制系統擁有豐富的項目經歷和應用經驗,算法對無效定位環境進行過濾,保證移動機器人在激光自然導航時的準確定位和穩定導航。
科聰完善的整體解決方案可使項目在現場投用時,減少工程師實施工作量,保證導航的靈活、穩定和準確,實現物料的自動化轉運和上下料。同時可提高軌道交通裝備產業鏈上游和中游的生產效率,降低成本,助力數字化、智能化管理提升。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
AMR
+關注
關注
3文章
431瀏覽量
30260 -
移動機器人
+關注
關注
2文章
764瀏覽量
33585 -
AGV
+關注
關注
27文章
1318瀏覽量
41148 -
導航控制
+關注
關注
0文章
3瀏覽量
1095
發布評論請先 登錄
相關推薦
科沃斯商用清潔機器人正式交付于蘇州軌道交通
12月19日,由蘇州軌道交通運營一分公司開展的“2024年服務綜合技術比武暨精致服務明星評比”活動火熱召開。該活動旨在打造“江南雅韻、精致服務”品牌體系,促進服務質量全面提升。科沃斯商用清潔機器人
移動機器人的技術突破和未來展望
移動機器人已經成為現代社會不可或缺的一部分,在各個領域發揮著越來越重要的作用。在這個過程中,富唯智能機器人以其卓越的技術突破,引領著移動機器人領域的發展潮流。

尋跡智行AMR展品亮相2024第六屆浙江國際智慧交通產業博覽會
2024第六屆浙江國際智慧交通產業博覽會在杭舉行,尋跡智行攜協作式機械手臂AMR亮相,結合AI、機器視覺等技術,實現復雜搬運任務。博覽會促進智慧交通
智能移動機器人系統方案指南
自主移動機器人 (AMR) 和自動導引車 (AGV) 是具有移動、感知和連接能力的無人機器人,用于運輸和移動各種重量和尺寸的負載,以及執行其



海康機器人第100000臺移動機器人下線
海康機器人第100000臺移動機器人已經成功下線 。這是一個重要的里程碑,標志著海康機器人在全品類移動機器人(AMR)領域取得了顯著的進展。
軌道交通巡檢機器人的應用范圍
在現代軌道交通系統的龐大網絡中,無數的軌道、設備和設施交織在一起,如同一個精密的機器在高效運轉。而在這背后,軌道交通巡檢機器人正悄然登場,它
引領企業物流革新,穩石AMR機器人助力智能制造再升級
隨著科技的不斷發展和智能制造的興起,企業對于物流效率和生產效率的要求越來越高。在這樣的背景下,穩石AMR(自主移動機器人)機器人成為了企業物流革新和智能制造的重要

機械臂和移動機器人兩種控制系統方案對比
機械臂對精度和運動穩定性的要求較高,因此計算量大、周期短,比移動機器人一般要高1到2個量級。移動機器人一般對同步精度要求不高,其配置相對較低。
發表于 03-11 09:53
?1107次閱讀

自主移動機器人(AMR)功能和特點
復合機器人是一種集成了移動機器人、協作機器人和機器視覺等多項功能的新型機器人。它的開發目的是為了解決工廠物流中最后一米的問題,提供智能搬運解

移動機器人幕后的全能冠軍——MRC5000
款經得起時間檢驗的控制器,移動機器人幕后的全能冠軍——MRC5000,道一道它的“五千”故事。跨越千山萬水MRC5000是科聰于2017年在德國漢諾威發布第一款純

2023年國外移動機器人行業融資收購情況
根據新戰略移動機器人產業研究所統計,2023年,國外移動機器人(AGV/AMR)領域融資事件共計31起,累計金額超7億美元,折合人民幣達50億元,最高單筆融資金額為1.35億美元。
發表于 01-31 14:56
?300次閱讀

浙江科聰完成A輪近億元融資:持續領跑移動機器人控制系統市場
絡的建設。移動機器人巨大賽道,定位專注專業的控制系統公司受產業升級、技術迭代與創新、人口結構變化和政策支持等因素影響,移動機器人成為一個高速






 工商網監
工商網監
評論