 國內外電動汽車整車控制器(VCU)性能指標及設計思路
國內外電動汽車整車控制器(VCU)性能指標及設計思路
貞光科技從車規微處理器MCU、功率器件、電源管理芯片、信號處理芯片、存儲芯片、二、三極管、光耦、晶振、阻容感等汽車電子元器件為客戶提供全產業鏈供應解決方案!
一、國外產品介紹
豐田公司整車控制器的原理圖如下圖所示:
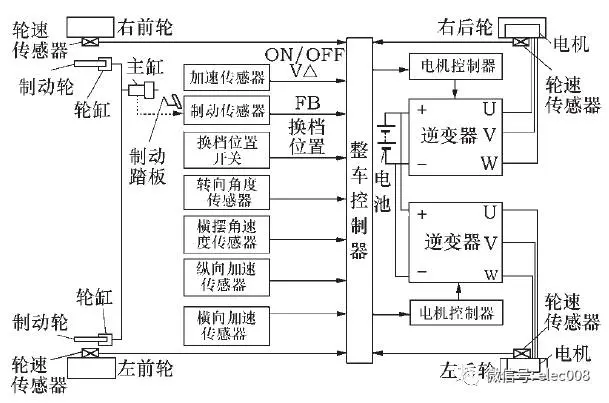
該車是后輪驅動,左后輪和右后輪分別由2個輪轂電機驅動。
其整車控制器接收駕駛員的操作信號和汽車的運動傳感器信號,其中駕駛員的操作信號包括加速踏板信號、制動踏板信號、換檔位置信號和轉向角度信號,汽車的運動傳感器信號包括橫擺角速度信號、縱向加速信號、橫向加速信號和4個車輪的轉速信號。
整車控制器將這些信號經過控制策略計算,通過左右2組電機控制器和逆變器分別驅動左后輪和右后輪。
(2)日立公司整車控制器
日立公司純電動汽車整車控制器的原理圖如下圖所示。
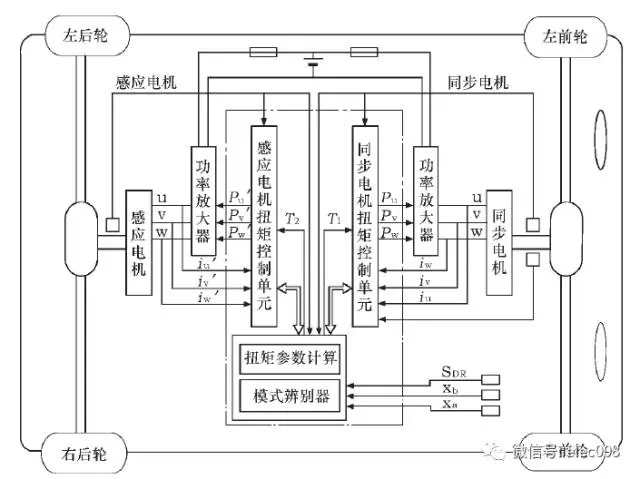
圖中電動汽車是四輪驅動結構, 其中前輪由低速永磁同步電機通過差速器驅動,后輪由高速感應電機通過差速器驅動。
整車控制器的控制策略是在不同的工況下使用不同的電機驅動電動汽車,或者按照一定的扭矩分配比例,聯合使用2臺電機驅動電動汽車,使系統動力傳動效率最大。
當電動汽車起步或爬坡時,由低速、大扭矩永磁同步電機驅動前輪。當電動汽車高速行駛時,由高速感應電機驅動后輪。
(3)日產公司整車控制器
日產聆風LEAF是5門5座純電動轎車,搭載鋰離子電池,續駛里程是160km。采用200V家用交流電,大約需要8h可以將電池充滿;快速充電需要10min,可提供其行駛50km的用電量。
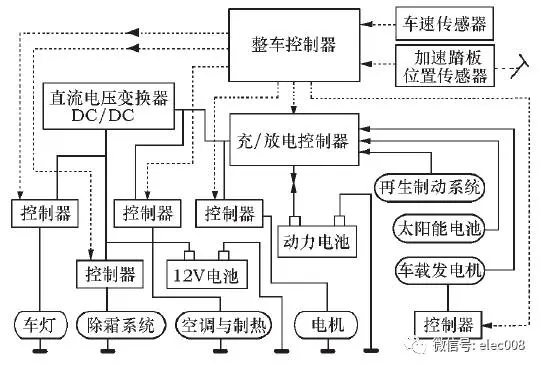
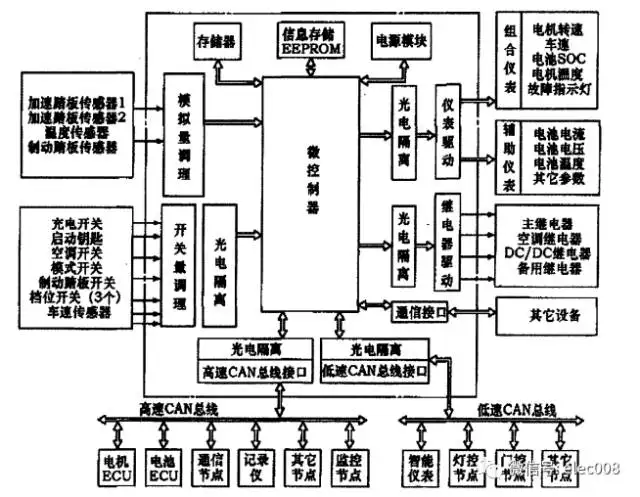
日產聆風LEAF的整車控制器原理圖如下圖所示,它接收來自組合儀表的車速傳感器和加速踏板位置傳感器的電子信號,通過子控制器控制直流電壓變換器DC/DC、車燈、除霜系統、空調、電機、發電機、動力電池、太陽能電池、再生制動系統。
該控制器可兼容12V及24V兩種供電環境,可用于新能源乘用車、商用車電控系統,作為整車控制器或混合動力控制器。該控制器對新能源汽車動力鏈的各個環節進行管理、協調和監控,以提高整車能量利用效率,確保安全性和可靠性。
該整車控制器采集司機駕駛信號,通過CAN總線獲得電機和電池系統的相關信息,進行分析和運算,通過CAN總線給出電機控制和電池管理指令,實現整車驅動控制、能量優化控制和制動回饋控制。具備完善的故障診斷和處理功能。
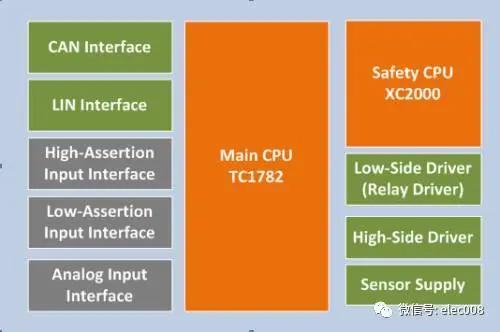
此外,該控制器還采用專門加入了一個16位處理器單元用于實現針對主處理器的安全監控及Safety IO的控制。
性能指標:
主控制器:Infineon 32-bit TC1782
安全控制器:Infineon 16/32bit XC2000
工作電壓范圍:9~32V;
工作溫度范圍:-40~105;
通訊接口:3-chn *CAN;1-chn*LIN;
數字輸入:26-chn
模擬輸入:6-chn*10-bit@0~5V;7-chn*12-bit@0~12V;
低邊驅動:>14-chn;
高邊驅動:>7-chn;
傳感器供電:>1-chn@ Vbat;4-chn@5V;
樣件圖片:
二、國內產品
國內市場的整車控制器主要由一些高校和研究單位研發。其技術方案是通過微處理器的嵌入結構,編寫控制軟件代碼,實現高效率驅動純電動汽車的功能。它一般采集加速踏板、制動踏板、換檔位置、車速等信號,使用CAN總線與電機控制器和電池管理系統通信,實現對整車的管理與控制。
(1)天津清源電動車輛有限責任公司和一汽天津夏利股份有限公司牽頭,中國汽車技術研究中心、天津大學、天津和平海灣公司和天津藍天高科公司等十幾個單位共同參與合作開發出XL2000型純電動轎車。其控制系統如下圖所示。
該電動汽車采用集中電機驅動方式,利用CAN通訊總線連接各個控制節點。整車控制器對采集到的模擬量、開關量以及其他控制單元反饋的數據進行綜合處理,判斷車輛行駛工況,控制電機以及其他部件協調工作,保證純電動汽車的正常行駛。
(2)眾泰公司整車控制器
眾泰2008EV是眾泰汽車集團開發的國內第1款純電動SUV汽車,2009年3月參加上海車展。2010年7月,眾泰5008EV純電動車以10.08萬元出售給了杭州一位個人客戶,成為中國首臺掛牌上路的純電動汽車。
眾泰5008EV采用鋰離子動力電池,配置了車載充電機,可選擇家用電源充電模式或快速充電模式進行充電。最大功率是27 kW,最高車速可達110km/h,充滿電后續駛里程為300 km,百公里的耗電僅12kW·h。
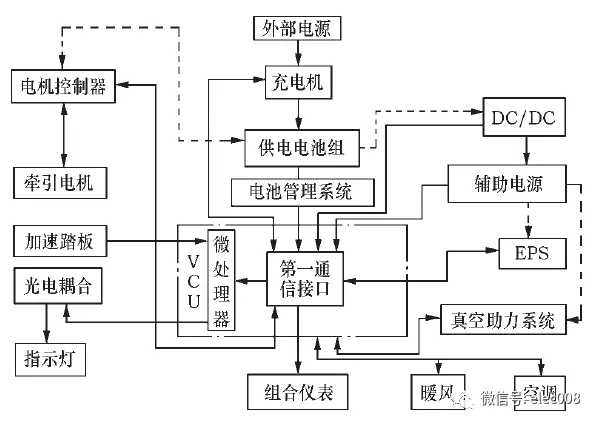
目前,眾泰5008EV在享受國家6萬元補貼及杭州市地方補貼之后,價格是10.08萬元。眾泰2008EV的整車控制器 (VCU) 原理圖如下圖所示。
它連接加速踏板、控制電機控制器、電池管理系統、直流電壓變換器DC/DC、電動助力轉向系統EPS、真空助力系統、空調系統、組合儀表。整車控制器能夠統計整車所有電器設備的功耗,對比動力電池能夠提供的電量,根據功率模型計算結果,輸出控制器指令信號至電機控制器,電機控制器調整牽引電機的轉矩值。
當整車控制器接收到加速踏板輸入的功率需求信息后,根據整車所有電器設備的功率分配情況和電池管理系統輸入的供電電池的電壓、電流等信息進行綜合分析,合理地調整牽引電機的扭矩輸出,保證其具有足夠的牽引力。
三、國內某公司整車控制器詳細介紹
1、描述:
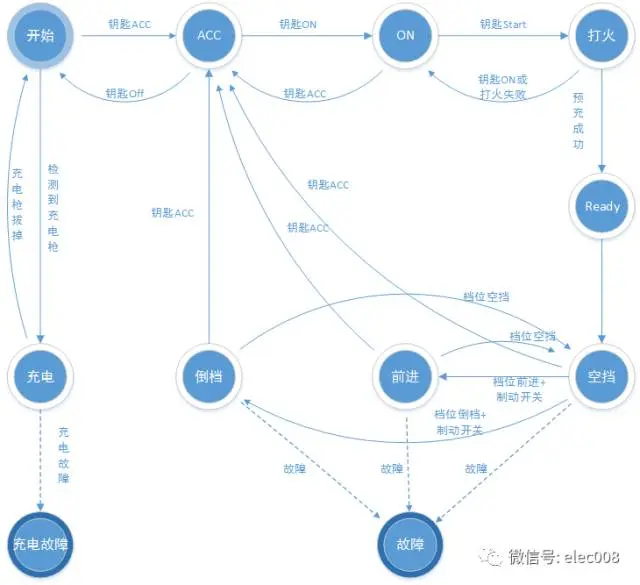
整車控制器是純電動汽車的核心控制器件,主要功能為采集車輛信息、駕駛員意圖,控制車輛運行,診斷車輛故障等。
整車部件拓撲:
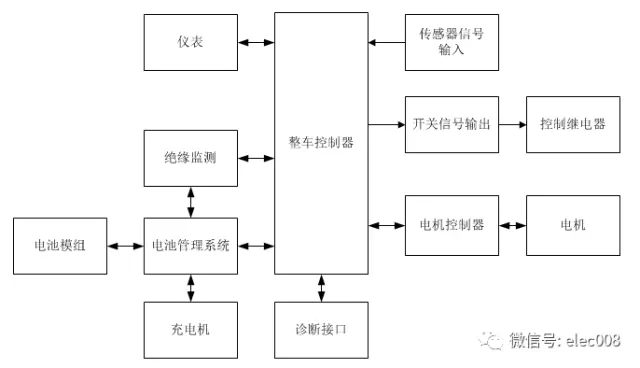
主要功能:VCU完成對車輛各個模塊的監控和通訊,是整車的“大腦”。
(1) 車輛駕駛:采集司機的駕駛需求,管理車輛動力分配;
(3) 儀表的輔助驅動;
(4) 故障診斷處理:診斷傳感器、執行器和系統其他部件故障并進行相應的故障處理,按照標準格式存儲故障碼。標準故障碼顯示;
(5) 在線配置和維護:通過車載標準CAN端口,進行控制參數修改,匹配標定,功能配置,監控,基于標準接口的調試能力等;
(6) 能量管理:通過對電動汽車車載耗能系統(如空調、電動泵等)的協調和管理,以獲得最佳的能量利用率;
(7) 功率分配:通過綜合車輛信息、電池和電機信息計算電機功率的分配,進行車輛的驅動控制和制動能量回饋控制。從而在系統允許范圍內獲得最佳的駕駛性能;
(8)真空助力泵的控制及故障診斷,真空泵故障時電制動輔助控制;
(9)坡道駐車輔助控制;
(10)坡道起步時防止后溜控制。
VCU性能參數——硬件性能參數:
(1)工作特性參數
工作電壓范圍:9~18V
功率消耗: ≤50W
儲存環境溫度: -40℃~90℃
工作環境溫度: -40℃~85℃
工作濕度: ≤90%,不結露
指令執行速度: ≥20MIPS
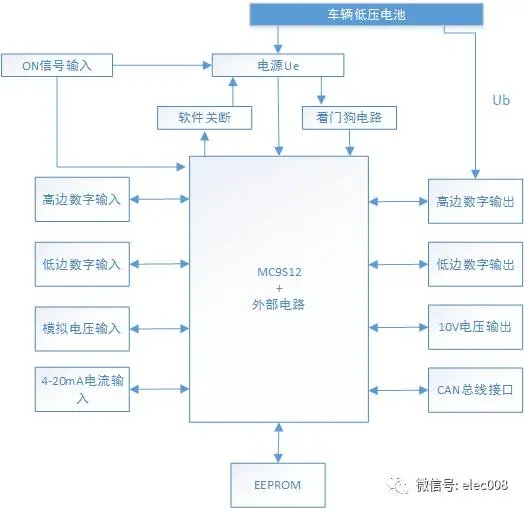
(2)I/O功能指標
采集油門踏板、剎車踏板、鑰匙信號、檔位信號等,控制車輛部件開關。
6 路模擬電壓輸入: 分辨率12bit,量程為0-5V
2 路模擬電流輸入: 分辨率12bit,量程為0-20mA
10 路高邊數字輸出: 最大輸出電流2A
2路大功率高邊數字輸出:最大輸出電流11A
4 路低邊數字輸出: 最大吸收電流1A
10 路高邊數字輸入: 邏輯1閾值≥8V
8 路低邊數字輸入: 邏輯0閾值≤6V
電路噪聲: ≤10mV
(3)通訊功能:
完成與電機控制器、電池管理系統、儀表系統的CAN總線通信,波特率達到250KHz,兼容J1939標準。三路獨立CAN總線,高可擴展性。
(4)可靠性、電磁兼容性方面滿足:
防護等級 QC/T413-2002 IP65
抗震 QC/T413-2002
電磁兼容性 GB/T18655-2002
GB/T17619-1998
GB/T21437.2-2008
耐電壓 QC/T413-2002,具有過壓、過流、短接、反接保護
耐鹽霧性 24h鹽霧試驗后,產品內部干燥、無腐蝕現象,常溫正常使用
溫度沖擊 電子控制器經10個循環(溫度范圍:-40~85℃)轉換時間:<10 s;停留時間:-40℃時停留40 min、90℃時停留20 min溫度沖擊試驗后,能滿足常溫正常使用的要求
平均無故障時間 ﹥6000小時
2、技術優勢和特色:
1)優秀的硬件電路設計、接口保護、電磁防護設計、器件選型等硬件系統是整車控制器的硬件基礎,是驅動軟件、應用軟件、網絡調試、控制策略運行的載體。強力穩定的硬件設計可以提高整個系統的穩定性、可靠性,減少故障率。
a、四層電路板,中間層是電源層和地層,電平穩定
b、數字電路電源與功率電路電源分開,數字地與功率地分割設計,減少耦合干擾
c、隔離的CAN總線設計,避免總線網絡受到串擾的影響,2500VRMS隔離
d、頂層和地層電路板采用1OZ加厚鋪銅,銅厚約35um
e、電路板四周采用穿孔地墻設計,屏蔽電磁輻射
f、端口EMI(Electro Magnetic Interference) 防電磁干擾設計,采用信號硬件濾波,浪涌保護器件
g、采用美國Freescale公司專為汽車級電子設計的16位微控制器MC9S12XEQ512為核心控制芯片。MC9S12XEQ512具有32K內部RAM,512KB片內Flash Memory,4K內部EEPROM和32K片內D-Flash,5路MSCAN,2路分離的12位A/D,2路SCI,3路SPI,工作溫度范圍-40至+125℃,40MHz時鐘
h、整車器件選型依照汽車級標準,保證在溫度、震動、形變方面具備汽車級標準
2)實時控制軟件,有限狀態機模式處理事件
整車軟件采用實時控制,采樣間隔時間1ms。采用合理的底層驅動編寫,減少處理時間,為上層應用程序的駕駛員意圖判斷、策略解析等提供支持。
3、針對輕卡設計的能量控制策略
(1)在線程序更新、匹配標定、離線故障診斷支持軟件開發根據在線程序更新工具的需求,在動力總成控制器中嵌入基于CAN通訊協議的程序更新接口;根據ISO15765或SAE J1939/73協議標準,在VCU中嵌入基于CAN協議的故障診斷軟件的支持接口。這些接口將為整車控制器的更新、優化、診斷帶來便利。
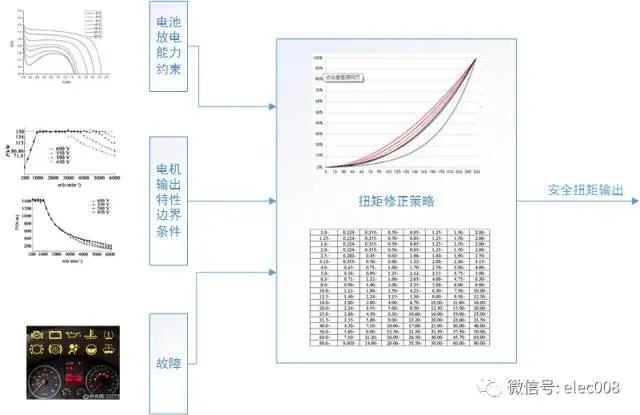
(2)驅動控制器策略
電動卡車需要根據實際使用工況,制定適合車輛的運行策略,以達到提高運行效率,減少能量消耗的目的。由此,在響應駕駛員加速踏板、剎車踏板等信息時就需要結合當前車輛狀態進行修正、并輸出合適的動力。
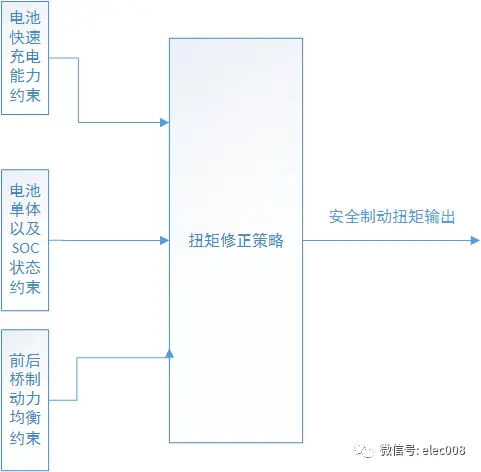
(3)能量回饋策略
能量回饋是指車輛在制動時利用電機特性進行電能反饋到動力電池同時產生制動力矩的一種能量回收策略。其制動扭矩安全輸出問題由以下條件約束:電池快速充電能力約束,電池單體以及SOC狀態約束,前后橋制動力平衡約束。
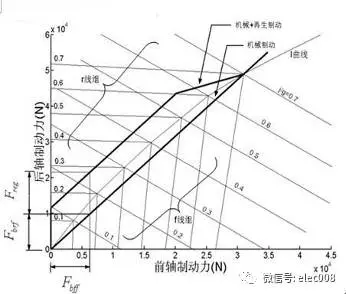
再生制動導致的車輛前后軸制動力分配不均問題,保證ABS系統的可靠性和整車制動系統標準。
如下圖所示,如仍采用傳統車的定比例制動力分配策略,新的“機械+再生制動”分配曲線將會在I曲線之上,在附著力低的路面上會出現后輪先抱死的不穩定工況,影響ABS系統的可靠性。要研究電動卡車專用制動系統,以保證整車制動系統達到標準要求。
回饋制動策略:限制最大回饋制動力,同時在輪速低于一定閾值時,退出能量回饋制動。
(4)故障處理策略
嚴格故障分類分級,根據實際情況制定故障處理機制,保證車輛安全運行。
對故障進行三個等級分類:
a、低等級故障:儀表聲光報警,車輛繼續運行;.
b、中等級故障:儀表聲光報警,車輛50%功率運行,儀表提示降功率;
c、高等級故障:儀表聲光報警,停車,斷高壓(絕緣電阻、短路、碰撞)。
*免責聲明:本文由作者原創。文章內容系作者個人觀點,貞光科技二次整理,不代表貞光科技對該觀點贊同或支持,僅為行業交流學習之用,如有異議,歡迎探討。
-
電動汽車
+關注
關注
156文章
12087瀏覽量
231275 -
控制器
+關注
關注
112文章
16365瀏覽量
178075 -
VCU
+關注
關注
17文章
80瀏覽量
20562
發布評論請先 登錄
相關推薦
射頻濾波器的性能指標

高頻電路的主要性能指標有哪些
CANFD芯片應用中關鍵功能和性能指標分析
CPU主要性能指標有哪些
揚聲器的結構和性能指標
放大電路的性能指標有哪些
階躍響應的性能指標包括哪些
瞬態響應的性能指標包括哪些
6芯M16插座有哪些性能指標優勢呢

控制系統的性能指標有哪些
工控主板的性能指標有哪些?

模數轉換器的性能指標
從0到1實現VCU:新能源汽車整車控制器






 工商網監
工商網監
評論