 XKCON祥控港口碼頭斗輪機無人值守智能控制系統
XKCON祥控港口碼頭斗輪機無人值守智能控制系統
濟南祥控自動化搭建的斗輪堆取料機無人值守智能控制系統采用精確定位、流量檢測、三維圖形展示、智能控制等多項先進技術,使港口碼頭實現了遠程控制斗輪機就地自動化堆取物料的功能,減輕了司機的工作強度,提高了港口碼頭物料堆取的作業效率和自動化水平。
XKCON祥控港口碼頭斗輪堆取料機無人值守智能控制系統具備的主要功能:
精準定位:在港口碼頭的斗輪堆取料機上安裝行程傳感器和回程傳感器等高精度定位裝置,實現斗輪機大車行走,懸臂俯仰、回轉角度實時監測,精度達到厘米級。
流量檢測:在斗輪機懸臂皮帶安裝激光雷達掃描儀,在堆取料工作時對料垛作業面進行實時掃描和料物實時流量檢測。
智能控制:系統對料垛位置、瞬時流量、斗輪機位置及狀態等信息進行智能分析和計算,實現斗輪機遠程一鍵式定位及作業啟停控制,全過程無人工干預。
安全防護:通過大車和懸臂防撞檢測、空間相對位置計算、激光測距、防過載保護、智能圖像識別,高清視頻監控等技術,實現極限、防撞、跨場等斗輪機運行安全的軟、硬件雙重保護。
多臺監管:實現精準的恒流量精確控制,支持多臺斗輪機按照設定比例混配作業。
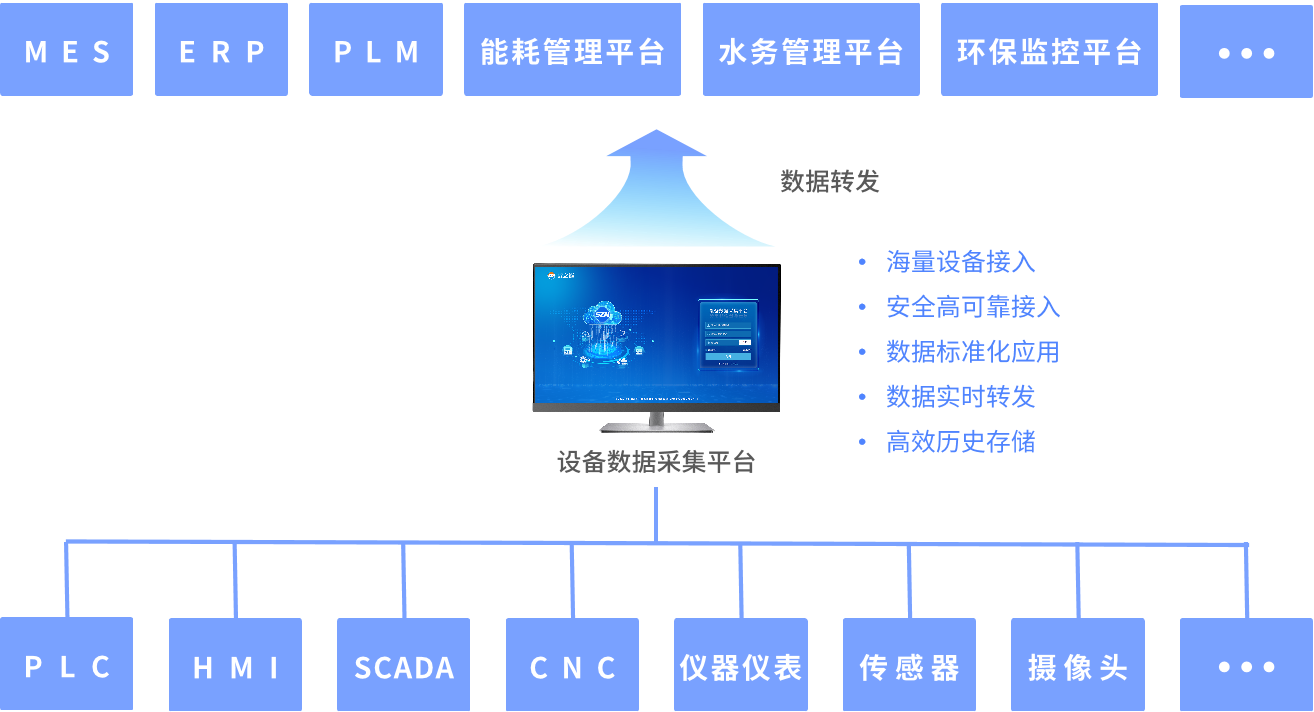
XKCON祥控港口碼頭斗輪堆取料機無人值守智能控制系統主要是使用三維激光掃描儀掃描目標料堆的料堆三維形狀,并根據堆取料機臂長、臂高等機械參數,計算出堆取料機的取料切入點的姿態,然后剩下回轉取料根據斗輪電流和實時取料流量來確定取料起止回轉角度;同時。斗輪堆取料機根據控制指令實現自動化堆料或取料作業,并將實時設備參數數據反饋給中控主機,實現港口碼頭物料的的全自動堆取作業。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制系統
+關注
關注
41文章
6622瀏覽量
110623 -
監測
+關注
關注
2文章
3611瀏覽量
44532
發布評論請先 登錄
相關推薦
XKCON祥控變電站智能綜合監控系統
濟南祥控自動化設備有限公司設計的XKCON祥控變電站智能綜合監控系統融合了視頻和環境監控兩大主要功能,將視頻與環境數據(溫濕度、六氟化硫、氧
斗輪機5G遠程監控物聯網系統解決方案
斗輪機,又稱斗輪堆取料機,是港口及大型散貨堆場用于煤炭、礦石、糧食等散裝物料堆存與取料的專用機械設備。在智慧港口的建設中,
火電廠斗輪機PLC數據采集如何實現
,實現煤炭的堆存或取用,顯著提高了火電廠的輸煤效率。 隨著自動化技術逐漸應用于斗輪機中,相應的物聯網平臺也得到廣泛應用,帶來遠程監控、管理、控制等智能應用。對此,數之能提供接入PLC、
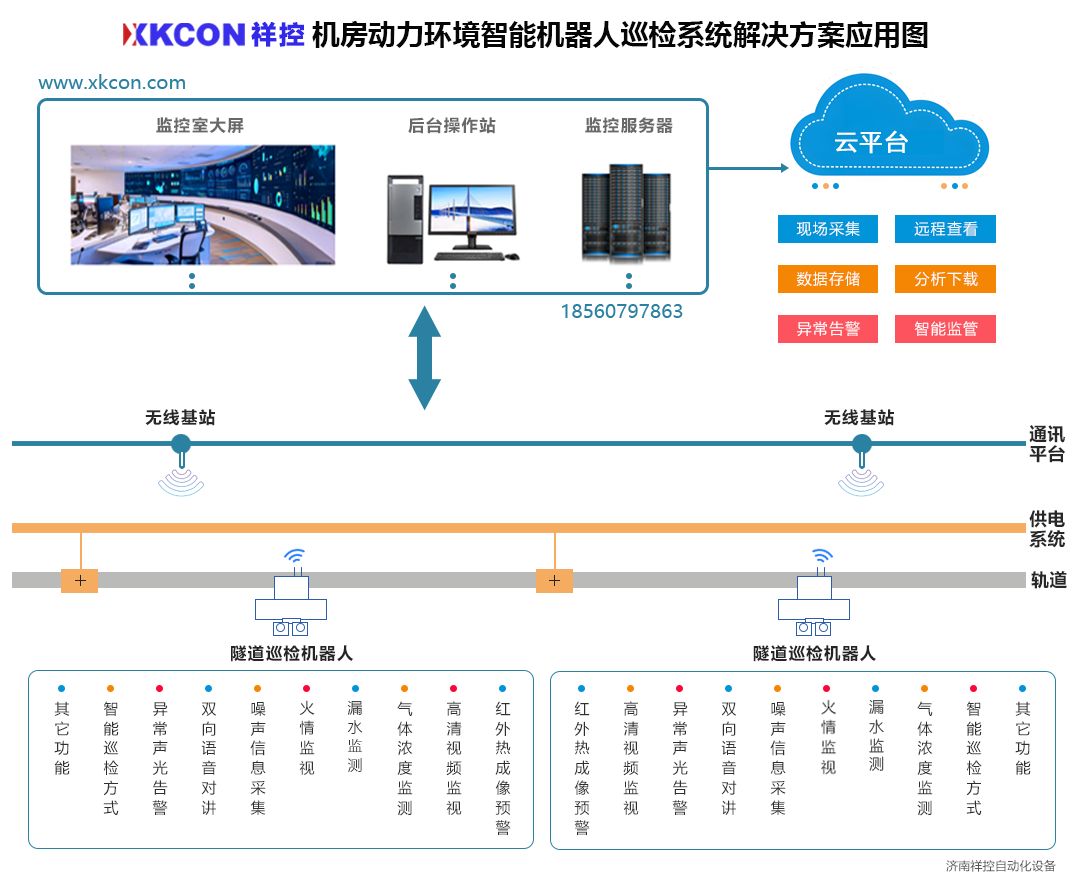
XKCON祥控機房動力環境智能機器人巡檢系統解決方案
了24小時專人值班,定時巡查機房環境設備,這樣不僅加重了管理人員的負擔,而且還具有信息滯后性,不能及時排除故障。 濟南祥控自動化設備有限公司設計開發的XKCON祥控機房動力環境智能機器
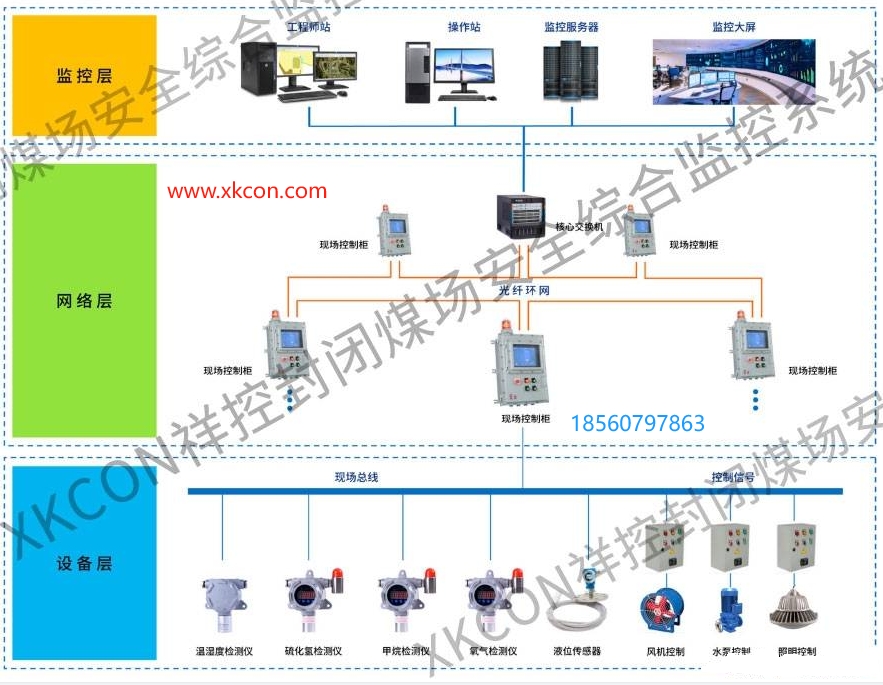
具備數據采集、儲存和傳輸,數據處理、分析及報警,應急智能處置等功能的XKCON祥控封閉儲煤場安全監測系
XKCON祥控封閉儲煤場安全監測系統在無人值守的情況下,實現全天候自動監測,具備數據采集、儲存和傳輸,數據處理、分析及報警,應急

XKCON祥控原煤筒倉安全監測系統能夠對煤溫、甲烷、氧氣、煙氣、和料高進行檢測和安全預警
XKCON祥控原煤筒倉安全監測系統由各種類型傳感器、測量控制單元和數據處理中央控制室三部分構成,該系統
XKCON祥控變電站智能輔控系統包括環境監測、設備狀態監測、電氣設備控制、安防消防等子系統
隨著社會經濟的發展,工業、商業以及家庭的用電逐漸增加,為有效保障電力可靠供應,變電站的數量也就越來越多。 濟南祥控自動化設備有限公司開發的XKCON祥控變電站智能輔控

XKCON祥控防爆型筒倉安全監測系統能夠對筒倉進行7x24h長期在線監測
是關鍵。 為了保障儲煤簡倉的安全運行,必須加強對簡倉中的儲煤溫度、可燃氣體濃度、CO濃度、粉塵濃度、煙霧等參數進行監測和管理。 濟南祥控自動化設備有限公司開發的XKCON祥控防爆型筒倉安全監測

碼頭高桿燈遠程監控智能控制系統解決方案
結合到一起,就要求港口碼頭建立一套遠程、智能的管理機制,來縮減成本支出并保證高桿燈的良好運營。 對此,物通博聯提供碼頭高桿燈遠程監控智能

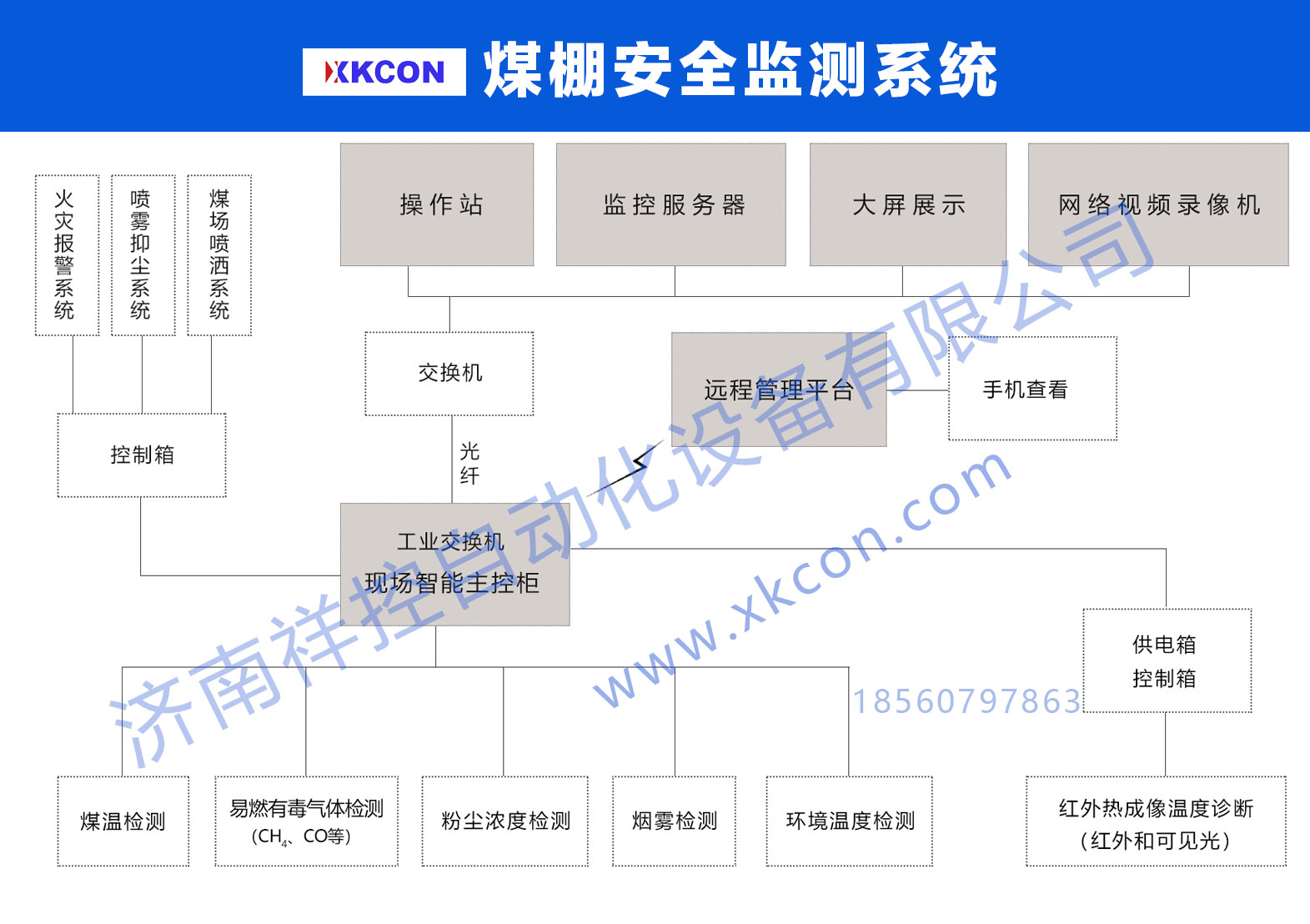
XKCON祥控煤棚安全監測系統能夠對煤棚環境產生的安全隱患進行監測、預警和控制
XKCON祥控煤棚安全監測系統由粉塵、煙霧、甲烷、一氧化碳、氧氣等環境檢測設備,煤堆溫度檢測設備,現場智能監控主機和遠程管理軟件組成,能夠對煤棚環境可能產生的安全隱患進行監測、預警和
XKCON祥控粉塵濃度在線監測系統通過實時檢測、智能控制等技術手段,可及時/處置/避免高粉塵隱患
控粉塵濃度在線監測系統主要由采集端激光粉塵檢測儀、通訊端智能監控主機、以及管理終端監控軟件三部分組成;它通過實時檢測、智能控制等技術手段,可避免或消除出現高濃度粉塵的危險情況。 激光粉

XKCON智能變電站輔助監控系統采用模塊化結構設計
XKCON祥控智能變電站輔助監控系統將輔助設備信息數字化,通過監測、預警和控制三種技術手段,通過軟件即可準確判斷和查找故障,提升了變電站的電

XKCON祥控斗輪堆取料機自動化控制系統
XKCON祥控斗輪堆取料機自動化控制系統采用先進的超聲波傳感技術,杜絕設備運行中出現碰撞的情況;采用高精度編碼器實現堆取料機實時精準定位并將其轉算為堆取料準確位置;應用編碼器及RFID

XKCON祥控煤場安全監控系統介紹
XKCON祥控煤場安全監控系統采用高可靠性的傳感器和通信設備,確保數據的準確性和穩定性;通過實時監測、預警功能、自動化控制等手段,可以有效提高煤場的安全性和生產效率。





 工商網監
工商網監
評論