 PID到底是個什么?舉個例子告訴你
PID到底是個什么?舉個例子告訴你
什么是PID?
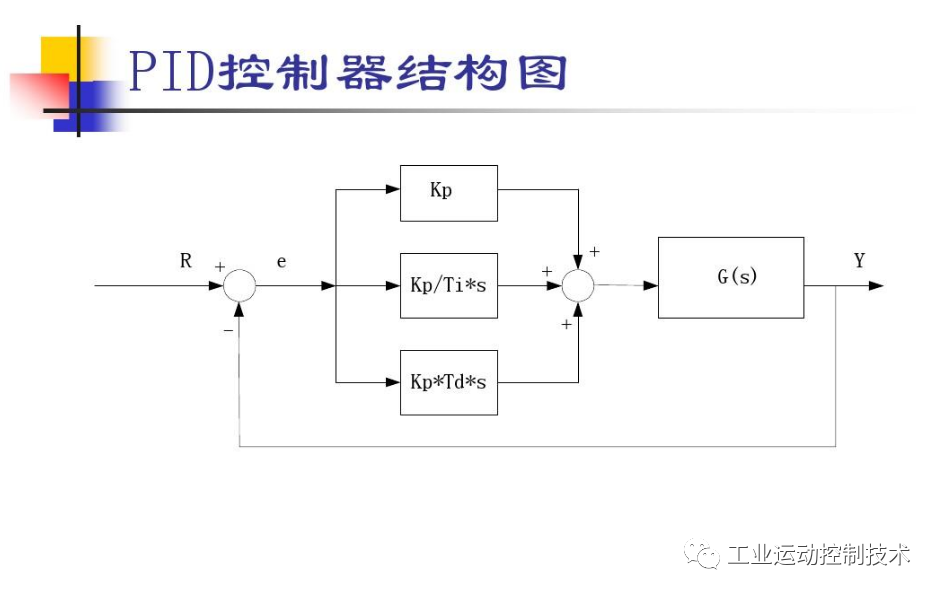
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。
PID已經有107年的歷史了。
它并不是什么很神圣的東西,大家一定都見過PID的實際應用。
比如四軸飛行器,再比如平衡小車......還有汽車的定速巡航、3D打印機上的溫度控制器....
就是類似于這種:需要將某一個物理量“保持穩定”的場合(比如維持平衡,穩定溫度、轉速等),PID都會派上大用場。PID應用相關文章,點擊閱讀:應用PID控制,讓機器人學會騎自行車。
那么問題來了:
比如,我想控制一個“熱得快”,讓一鍋水的溫度保持在50℃,這么簡單的任務,為啥要用到微積分的理論呢。關于PID原理,也可以看這篇文章:PID算法原理介紹。
你一定在想:
這不是so easy嘛~ 小于50度就讓它加熱,大于50度就斷電,不就行了?幾行代碼用Arduino分分鐘寫出來。
沒錯~在要求不高的情況下,確實可以這么干~ But!如果換一種說法,你就知道問題出在哪里了:如果我的控制對象是一輛汽車呢?
要是希望汽車的車速保持在50km/h不動,你還敢這樣干么。設想一下,假如汽車的定速巡航電腦在某一時間測到車速是45km/h。它立刻命令發動機:加速!結果,發動機那邊突然來了個100%全油門,嗡的一下,汽車急加速到了60km/h。這時電腦又發出命令:剎車!結果,吱...............哇............(乘客吐) 所以,在大多數場合中,用“開關量”來控制一個物理量,就顯得比較簡單粗暴了。有時候,是無法保持穩定的。因為單片機、傳感器不是無限快的,采集、控制需要時間。而且,控制對象具有慣性。比如你將一個加熱器拔掉,它的“余熱”(即熱慣性)可能還會使水溫繼續升高一小會。
這時,就需要一種『算法』:
它可以將需要控制的物理量帶到目標附近
它可以“預見”這個量的變化趨勢
它也可以消除因為散熱、阻力等因素造成的靜態誤差
....
于是,當時的數學家們發明了這一歷久不衰的算法——這就是PID。你應該已經知道了,P,I,D是三種不同的調節作用,既可以單獨使用(P,I,D),也可以兩個兩個用(PI,PD),也可以三個一起用(PID)。這三種作用有什么區別呢?客官別急,聽我慢慢道來
我們先只說PID控制器的三個最基本的參數:kP,kI,kD。kPP就是比例的意思。它的作用最明顯,原理也最簡單。我們先說這個:需要控制的量,比如水溫,有它現在的『當前值』,也有我們期望的『目標值』。
當兩者差距不大時,就讓加熱器“輕輕地”加熱一下。
要是因為某些原因,溫度降低了很多,就讓加熱器“稍稍用力”加熱一下。
要是當前溫度比目標溫度低得多,就讓加熱器“開足馬力”加熱,盡快讓水溫到達目標附近。
這就是P的作用,跟開關控制方法相比,是不是“溫文爾雅”了很多。
實際寫程序時,就讓偏差(目標減去當前)與調節裝置的“調節力度”,建立一個一次函數的關系,就可以實現最基本的“比例”控制了~ kP越大,調節作用越激進,kP調小會讓調節作用更保守。
要是你正在制作一個平衡車,有了P的作用,你會發現,平衡車在平衡角度附近來回“狂抖”,比較難穩住。平衡車項目:STM32平衡小車。如果已經到了這一步——恭喜你!離成功只差一小步了~kDD的作用更好理解一些,所以先說說D,最后說I。
剛才我們有了P的作用。你不難發現,只有P好像不能讓平衡車站起來,水溫也控制得晃晃悠悠,好像整個系統不是特別穩定,總是在“抖動”。
你心里設想一個彈簧:現在在平衡位置上。拉它一下,然后松手。這時它會震蕩起來。因為阻力很小,它可能會震蕩很長時間,才會重新停在平衡位置。請想象一下:要是把上圖所示的系統浸沒在水里,同樣拉它一下 :這種情況下,重新停在平衡位置的時間就短得多。
我們需要一個控制作用,讓被控制的物理量的“變化速度”趨于0,即類似于“阻尼”的作用。
因為,當比較接近目標時,P的控制作用就比較小了。越接近目標,P的作用越溫柔。有很多內在的或者外部的因素,使控制量發生小范圍的擺動。D的作用就是讓物理量的速度趨于0,只要什么時候,這個量具有了速度,D就向相反的方向用力,盡力剎住這個變化。kD參數越大,向速度相反方向剎車的力道就越強。
如果是平衡小車,加上P和D兩種控制作用,如果參數調節合適,它應該可以站起來了~歡呼吧。等等,PID三兄弟好像還有一位。看起來PD就可以讓物理量保持穩定,那還要I干嘛?因為我們忽視了一種重要的情況:kI還是以熱水為例。假如有個人把我們的加熱裝置帶到了非常冷的地方,開始燒水了。需要燒到50℃。
在P的作用下,水溫慢慢升高。直到升高到45℃時,他發現了一個不好的事情:天氣太冷,水散熱的速度,和P控制的加熱的速度相等了。這可怎么辦?
P兄這樣想:我和目標已經很近了,只需要輕輕加熱就可以了。
D兄這樣想:加熱和散熱相等,溫度沒有波動,我好像不用調整什么。
于是,水溫永遠地停留在45℃,永遠到不了50℃。作為一個人,根據常識,我們知道,應該進一步增加加熱的功率。可是增加多少該如何計算呢?前輩科學家們想到的方法是真的巧妙。
設置一個積分量。只要偏差存在,就不斷地對偏差進行積分(累加),并反應在調節力度上。
這樣一來,即使45℃和50℃相差不太大,但是隨著時間的推移,只要沒達到目標溫度,這個積分量就不斷增加。
系統就會慢慢意識到:還沒有到達目標溫度,該增加功率啦!到了目標溫度后,假設溫度沒有波動,積分值就不會再變動。這時,加熱功率仍然等于散熱功率。但是,溫度是穩穩的50℃。kI的值越大,積分時乘的系數就越大,積分效果越明顯。
所以,I的作用就是,減小靜態情況下的誤差,讓受控物理量盡可能接近目標值。I在使用時還有個問題:需要設定積分限制。防止在剛開始加熱時,就把積分量積得太大,難以控制。
-
控制
+關注
關注
4文章
1013瀏覽量
122708 -
PID
+關注
關注
35文章
1473瀏覽量
85651
發布評論請先 登錄
相關推薦
ADS7864采樣頻率到底是由外部時鐘決定還是HOLDX信號頻率決定?
LM629 PID參數調節,所謂的高頻震蕩到底是什么意思?
TLV320AIC3254內部中的ADC處理模塊和minidsp到底是什么關系?
干貨推薦!相位補償到底是什么鬼?
求助,關于STM32中的極性疑問求解
共享單車到底是什么通信原理







 工商網監
工商網監
評論