 【虹科案例】虹科高速數字化儀在光探測和測距 (LIDAR) 系統中的應用
【虹科案例】虹科高速數字化儀在光探測和測距 (LIDAR) 系統中的應用
01
引言
50 多年前激光技術的發展催生了光探測和測距 (LIDAR) 系統,該系統在距離計算方式上取得了突破。LIDAR 的原理與雷達使用的原理非常相似。主要區別在于雷達系統檢測物體反射的無線電波,而激光雷達使用激光信號。這兩種技術通常采用相同類型的飛行時間方法來確定物體的距離。然而,由于激光的波長比無線電波的波長短得多,因此激光雷達系統可提供卓越的測量精度。激光雷達系統還可以檢查反射光的其他屬性,例如頻率內容或偏振,以揭示有關物體的其他信息。
激光雷達系統現在被用于越來越多的應用領域。這包括但不限于自動駕駛、地質和地理測繪、地震學、氣象學、大氣物理學、監視、測高、林業、導航、車輛跟蹤、測量和環境保護。
02
激光雷達配置
為了匹配許多不同的應用,激光雷達系統有多種設計和配置。每個系統都需要合適的光電傳感器和合適的數據采集電子設備。光檢測系統要么是非相干的,其中直接能量通過反射信號的幅度變化來測量,要么是相干的,其中反射信號的頻率偏移,例如由多普勒效應引起的偏移,或其相位被觀察到。類似地,光源可以是低功率微脈沖設計,其中傳輸間歇性脈沖序列,也可以是高能量設計。微脈沖系統非常適合“人眼安全”操作必不可少的應用(例如測量和地面車輛跟蹤),而高能系統通常部署在會遇到長距離和低水平反射的地方 (如大氣物理學和氣象學研究)。
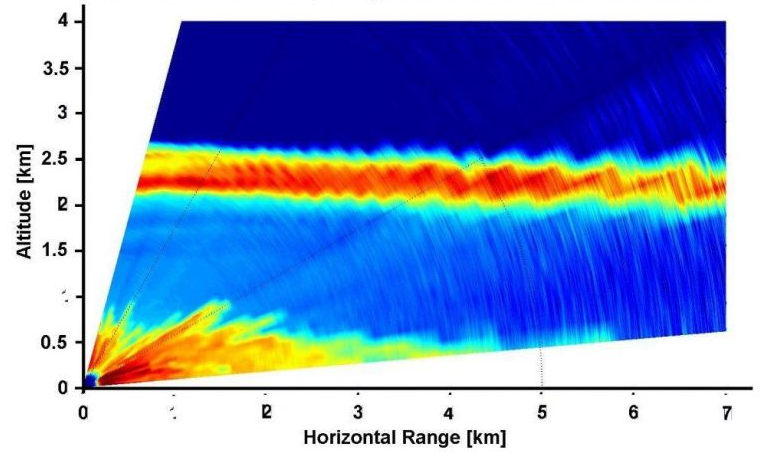
大氣激光雷達掃描
每個激光雷達系統都需要使用合適的傳感器來檢測反射的激光信號并將其轉換為電信號。最常見的傳感器類型是光電倍增管 (PMT) 和固態光電探測器(例如光電二極管)。通常,PMT 用于使用可見光的應用,而光電二極管在紅外系統中更為常見。然而,這兩種傳感器類型都被廣泛使用,選擇在很大程度上取決于需要檢測的光特性、所需的性能水平和成本。
最重要的是,傳感器會產生需要采集和分析的快速電信號。對于大多數 LIDAR 應用,最流行的信號捕獲卡類型是 PCIe,因為這使它們能夠直接安裝在大多數現代 PC 中。 PCIe 是許多數字化儀供應商提供的一種類型,這是創建功能強大、易于使用的數據采集系統的簡單方法。 由于 PCIe 總線提供非常高的數據吞吐率,信號采集、數據傳輸和分析功能通常比其他更傳統的采集系統快得多。 虹科Spectrum還提供其他的行業標準,例如 digitizerNETBOX,一種基于 LXI/以太網的緊湊型設備或 PXIe,它們是具有空間限制或振動問題的移動環境(例如機載或移動 LIDAR)的不錯選擇。
03
激光雷達性能等級
對于 LIDAR 應用,存在三個獨立的性能等級:
01
對于最快的光脈沖
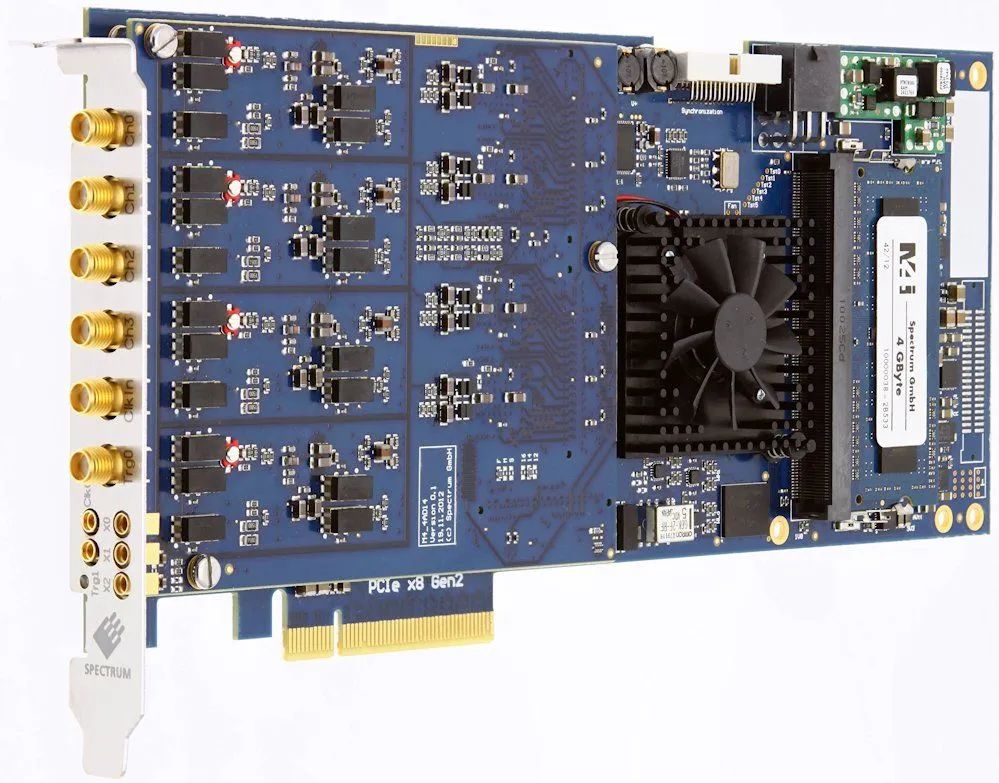
為了捕獲和分析非常快的信號,采集卡需要高達 10 GS/s 的采樣率和超過 1 GHz 的高帶寬。此類數字化儀的一個示例是虹科M5i.33xx 系列,它在 PCIe 平臺上為每張卡提供多達 2 個通道,具有 12 位分辨率和高達 6.4 GS/s 的采樣率。虹科M4i.22xx 系列在 PCIe 和 PXIe 平臺上為每張卡提供多達 4 個通道,在 LXI 平臺上提供多達 24 個通道。這種組合使這些卡非常適合與產生納秒甚至亞納秒范圍內的脈沖的快速傳感器一起使用。 此外,5 GS/s 的快速采樣率可實現亞納秒分辨率的定時測量。它非常適用于需要檢測和測量小頻移的情況,例如由多普勒效應產生的頻移。

虹科M4i.22xx 系列
02
適用于低電平信號和高靈敏度
當需要寬信號動態范圍和非常高的靈敏度時,采集卡需要能夠以幾百 MS/s 的采樣率和匹配的帶寬采集幅度降至毫伏范圍的信號。垂直分辨率要高,最好是16位。一個示例是 虹科 M4i.44xx 系列,在 500 MS/s 時具有 14 位分辨率或在 250 MS/s 時具有 16 位分辨率。這些裝置還具有從 ±200 mV 到 ±10 V 的可編程滿量程增益范圍,使其適用于需要觀察和測量低電平信號和小幅度變化的應用。
虹科M4i.44xx 系列
03
具有成本效益的中檔性能
第三組適用于需要高靈敏度但對時序要求不高的應用。高達 100 MS/s 的采樣率和 16 位垂直分辨率,如虹科M2p.59xx 系列產品,適合該應用領域。這些裝置用于需要高信號靈敏度的遠程 LIDAR 應用,也用于需要高密度、多通道記錄的情況。
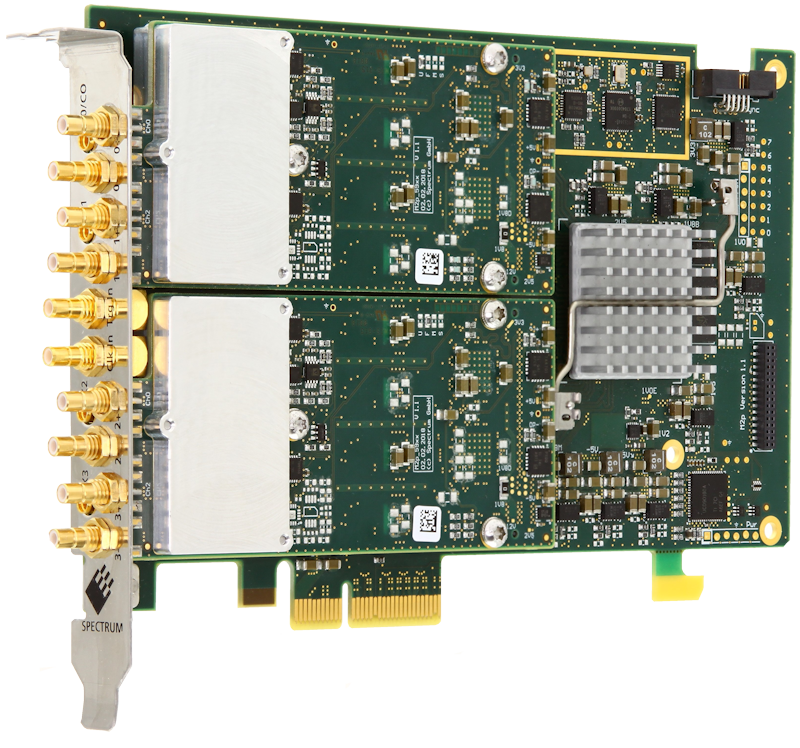
虹科M2p.59xx 系列
04
激光雷達應用中需要滿足的高級功能
數字化儀包括多種不同的采集模式,可有效使用數字化儀的板載內存并提供超快觸發功能,因此不會遺漏任何重要事件。這些模式包括多采集和門控采集,帶有時間戳、FIFO 流或基于 FPGA 的高速塊平均。
05
如何處理海量數據?
第一種方法只是將數據發送到主機 PC 的 CPU。這種傳統方法提供了一種簡單的解決方案。用戶可以根據供應商的API編寫自己的分析程序,也可以使用第三方測量軟件,如虹科SBench 6、MATLAB和LabVIEW。整體性能和測量速度隨后受到 CPU 可用資源的限制。在要求苛刻的應用程序中,這是一個問題,因為 CPU 與 PC 系統的其余部分共享其處理能力,并控制數據傳輸。
第二種方法使用 FPGA 技術——現場可編程門陣列。 這是一個強大的解決方案,但它的成本和復雜性要高得多。大型 FPGA 價格昂貴,并且創建自定義固件需要數字化儀的 FDK、FPGA 供應商提供的工具以及專門的硬件編程工程技能。創建固件并不適合所有人,即使是經驗豐富的開發人員也會陷入漫長的開發周期。此外,該解決方案受到實際位于數字化儀上的 FPGA 的限制。例如,如果可用的塊 RAM 已用完,則無能為力。
激光雷達數字化儀到 GPU
第三種方法是SCAPP。它由虹科 Spectrum創建,是一種新方法。SCAPP使用基于 Nvidia 的 CUDA 標準的標準現成 GPU(圖形處理器單元)。GPU 直接與數字化儀連接,無需 CPU 交互。這開啟了GPU用于信號處理的巨大并行核心架構,擁有數百甚至數千個處理核心、數GB的內存和高達12 Tera-FLOP的計算速度。CUDA 卡的結構非常適合分析,因為它專為并行數據處理而設計。這使其成為數據轉換、數字濾波、平均、基線抑制、FFT 窗口函數甚至 FFT 本身等任務的理想選擇,因為它們很容易并行處理。例如,具有 1k 內核和 3.0 Tera-FLOP 計算速度的小型 GPU 已經能夠在 FFT 塊大小為 512k 的兩個通道上以每秒 500 兆樣本的速度進行連續數據轉換、多路復用、窗口化、FFT 和平均,并且它 可以運行幾個小時。
將 SCAPP 方法與基于 FPGA 的解決方案進行比較,揭示了總體擁有成本的巨大節省。所需要的只是匹配的 CUDA GPU 和軟件開發工具包。但是,最大的成本節省是項目開發時間。用戶無需花費數周時間試圖了解供應商的 FDK、FPGA 固件的結構、FPGA 設計套件和仿真工具,而是可以立即開始使用以易于理解的 C 代碼編寫的示例并使用通用設計工具。
-
探測
+關注
關注
0文章
210瀏覽量
20341 -
虹科電子
+關注
關注
0文章
602瀏覽量
14352 -
LIDAR
+關注
關注
10文章
326瀏覽量
29425
發布評論請先 登錄
相關推薦
虹科應用 | 實時監控與控制:虹科PCAN在工程機械的全方位應用

虹科培訓 | 重磅來襲!波形分析課程全面上線!
虹科活動回顧 | 波形診斷開放日-上海站圓滿落幕!
虹科培訓 | 重磅升級!全新模式月底開班,你想學的都在這里!
虹科應用 為什么虹科PCAN方案能成為石油工程通訊的首選?
高速數字化儀的技術原理和應用場景
虹科方案 領航智能交通革新:虹科PEAK智行定位車控系統Demo版亮相

虹科應用 當CANoe不是唯一選擇:發現虹科PCAN-Explorer 6
虹科案例|為什么PCAN MicroMod FD是數模信號轉換的首選方案?
虹科新品 | E-Val Pro Plus有線驗證解決方案
虹科分享丨無線數據記錄儀與傳統有線熱電偶系統的對比優勢

提高生產效率!虹科MSR165快速檢測機器故障,實現精準優化
虹科分享 | PCAN工具:強大的CAN通訊解決方案,你了解多少?
虹科數字化與AR部門升級為安寶特AR子公司

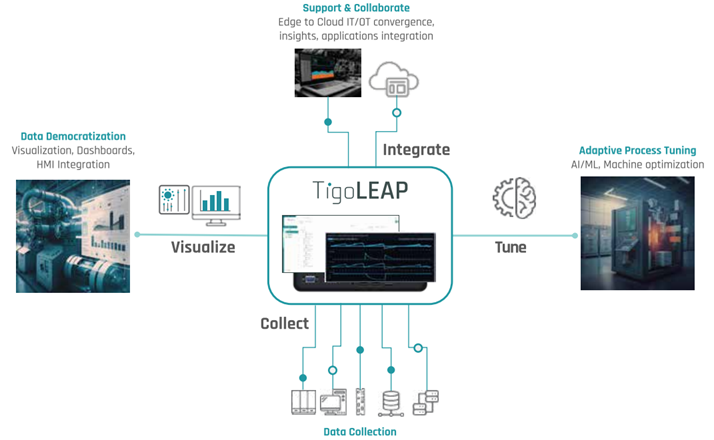
虹科方案|從困境到突破:TigoLeap方案引領數據采集與優化





 工商網監
工商網監
評論