 焊接變位機的主要組成結構及運動特點
焊接變位機的主要組成結構及運動特點
無錫金紅鷹工業自動化有限公司是一家設計生產工業機器人及提供機器人工業自動化系統解決方案的高新技術企業。如果您對焊接機器人感興趣,可以聯系無錫金紅鷹,我們是專業的工業機器人集成商,提供機器人系統設計、生產、銷售及售后一站式服務。
焊接變位機主要的組成原理有:控制的裝置、操作的裝置、工藝的保障裝置和動力源的裝置四大類。
一、控制的裝置:主要的組成是電氣的控制系統,可以對變位機在整個工作的狀態進行控制;
二、操作的裝置:包含的有垂直的導向機構、導軌、焊槍、焊槍夾和傾角的調節機構等,其中傾角的調節機構可以保障焊槍繞中心進行正負的旋轉焊接。
三、工藝包裝的裝置:組成有導絲嘴、導絲的機構和焊絲的導管,能夠實現焊絲自動的導向和定位,保證整個焊縫的質量。
四、動力源的裝置:在組成上主要是氣缸,采用的是氣壓的驅動來對動力進行傳送。

無錫金紅鷹單軸水平回轉變位機
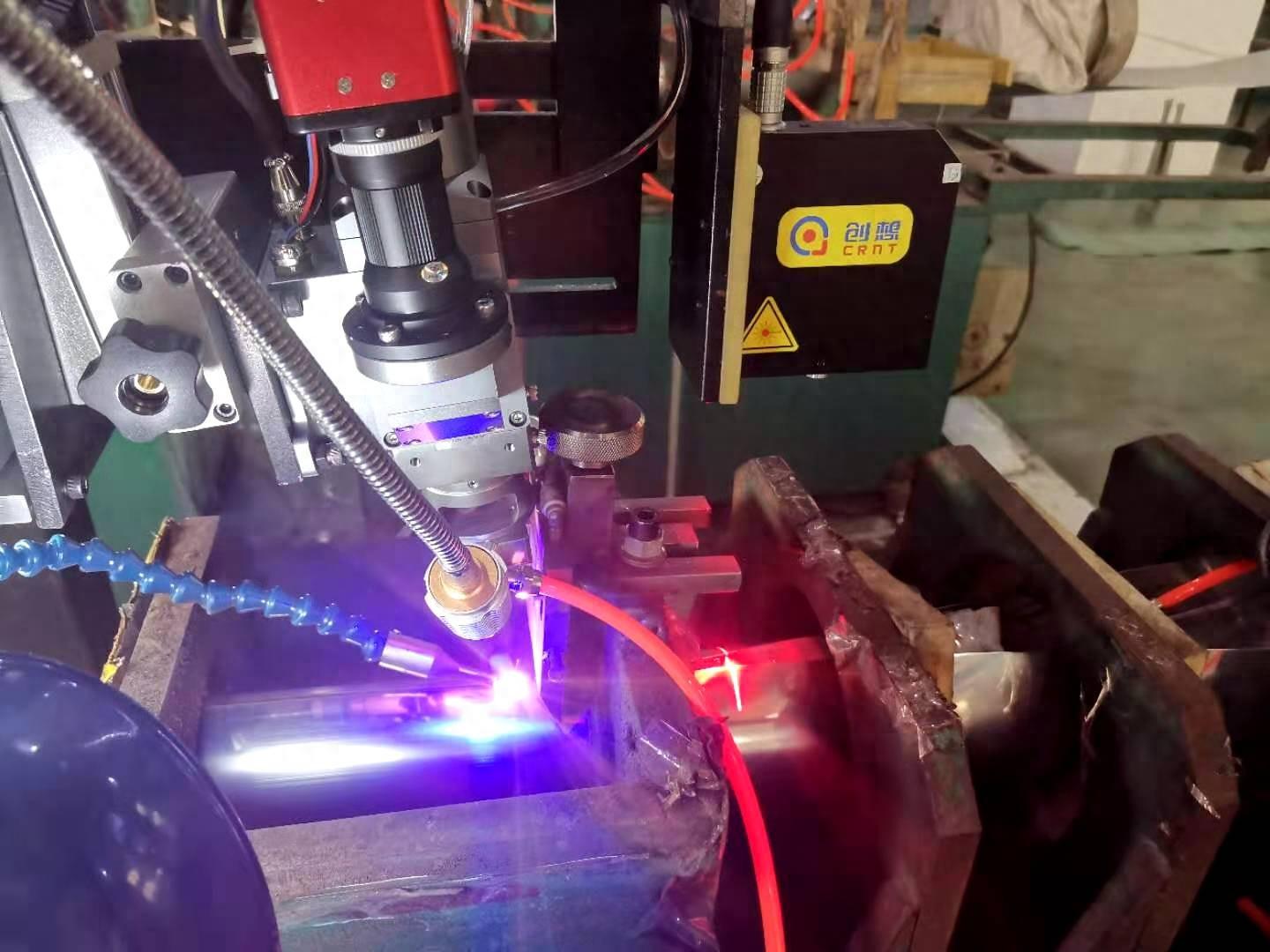
焊接變位機是一種安裝用于將焊頭或焊槍發送并堅持在待焊接的位置,或者以選定的焊接速度沿指定軌跡挪動焊劑,應遵守以下原則:
標準計劃優化原則當計劃需要一些工作空間請求時,經過標準優化選擇小臂標準,利于加強變位機的剛度,進一步減小運動慣性。高強度數據的選擇規范。由于設備的從伎倆、手臂、手臂到框架依次充任負載,所以高強度數據的選擇規范應該是降低零件的質量。

無錫金紅鷹雙軸U型變位機
較小的運動慣量原則由于焊接變位機,中有許多運動部件,運動狀態經常發作變化,沖擊和振動將不可防止地發作。選擇較小的運動慣量原則能夠加強設備的運動穩定性,改進其動態特性。
因而,在符合強度和剛度的前提下,應留意盡可能減小運動部件的質量,并留意運動部件對轉軸質心的設備。在焊接變位機計劃中,剛度比強度重要。為了使剛度大,需要合理選擇桿件的截面外形和規格,行程支撐剛度和接觸剛度,合理布置作用在臂上的力和力矩,盡量減小桿件的彎曲變形。
審核編輯黃宇
-
機器人
+關注
關注
211文章
28467瀏覽量
207353 -
焊接
+關注
關注
38文章
3150瀏覽量
59844
發布評論請先 登錄
相關推薦
直流無刷電機的主要特點是什么?直流無刷電機具體可以組成哪些結構?

bnc母頭免焊接的典型結構特點

簡述毫米波雷達的結構、原理和特點
深度剖析:MT6816 磁編碼 IC 在機器人焊接變位機中的應用
激光焊接技術在焊接醫療介入導絲的特點有哪些

激光焊接技術在焊接醫療耳內窺鏡的工藝特點

手持激光焊接機特點

運動控制系統由什么組成
激光焊接機在焊接內窺鏡的技術特點

關于直線電機的運動形式、結構以及力的計算

焊接質量缺陷產生的主要原因

激光焊接技術在焊接鼻膽引流導管的應用特點






 工商網監
工商網監
評論