") AXI實(shí)戰(zhàn)(二)-AXI-Lite的Slave實(shí)現(xiàn)介紹
AXI實(shí)戰(zhàn)(二)-AXI-Lite的Slave實(shí)現(xiàn)介紹
概要-PG導(dǎo)讀
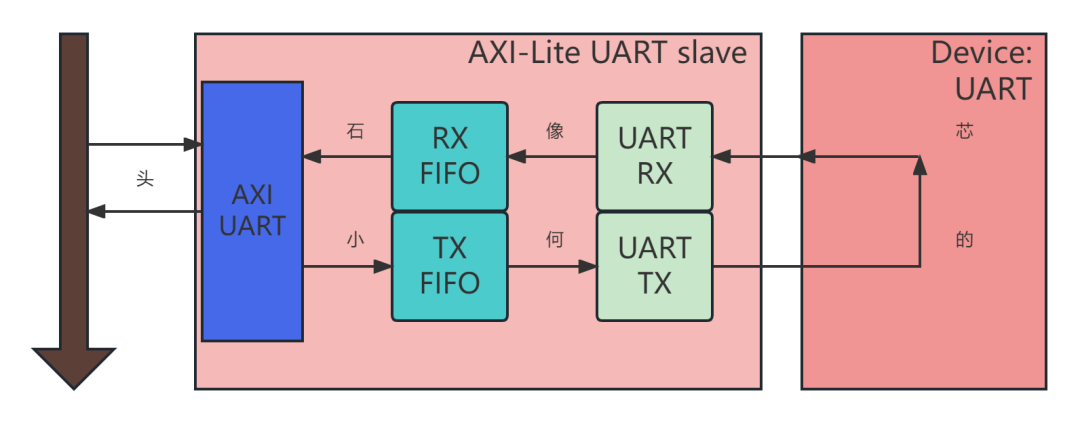
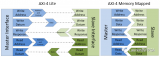
在PG142中,可以從 Overview中看到其實(shí)現(xiàn)的框圖:
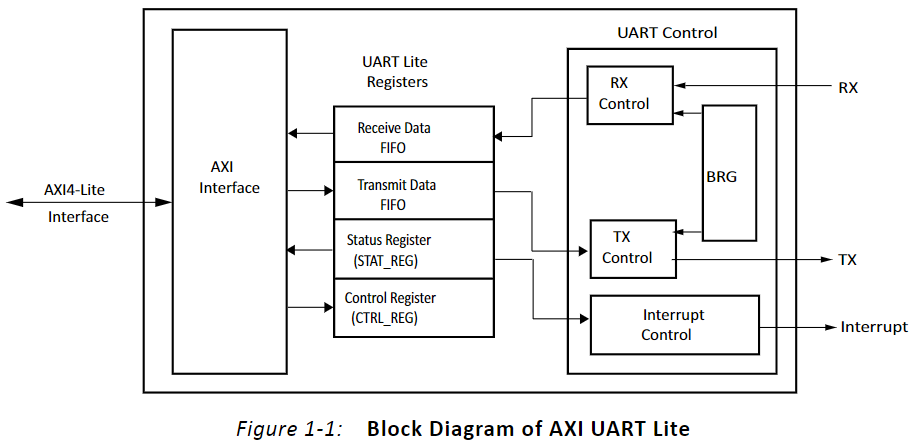
可以看到,在AXI到UART中,是通過(guò)寄存器和FIFO進(jìn)行中介的。因?yàn)閺腁XI總線往里看,其控制的是就是地址上所映射的寄存器。可以看到在這個(gè)IP中包含以下幾部分:
- AXI總線:實(shí)現(xiàn)總線握手和指定讀寫(xiě)操作
- UART Lite 寄存器:
- 狀態(tài)寄存器(STAT_REG)
- 控制寄存器(CTRL_REG)
- 接收數(shù)據(jù)FIFO(Receive Data FIFO)
- 發(fā)送數(shù)據(jù)FIFO(Transmit Data FIFO)
- 串口控制模塊:
- 發(fā)送控制
- 接收控制
- 中斷控制
所以本文所需要實(shí)現(xiàn)的東西也非常簡(jiǎn)單,主要包括一個(gè)能與FIFO交互的串口模塊,AXI的總線控制,以及一些寄存器的設(shè)置和終端控制就可以了。
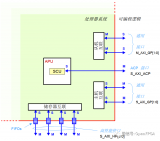
為了仿真期間可以更好地驗(yàn)證,所以我們還是可以加入一個(gè)串口回傳模塊進(jìn)行檢驗(yàn),所以所實(shí)現(xiàn)的框圖如下:
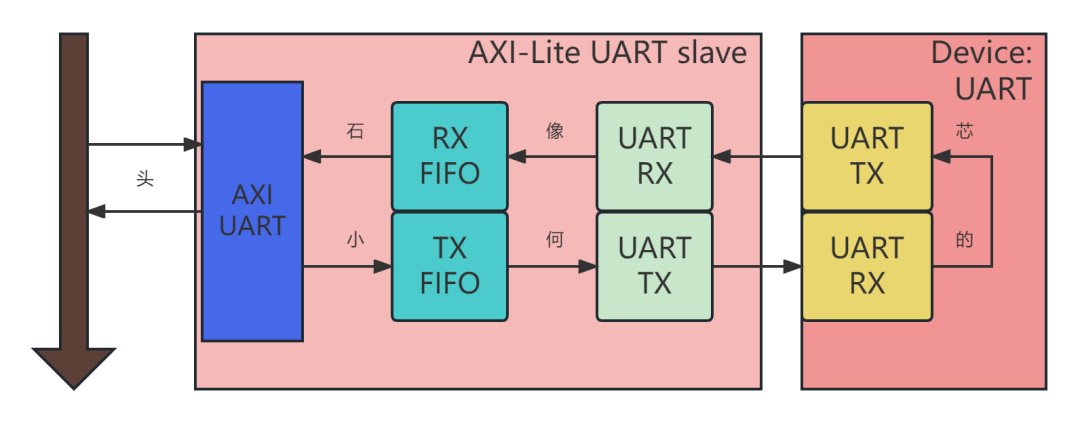
其中,Device在仿真的TB中加入。實(shí)際上也不需要加,直接將tx線連到rx就可以了。
然后通過(guò)IP框圖看看如何其頂層有什么可定義的功能:
IP框圖查看
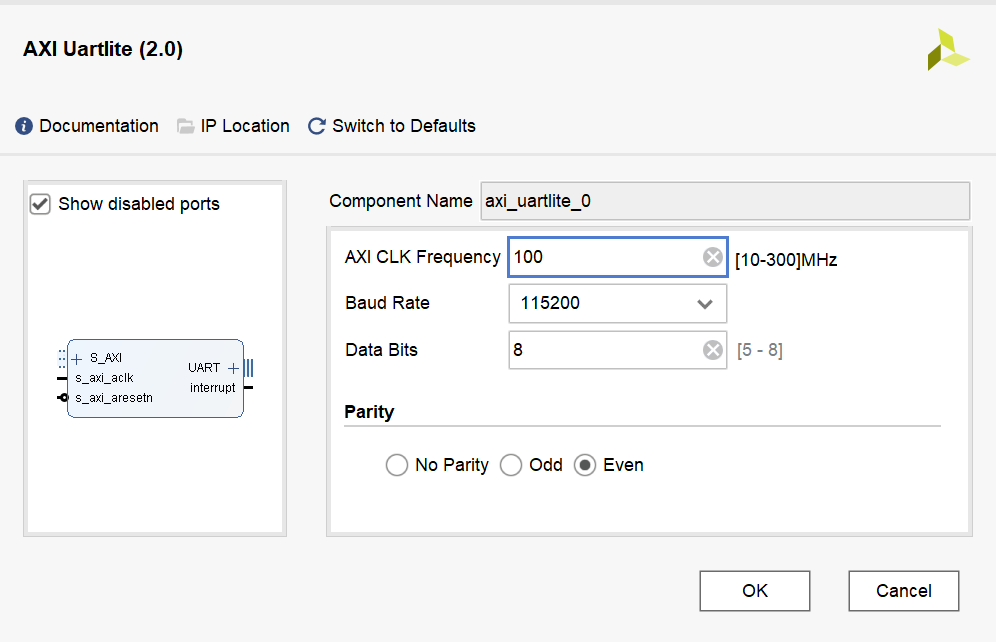
可以看到,在此IP中需要定義AXI總線的時(shí)鐘頻率,波特率,數(shù)據(jù)位以及奇偶檢驗(yàn)位。實(shí)現(xiàn)過(guò)串口的朋友應(yīng)該知道,這里需要定義AXI的時(shí)鐘和波特率顯然是為了確定波特率時(shí)鐘的計(jì)數(shù)值。而數(shù)據(jù)位與奇偶校驗(yàn)位是為了確定并串轉(zhuǎn)換以及最后滑動(dòng)寄存器長(zhǎng)度所需要。這些我們后面的代碼介紹都會(huì)講到。
需要注意的是,這里的AXI CLK Frequency是有上限的,詳見(jiàn)PG142-Ch2 Performance節(jié),有興趣的朋友也可以在實(shí)現(xiàn)完之后加點(diǎn)約束看看本文所實(shí)現(xiàn)的模塊能跑多快~
地址偏移
此處對(duì)應(yīng)PG142-CH2 Register Space節(jié)。這里需要為上面所說(shuō)到的配置寄存器,狀態(tài)寄存器和讀寫(xiě)FIFO安排地址。而在IP中設(shè)計(jì)的是相對(duì)地址:
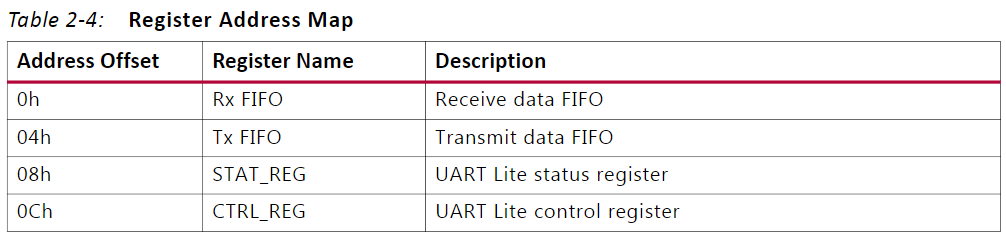
因?yàn)榭偩€位寬是32,AXI按字節(jié)序排地址,所以地址偏移每個(gè)寄存器+4。
讀FIFO
讀FIFO的寄存器定義為:
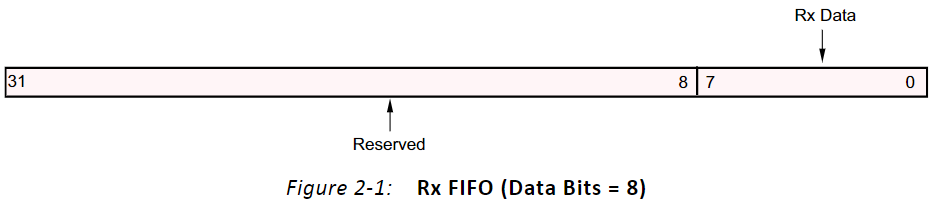
在IP中,讀FIFO默認(rèn)深度為16,當(dāng)Master對(duì)空的讀FIFO發(fā)起讀的時(shí)候需要返回總線錯(cuò)誤(SLVERR),而且Master對(duì)讀FIFO發(fā)起寫(xiě)事務(wù)將無(wú)效。其復(fù)位值為:

寫(xiě)FIFO
寫(xiě)FIFO的寄存器定義為:
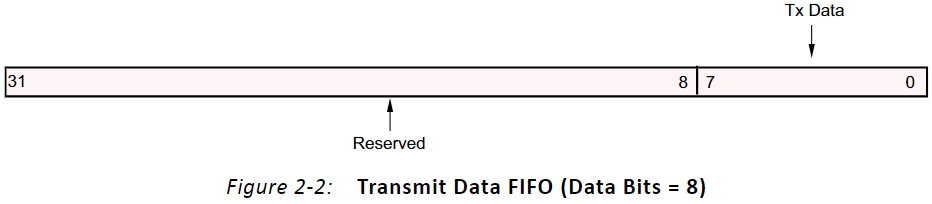
同樣的,寫(xiě)FIFO的默認(rèn)深度也是16.當(dāng)Master對(duì)滿(mǎn)的寫(xiě)FIFO寫(xiě)數(shù)據(jù)的時(shí)候需要返回總線錯(cuò)誤(SLVERR),而且Master對(duì)寫(xiě)FIFO發(fā)起讀事務(wù)將返回0。其復(fù)位值為:

控制寄存器 Control Register (CTRL_REG)
控制寄存器的定義為:
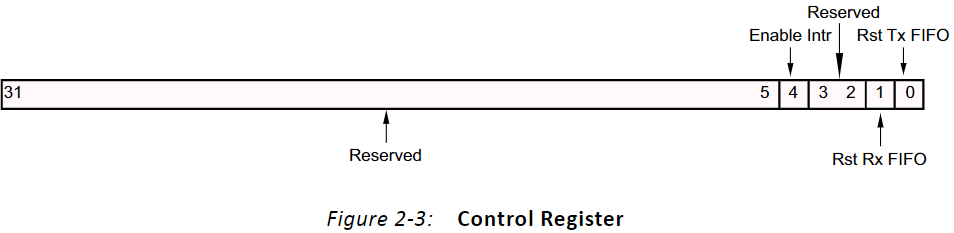
控制寄存器包含中斷使能位和讀FIFO和寫(xiě)FIFO的復(fù)位控制。這是一個(gè)只寫(xiě)寄存器。向控制寄存器發(fā)出讀請(qǐng)求會(huì)返回0。每一位的定義為:
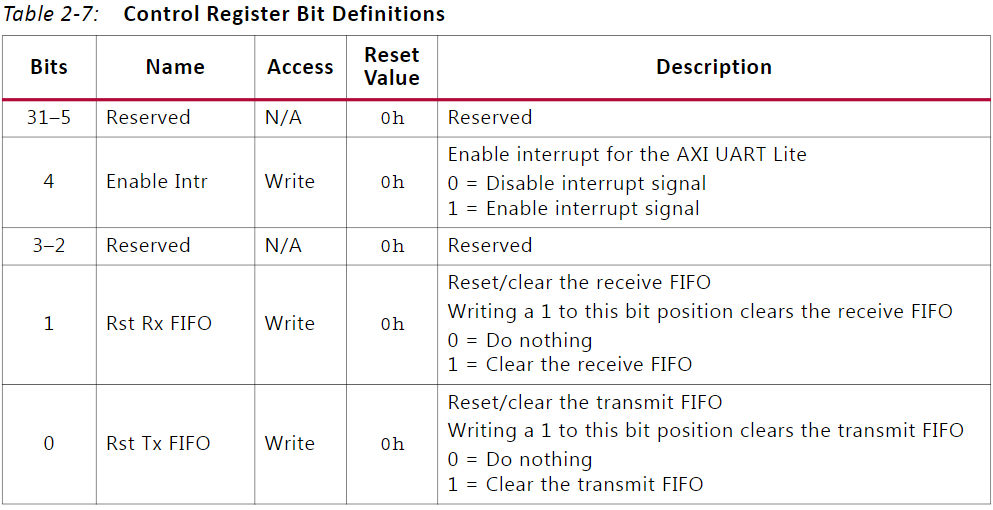
這里需要注意,中斷使能位復(fù)位值為0,所以后續(xù)的中斷處理我們需要先將中斷打開(kāi)。
狀態(tài)寄存器Status Register (STAT_REG)
狀態(tài)寄存器的定義為:
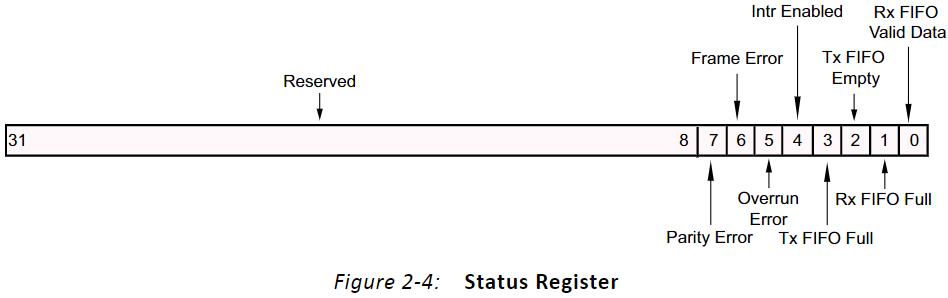
狀態(tài)寄存器中包含了讀寫(xiě)FIFO的空滿(mǎn)狀態(tài),中斷使能位與三個(gè)錯(cuò)誤位:
- Parity Error:奇偶校驗(yàn)錯(cuò)誤位,未指定時(shí)為常0
- Frame Error :幀錯(cuò)誤,停止位為0
- Overrun Error :過(guò)載錯(cuò)誤,收FIFO滿(mǎn)的情況下仍然接收到新的數(shù)據(jù)
錯(cuò)誤信息會(huì)一直保持到下一次讀狀態(tài)寄存器后歸0。需要注意的是,最后一位并不是讀FIFO的空信號(hào),而是其”非空“信號(hào)。
中斷控制
這是一直貫穿在前面的中斷線管理,其作用在文檔中沒(méi)有單獨(dú)列出。但可見(jiàn)于Overview中的 Interrupt Control :當(dāng)中斷被使能時(shí),讀FIFO的非空信號(hào)以及發(fā)FIFO的空信號(hào)將以上升沿的方式給出中斷。
串口模塊實(shí)現(xiàn)
這一部分了解串口模塊的RTL實(shí)現(xiàn)的朋友可以跳過(guò)。在這個(gè)模塊中將實(shí)現(xiàn)串口與FIFO之間的控制邏輯以及錯(cuò)誤信號(hào)的生成。
串口發(fā)送模塊
串口發(fā)送模塊中采用狀態(tài)機(jī)+波特率時(shí)鐘計(jì)數(shù)編寫(xiě)
波特率時(shí)鐘
首先根據(jù)系統(tǒng)時(shí)鐘和波特率計(jì)算出計(jì)算周期和定時(shí)器位寬,并定義出一個(gè)波特率周期和半波特率周期:
parameter CLK_FREQ = 100, // Mhz
parameter BAUD_RATE = 9600,
······
localparam Num_cycle = CLK_FREQ*1_000_000/BAUD_RATE; // Mhz
localparam CNT_DW = $clog2(Num_cycle);
reg [CNT_DW-1:0] cnt_baud;
wire Baud_A_period = (cnt_baud == Num_cycle-1);
wire Baud_Half_period = (cnt_baud == Num_cycle/2 -1);
然后根據(jù)計(jì)數(shù)值標(biāo)志位Baud_A_period可以寫(xiě)出計(jì)數(shù)器:
// baud cycle counter
always @(posedge clk_i or negedge rst_n_i) begin
if(!rst_n_i)
cnt_baud <= {CNT_DW{1'b0}};
else if(state!= next_state || Baud_A_period)
cnt_baud <= {CNT_DW{1'b0}};
else
cnt_baud <= cnt_baud + 1'b1;
end
最后因?yàn)殚_(kāi)始位和結(jié)束位的位寬都是1, 所以針對(duì)發(fā)送的數(shù)據(jù)需要做數(shù)據(jù)位寬個(gè)計(jì)數(shù)器cnt_bit,由于奇偶檢驗(yàn)位的存在,這里還需要計(jì)算數(shù)據(jù)位寬(這里奇偶檢驗(yàn)位定義與Xilinx保持一致):
parameter DW = 8,
parameter PARITY = 2'b10 // 00:no,2'b01:odd, 2'b10:even, 2'b11error
······
localparam Num_bit = DW + ^PARITY;
reg [3:0] cnt_bit;
wire Send_done = (cnt_bit == Num_bit -1);
always @(posedge clk_i or negedge rst_n_i) begin
if(!rst_n_i)
cnt_bit <= 4'b0;
else if(state == S_SEND) begin
if(Baud_A_period)
cnt_bit <= cnt_bit + 1'b1;
else
cnt_bit <= cnt_bit;
end
else
cnt_bit <= 4'b0;
end
發(fā)送狀態(tài)機(jī)
狀態(tài)機(jī)中包括:開(kāi)始位,發(fā)送,以及結(jié)束位
// FSM encoding
localparam S_IDLE = 2'b00;
localparam S_START = 2'b01; // start bit rec
localparam S_SEND = 2'b10; // data bits
localparam S_STOP = 2'b11; // stop bit
第一段,狀態(tài)轉(zhuǎn)移:
reg [1:0] state;
reg [1:0] next_state;
always @(posedge clk_i or negedge rst_n_i) begin
if(!rst_n_i)
state <= S_IDLE;
else
state <= next_state;
end
第二段,狀態(tài)轉(zhuǎn)移條件:
wire Send_done = (cnt_bit == Num_bit -1);
always @(*) begin
case (state)
S_IDLE :
next_state = (!tx_fifo_empty) ? S_START : S_IDLE;
S_START :
next_state = Baud_A_period ? S_SEND : S_START;
S_SEND :
next_state = (Baud_A_period && Send_done) ? S_STOP : S_SEND;
S_STOP :
next_state = Baud_A_period ? S_IDLE : S_STOP;
default:
next_state = S_IDLE;
endcase
end
第三段,狀態(tài)輸出:
reg tx_reg;
always @(posedge clk_i or negedge rst_n_i) begin
if(!rst_n_i)
tx_reg <= 1'b1;
else
case(state)
S_IDLE,S_STOP:
tx_reg <= 1'b1;
S_START:
tx_reg <= 1'b0;
S_SEND:
tx_reg <= _send_data[cnt_bit];
default:
tx_reg <= 1'b1;
endcase
輸出數(shù)據(jù)準(zhǔn)備
首先是計(jì)算奇偶檢驗(yàn)位(如果存在的話):
reg parity_cal;
always @(posedge clk_i) begin
if(!rst_n_i)
parity_cal <= 1'b0;
else if(state==S_START)
case (PARITY)
2'b00,2'b11:parity_cal <= 1'b0;
2'b01:
parity_cal <= ^tx_fifo_do ? 1'b0 : 1'b1;
2'b10:
parity_cal <= ^tx_fifo_do ? 1'b1 : 1'b0;
endcase
else
parity_cal <= parity_cal;
end
然后準(zhǔn)備發(fā)送的數(shù)據(jù),這里由于為了圖方便,FIFO用了FWFT,所以時(shí)序?qū)R比較簡(jiǎn)單,這里會(huì)根據(jù)奇偶檢驗(yàn)位動(dòng)態(tài)生成:
reg [Num_bit-1:0] _send_data;
wire [Num_bit-1:0] _send_data_t;
generate
if(^PARITY == 1'b1)
assign _send_data_t = {parity_cal, tx_fifo_do};
else
assign _send_data_t = tx_fifo_do;
endgenerate
always @(posedge clk_i) begin
if(!rst_n_i)
_send_data < = {Num_bit{1'b0}};
else if(state == S_START)
_send_data <= _send_data_t;
else
_send_data <= _send_data;
end
這里的數(shù)據(jù)線序需要理一下,因?yàn)榘l(fā)送按tx_reg <= _send_data[cn\\t_bit];輸出,所以_send_data的最高位是奇偶校驗(yàn)位最晚輸出。
串口接收模塊
這里與發(fā)送模塊十分近似,僅列出錯(cuò)誤計(jì)算部分:
奇偶檢驗(yàn)出錯(cuò)
這里只需要采用連異或就可以了:
// parity_err check
reg parity_err_cal;
always @(*) begin
if(state==S_STOP&&Baud_Half_period)
case (PARITY)
2'b01: // odd
parity_err_cal = (^_rec_data == 1'b1) ? 1'b0:1'b1; // '1' occur odd - > right
2'b10: // even
parity_err_cal = (^_rec_data == 1'b0) ? 1'b0:1'b1; // '1' occur even - > right
default:
parity_err_cal = 1'b0;
endcase
else
parity_err_cal = 1'b0;
end
reg parity_err; // output
always @(posedge clk_i) begin
if(!rst_n_i)
parity_err <= 1'b0;
else
parity_err <= parity_err_cal;
end
停止位為0錯(cuò)誤
對(duì)應(yīng)頂層的Frame error,判斷也非常簡(jiǎn)單:
// - > parity_err
always @(posedge clk_i) begin
if(!rst_n_i)
parity_err <= 1'b0;
else
parity_err <= parity_err_cal;
end
reg stop_0_err; // output
always @(posedge clk_i) begin
if(!rst_n_i)
stop_0_err <= 1'b0;
else
stop_0_err <= stop_0_err_cal;
end
至于overrun error直接判斷讀FIFO就好了,在寫(xiě)讀FIFO的同時(shí)讀FIFO為滿(mǎn)即為overrun。
控制寄存器,狀態(tài)寄存器與中斷的實(shí)現(xiàn)
在完成串口模塊后,此時(shí)引入AXI中的寄存器定義,完成對(duì)FIFO的控制和狀態(tài)回傳。
對(duì)讀寫(xiě)不同的寄存器,在這里引進(jìn)了一個(gè)refresh信號(hào)指示當(dāng)前什么寄存器被讀或?qū)懥耍校?/p>
input [1:0] refresh, //refresh = {stat_refresh, ctrl_refresh}
控制寄存器
重看其定義如下:
配置寄存器非常簡(jiǎn)單,只需要配合refresh進(jìn)行使能中斷和FIFO復(fù)位即可,如:
always @(posedge clk_i or negedge rst_n_i) begin
if(!rst_n_i)
tx_fifo_rst <= 1'b0;
else if(refresh[0])
tx_fifo_rst <= ctrl_reg[0];
else
tx_fifo_rst <= 1'b0;
end
狀態(tài)寄存器
重看其定義如下:
頭三個(gè)是錯(cuò)誤位,后面指示的是FIFO的空滿(mǎn)狀態(tài),由于錯(cuò)誤狀態(tài)一旦被讀就會(huì)刷新,則可以定義:
reg [7:0] _stat_r;
reg [7:0] _stat_w;
wire [2:0] _err_r = {parity_err,stop_0_err, rx_fifo_wr&&rx_fifo_full};
always @(*) begin
if(refresh[1])
_stat_w = {3'b0, interrupt_en,
tx_fifo_full, tx_fifo_empty,rx_fifo_full,~rx_fifo_empty};
else
_stat_w = {_err_r|_stat_r[7-:3], interrupt_en,
tx_fifo_full, tx_fifo_empty,rx_fifo_full,~rx_fifo_empty};
end
always @(posedge clk_i or negedge rst_n_i) begin
if(!rst_n_i)
_stat_r <= 8'b0000_0100;
else
_stat_r <= _stat_w;
end
assign stat_reg = {24'd0, _stat_r};
中斷的實(shí)現(xiàn)
在中斷的設(shè)計(jì)中,需要在讀FIFO的非空信號(hào)以及發(fā)FIFO的空信號(hào)將以上升沿的方式給出中斷,所以控制為:
reg _uart_interrupt;
always @(posedge clk_i or negedge rst_n_i) begin
if(!rst_n_i)
_uart_interrupt <= 1'b0;
else if(interrupt_en && ~_uart_interrupt ) begin
if(tx_fifo_empty| ~rx_fifo_empty)
_uart_interrupt <= 1'b1;
else
_uart_interrupt <= 1'b0;
end
else
_uart_interrupt <= 1'b0;
end
AXI-Lite總線的實(shí)現(xiàn)
在經(jīng)過(guò)以上的抽象后,我們僅需在AXI-Lite上放出這兩個(gè)寄存器和兩個(gè)FIFO就可以了,同時(shí)注意有部分特殊情況需要返回總線錯(cuò)誤。為了方便銜接,在本文中絕大多數(shù)實(shí)現(xiàn)方式與Xilinx實(shí)現(xiàn)方式是一致的,也方便后續(xù)在提到優(yōu)化的時(shí)候來(lái)指出Xilinx的代碼問(wèn)題。
定義地址偏移量
這里的定義在后續(xù)的文章中可能會(huì)不一樣,但是整體是一致的:
localparam ADDRLSB = $clog2(C_AXI_DATA_WIDTH/8); // 字節(jié)序再取log - > 偏移位寬
// address mapping
localparam [C_AXI_ADDR_WIDTH-1 -ADDRLSB:0] UART_RX_FIFO = 'd0,
UART_TX_FIFO = 'd1,
UART_STA_REG = 'd2,
UART_CTR_REG = 'd3;
reg [C_AXI_ADDR_WIDTH-1 -ADDRLSB:0] axi_awaddr;
reg [C_AXI_ADDR_WIDTH-1 -ADDRLSB:0] axi_araddr;
需要注意這里的地址定義的是0->1->2->3 是經(jīng)過(guò)ADDRLSB的計(jì)算移位的,在32位的情況下,ADDRLSB=2,所以當(dāng)0123左移四位便得到了048C。
By the way, 這個(gè)ADDRLSB的寫(xiě)法糾正了Xilinx之前的求法:
localparam integer ADDR_LSB = (C_S_AXI_DATA_WIDTH/32)+1;
Xilinx的這種寫(xiě)法在位寬大于32的時(shí)候是跟上面的寫(xiě)法對(duì)等的,但是顯然上面的寫(xiě)法更加適合理解并適用于低位寬的AXI總線。
AddrWrite(AW)通道
此處除了寫(xiě)入地址外,基本就是Xilinx的示例代碼
// --------------------------- AW channel -----------------------------------
reg aw_en;
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 ) begin
axi_awready <= 1'b0; // 協(xié)議ready
aw_en <= 1'b1; // 模塊ready
end
else begin
if (~axi_awready && S_AXI_AWVALID && S_AXI_WVALID && aw_en) begin
axi_awready <= 1'b1;
aw_en <= 1'b0;
end
else if (S_AXI_BREADY && axi_bvalid) begin // 寫(xiě)回應(yīng)結(jié)束,模塊內(nèi)恢復(fù)ready
axi_awready <= 1'b0;
aw_en <= 1'b1;
end
else begin
axi_awready <= 1'b0;
end
end
end
// latch aw addr
always @( posedge S_AXI_ACLK )begin
if ( S_AXI_ARESETN == 1'b0 )begin
axi_awaddr <= 2'b00;
end
else begin
if (~axi_awready && S_AXI_AWVALID && S_AXI_WVALID && aw_en) begin
// Write Address latching
axi_awaddr <= S_AXI_AWADDR[C_AXI_ADDR_WIDTH-1: ADDRLSB];
end
end
end
這個(gè)axi_awaddr就是前面所說(shuō)過(guò)的偏移量,直接截掉低兩位后048C將變?yōu)?123。
Write(W)通道
在寫(xiě)通道中,不像是例程中簡(jiǎn)單,需要根據(jù)不同地址進(jìn)行數(shù)據(jù)寫(xiě)入。在這個(gè)IP中,只有寫(xiě)FIFO和控制寄存器被允許寫(xiě)入。這里的數(shù)據(jù)寫(xiě)入判斷和Xilinx例程也是類(lèi)似的,但是會(huì)精簡(jiǎn)了S_AXI_WSTRB的判斷,因?yàn)槲覀兊募拇嫫鞫贾挥械桶宋皇怯行У?
首先是握手:
always @( posedge S_AXI_ACLK ) begin
if ( S_AXI_ARESETN == 1'b0 )
axi_wready <= 1'b0;
else if (~axi_wready && S_AXI_WVALID && S_AXI_AWVALID && aw_en )
axi_wready <= 1'b1;
else
axi_wready <= 1'b0;
end
然后是根據(jù)地址判斷寫(xiě)入的信息,第一個(gè)是寫(xiě)FIFO:
reg _tx_fifo_wr;
reg [31:0] _tx_fifo_di;
always @( posedge S_AXI_ACLK ) begin
if ( S_AXI_ARESETN == 1'b0 ) begin
_tx_fifo_di <= 32'd0;
_tx_fifo_wr <= 1'b0;
end
else if (axi_wready && axi_awaddr==UART_TX_FIFO &&
S_AXI_AWVALID && (S_AXI_WSTRB[0] == 1'b1)) begin
_tx_fifo_wr <= ~tx_fifo_full;
_tx_fifo_di <= S_AXI_WDATA;
end
else begin
_tx_fifo_wr <= 1'b0;
_tx_fifo_di <= _tx_fifo_di;
end
end
最后是控制寄存器
reg [31:0] _ctrl_reg;
always @( posedge S_AXI_ACLK ) begin
if ( S_AXI_ARESETN == 1'b0 ) begin
_ctrl_reg <= 32'd0;
ctrl_refresh <= 1'b0;
end
else if (axi_wready && axi_awaddr==UART_CTR_REG &&
S_AXI_AWVALID && (S_AXI_WSTRB[0] == 1'b1)) begin
_ctrl_reg <= S_AXI_WDATA;
ctrl_refresh <= 1'b1;
end
else begin
ctrl_refresh <= 1'b0;
_ctrl_reg <= _ctrl_reg;
end
end
這里會(huì)同步有一個(gè)使能信號(hào),如上文所述,到后面assign到refresh里面去了。
寫(xiě)響應(yīng)(B)通道
這里需要注意,當(dāng)手冊(cè)上寫(xiě)到,當(dāng)Master往滿(mǎn)的FIFO寫(xiě)數(shù)據(jù)時(shí),需要報(bào)總線錯(cuò)誤RESP_SLVERR,所以有:
// --------------------------- B channel -----------------------------------
always @( posedge S_AXI_ACLK ) begin
if ( S_AXI_ARESETN == 1'b0 ) begin
axi_bvalid <= 0;
axi_bresp <= 0;
end
else begin
if (axi_awready && S_AXI_AWVALID && ~axi_bvalid
&& axi_wready && S_AXI_WVALID) begin
axi_bvalid <= 1'b1;
axi_bresp <= (axi_awaddr==UART_TX_FIFO && tx_fifo_full) ? 2'b10 : 2'b00;
end
else if (axi_bvalid && S_AXI_BREADY) begin
// Read data is accepted by the master
axi_bvalid <= 1'b0;
end
end
end
AddrRead(AR)通道
在AR通道上和AW是一樣的
// --------------------------- AR channel -----------------------------------
always @( posedge S_AXI_ACLK ) begin
if ( S_AXI_ARESETN == 1'b0 ) begin
axi_arready <= 1'b0;
axi_araddr <= 2'b0;
end
else begin
if (~axi_arready && S_AXI_ARVALID) begin
// indicates that the slave has acceped the valid read address
axi_arready <= 1'b1;
// Read address latching
axi_araddr <= S_AXI_ARADDR[C_AXI_ADDR_WIDTH-1: ADDRLSB];
end
else begin
axi_arready <= 1'b0;
end
end
end
Read(R)通道
現(xiàn)在到了這個(gè)設(shè)計(jì)最難的一步了,就是假設(shè)我們的讀FIFO并不是一個(gè)FWFT的FIFO,那么其讀延遲會(huì)有兩個(gè)時(shí)鐘周期的延遲,所以這個(gè)時(shí)候需要先不拉高rvalid。所以這里小何的辦法是當(dāng)其讀FIFO的時(shí)候寄存讀使能,當(dāng)兩拍后檢測(cè)到其下降沿時(shí)再拉高rvalid,代碼如下:
// --------------------------- R channel -----------------------------------
reg _rx_fifo_rd,_rx_fifo_rd0,_rx_fifo_rd1;
always @( posedge S_AXI_ACLK ) begin
if ( S_AXI_ARESETN == 1'b0 ) begin
axi_rvalid <= 0;
axi_rresp <= 0;
_rx_fifo_rd <= 1'b0;
stat_refresh <= 1'b0;
end
else begin
stat_refresh <= 1'b0;
_rx_fifo_rd <= 1'b0;
if (axi_arready && S_AXI_ARVALID && ~axi_rvalid) begin
// Valid read data is available at the read data bus
axi_rvalid <= 1'b1;
if(axi_araddr==UART_RX_FIFO && ~rx_fifo_empty) begin // 2 clock latency
axi_rvalid <= 1'b0;
_rx_fifo_rd <=1'b1;
end
else if(axi_araddr==UART_STA_REG) // read register
stat_refresh <= 1'b1;
//When a read request to empty FIFO, a bus error (SLVERR) is generated
axi_rresp <= (axi_araddr==UART_RX_FIFO && rx_fifo_empty) ? 2'b10 : 2'b00;
end
else if({_rx_fifo_rd1,_rx_fifo_rd0} == 2'b10)
axi_rvalid <= 1'b1;
else if (axi_rvalid && S_AXI_RREADY)
// Read data is accepted by the master
axi_rvalid <= 1'b0;
else begin
axi_rvalid <=axi_rvalid;
axi_rresp <= axi_rresp;
end
end
end
這里利用了axi_arready握手完就會(huì)拉低的邏輯,然后時(shí)讀使能的寄存:
always @( posedge S_AXI_ACLK ) begin
if ( S_AXI_ARESETN == 1'b0 )
{_rx_fifo_rd0,_rx_fifo_rd1} <= 2'b00;
else
{_rx_fifo_rd1,_rx_fifo_rd0} <= {_rx_fifo_rd0,_rx_fifo_rd};
end
最后是選擇數(shù)據(jù):
always @( posedge S_AXI_ACLK ) begin
if (!S_AXI_RVALID || S_AXI_RREADY) begin
casez (axi_araddr)
UART_RX_FIFO: axi_rdata <= rx_fifo_do;
UART_TX_FIFO: axi_rdata <= 32'd0;
UART_STA_REG: axi_rdata <= stat_reg;
UART_CTR_REG: axi_rdata <= 32'd0;
endcase
end
end
至此,AXI-Lite轉(zhuǎn)UART的全過(guò)程就設(shè)計(jì)完畢了~
仿真
在仿真章節(jié)中用到了上一小節(jié)中所介紹的"完美"主機(jī),未知的朋友可以回看上一節(jié)的介紹,要是不管實(shí)現(xiàn)的話其實(shí)非常容易使用。如以下的使用步驟:
時(shí)鐘和復(fù)位
和一般TB寫(xiě)法一致,此處略過(guò)
DUT例化連線,增加回環(huán)設(shè)備
在這里需要把我們?cè)O(shè)計(jì)的模塊連進(jìn)interface,并且將串口模塊做一個(gè)簡(jiǎn)單的回傳:
也就是說(shuō),這里我們并不需要實(shí)現(xiàn)Device,直接把用線回傳就可以了
如上一節(jié)講的一樣,這里我們直接連線:
module tb_axi_lite_uart #(
parameter DW = 8,
parameter CLK_FREQ = 100,
parameter BAUD_RATE = 115200,
parameter PARITY = 2'b10, // 00 - > no parity - > 2'b01:odd - > 2'b10:even - > 2'b11error
......
Axil_uart_top #(
.C_AXI_ADDR_WIDTH(C_AXI_ADDR_WIDTH ),
.C_AXI_DATA_WIDTH(C_AXI_DATA_WIDTH ),
.DW(DW ),
.CLK_FREQ(CLK_FREQ ),
.BAUD_RATE(BAUD_RATE ),.PARITY ( PARITY ))
Axil_uart_top_dut (
.S_AXI_ACLK (clk ),
.S_AXI_ARESETN (rst_n ),
.S_AXI_AWVALID (master.aw_valid ),
.S_AXI_AWREADY (master.aw_ready ),
.S_AXI_AWADDR (master.aw_addr ),
.S_AXI_AWPROT (master.aw_prot ),
.S_AXI_WVALID (master.w_valid ),
.S_AXI_WREADY (master.w_ready),
.S_AXI_WDATA (master.w_data ),
.S_AXI_WSTRB (master.w_strb ),
.S_AXI_BVALID (master.b_valid ),
.S_AXI_BREADY (master.b_ready ),
.S_AXI_BRESP (master.b_resp ),
.S_AXI_ARVALID (master.ar_valid ),
.S_AXI_ARREADY (master.ar_ready ),
.S_AXI_ARADDR (master.ar_addr ),
.S_AXI_ARPROT (master.ar_prot ),
.S_AXI_RVALID (master.r_valid),
.S_AXI_RREADY (master.r_ready ),
.S_AXI_RDATA ( master.r_data ),
.S_AXI_RRESP (master.r_resp ),
.uart_rx_phy (uart_tx_phy ),
.uart_tx_phy (uart_tx_phy ),
.uart_interrupt(uart_interrupt)
);
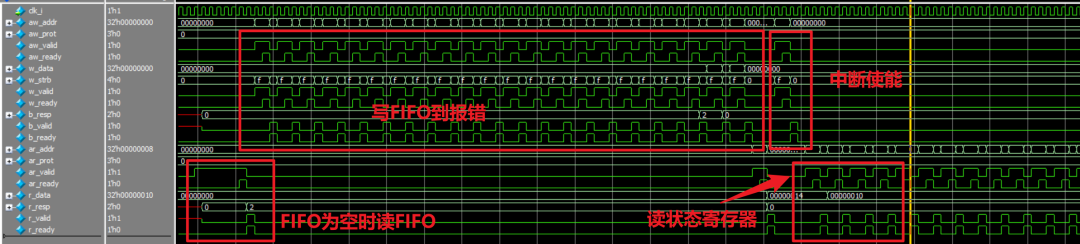
測(cè)試總線錯(cuò)誤
根據(jù)Spec要求,需要在發(fā)FIFO滿(mǎn)的時(shí)候再發(fā)送數(shù)據(jù)和當(dāng)讀FIFO為空時(shí)需要返回總線錯(cuò)誤RESP_SLVERR,所以我們會(huì)有一下測(cè)試方法:
// testing RESP_SLVERR
lite_axi_master.read(axi_addr_t'(32'h0000_0000), axi_pkg::prot_t'('0), stat_data, resp);
assert (resp == axi_pkg::RESP_SLVERR) else $fatal(1, "Fail to assert RESP_SLVERR");
$display("%0t > RESP_SLVERR Received stat reg : %h RESP: %h", $time(), stat_data, resp);
while(wrong_resp == axi_pkg::RESP_OKAY)
lite_axi_master.write(axi_addr_t'(32'h0000_0004), axi_pkg::prot_t'('0),
axi_data_t'(0), axi_strb_t'(4'hF), wrong_resp);
$display("%0t > RESP_SLVERR Send FIFO : FULL RESP: %h", $time(),wrong_resp);
lite_axi_master.write(axi_addr_t'(32'h0000_000C), axi_pkg::prot_t'('0),
axi_data_t'(32'h0000_0003), axi_strb_t'(4'hF), resp);
assert (resp == axi_pkg::RESP_OKAY) else $fatal(1, "Fail to Reset ALL FIFO");
$display("%0t > Reset ALL FIFO RESP: %h", $time(),resp);
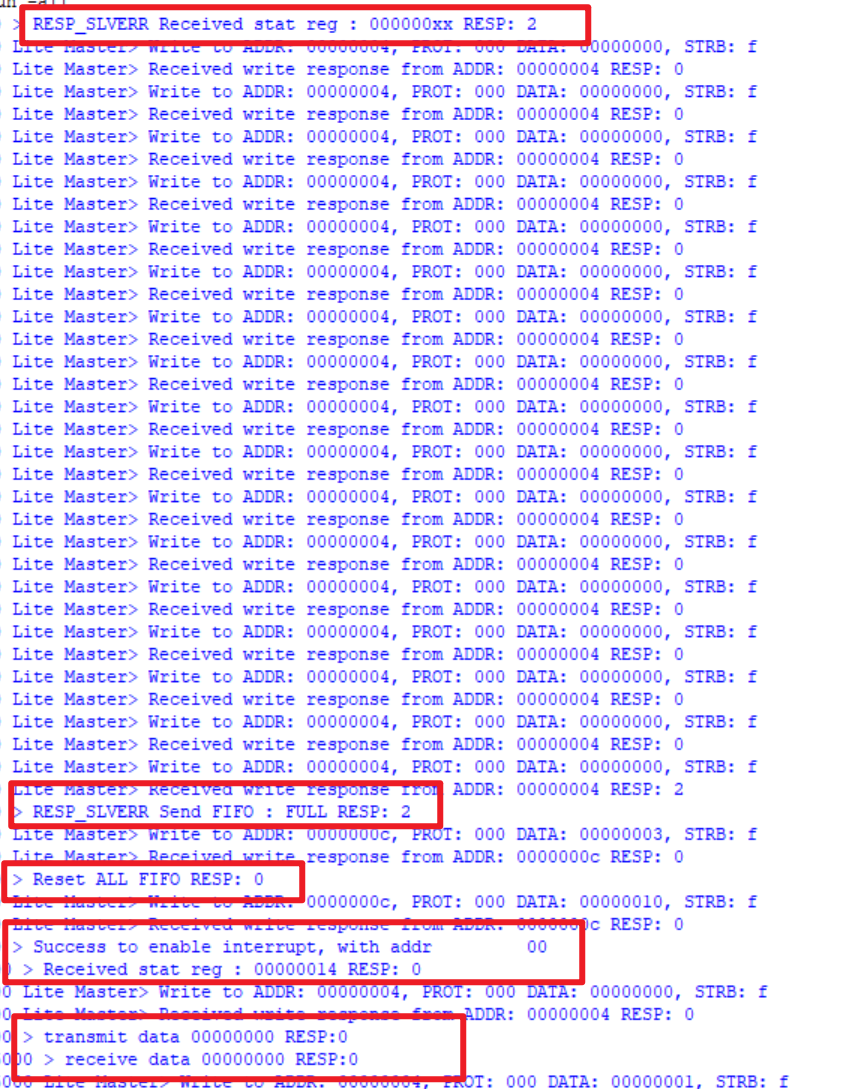
仿真后提示為:
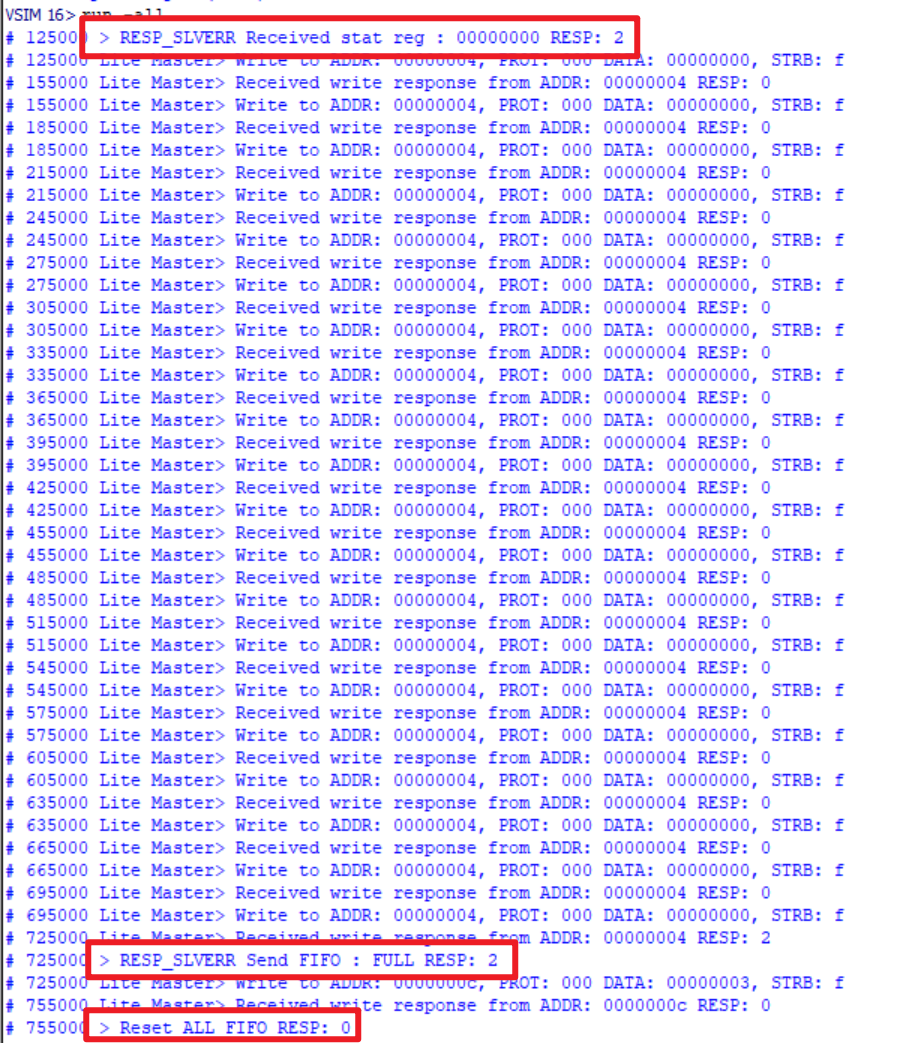
可以看到成功觸發(fā)了錯(cuò)誤。
測(cè)試讀寫(xiě)功能
首先第一步是打開(kāi)中斷:
// Write to config register - > enable interrupt
lite_axi_master.write(axi_addr_t'(32'h0000_000C), axi_pkg::prot_t'('0),
axi_data_t'(32'h0000_0010), axi_strb_t'(4'hF), resp);
assert (resp == axi_pkg::RESP_OKAY) else $fatal(1, "Fail to enable interrupt");
$display("%0t > Success to enable interrupt, with addr", $time(), data, resp);
lite_axi_master.read(axi_addr_t'(32'h0000_0008), axi_pkg::prot_t'('0), stat_data, resp);
$display("%0t > Received stat reg : %h RESP: %h", $time(), stat_data, resp);
此時(shí)我們可以監(jiān)聽(tīng)中斷信號(hào),然后去讀狀態(tài)寄存器,發(fā)現(xiàn)讀FIFO非空就可以讀數(shù)據(jù)出來(lái)了,所以會(huì)一直讀狀態(tài)寄存器。小何在這里把Lite Master的讀display給注釋掉了,代碼如下:
for(int i=0;i< 40;i++) begin
lite_axi_master.write(axi_addr_t'(32'h0000_0004), axi_pkg::prot_t'('0),
axi_data_t'(i), axi_strb_t'(4'hF), resp);
// axi_data_t'(32'h0000_0052), axi_strb_t'(4'hF), resp);
assert (resp == axi_pkg::RESP_OKAY) else $fatal(1, "Fail to send data");
$display("%0t > transmit data %h RESP:%h ", $time(), i, resp);
// Read from it.
@(posedge uart_interrupt);
lite_axi_master.read(axi_addr_t'(32'h0000_0008),
axi_pkg::prot_t'('0), stat_data, resp);
assert (resp == axi_pkg::RESP_OKAY) else $fatal(1, "Fail to recv stat_data.");
while(stat_data[0]!=1'b1) begin
lite_axi_master.read(axi_addr_t'(32'h0000_0008),
axi_pkg::prot_t'('0), stat_data, resp);
// $display("%0t > Received stat reg : %h RESP: %h", $time(), stat_data, resp);
end
lite_axi_master.read(axi_addr_t'(32'h0000_0000), axi_pkg::prot_t'('0), data, resp);
assert (resp == axi_pkg::RESP_OKAY) else $fatal(1, "Fail to recv data.");
// Checking of the expecetd read data is handled in `proc_check_read_data`.
$display("%0t > receive data %h RESP:%h ", $time(), data, resp);
end
然后看一下display
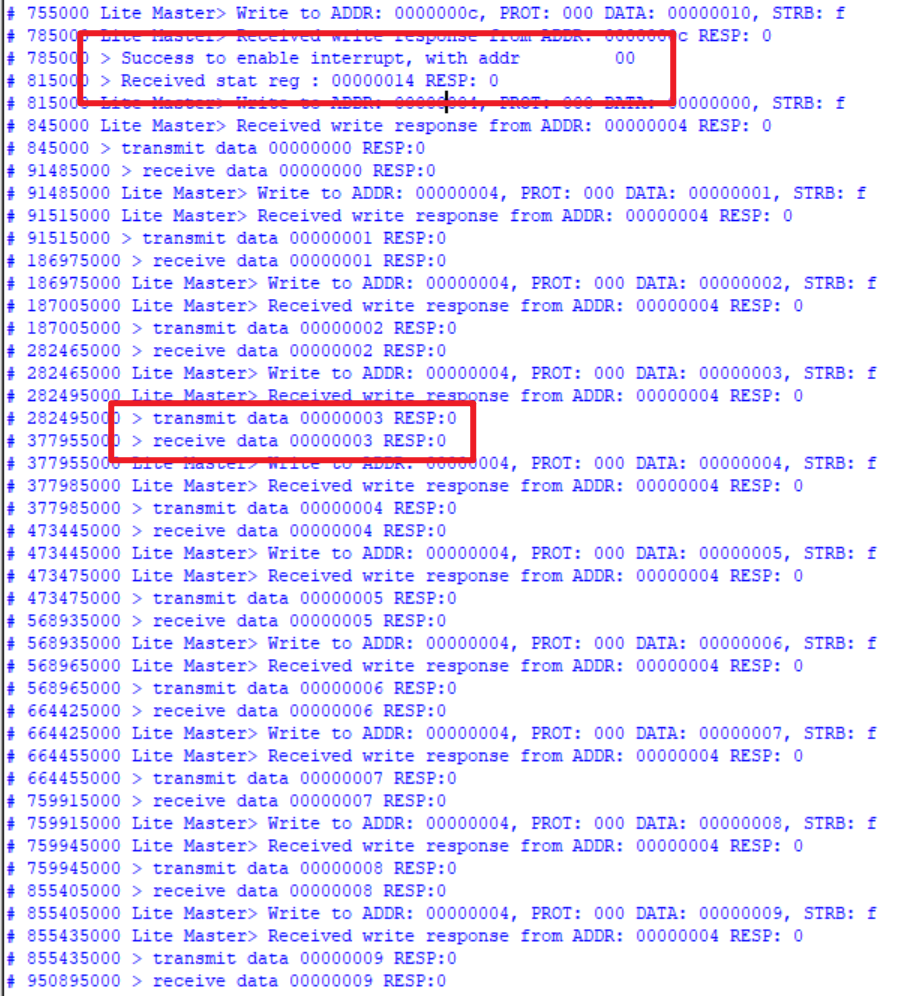
數(shù)據(jù)也沒(méi)有什么大問(wèn)題
查看波形
作為老仿真人,還是從波形來(lái)看看AXI的握手情況:
SystemVerilog下的仿真掉波形非常簡(jiǎn)單,只要點(diǎn)interface類(lèi)型,然后直接ctrl+W就可以了:
仿真IP
對(duì)相同的IP,在這里我們也做一次一樣的仿真,防止仿真平臺(tái)自己出錯(cuò):
得到了相同的效果,此時(shí)查看波形:
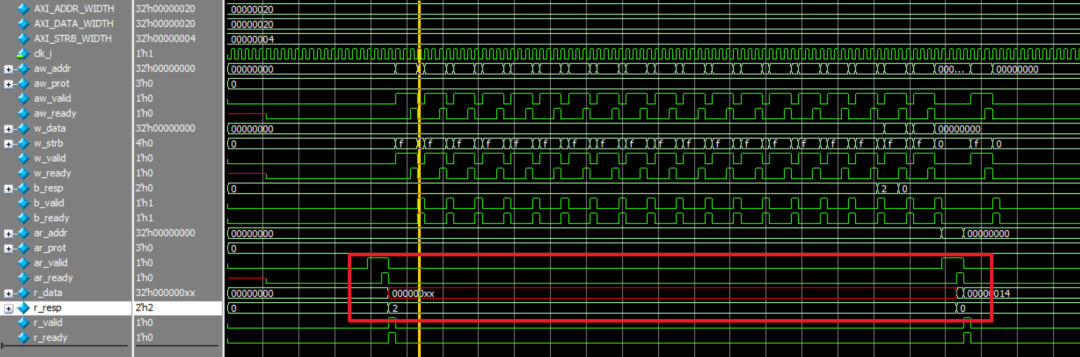
可以看到讀通道有一段是未知態(tài),但是其中沒(méi)有握手就沒(méi)事情了。大體的握手波形是一致的。
-
定時(shí)器
+關(guān)注
關(guān)注
23文章
3254瀏覽量
115074 -
AXI總線
+關(guān)注
關(guān)注
0文章
66瀏覽量
14291 -
FIFO存儲(chǔ)
+關(guān)注
關(guān)注
0文章
103瀏覽量
6020 -
UART接口
+關(guān)注
關(guān)注
0文章
124瀏覽量
15318 -
狀態(tài)寄存器
+關(guān)注
關(guān)注
0文章
39瀏覽量
7113
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Zynq中AXI4-Lite和AXI-Stream功能介紹

XADC和AXI4Lite接口:定制AXI引腳
有沒(méi)有一種標(biāo)準(zhǔn)的方式到達(dá)PL AXI-Lite總線?
AXI_Lite總線使用方法
AMBA 4 AXI4、AXI4-Lite和AXI4-流協(xié)議斷言用戶(hù)指南
AXI-4 Lite接口協(xié)議仿真波形解析
一文詳解ZYNQ中的DMA與AXI4總線
FPGA程序設(shè)計(jì):如何封裝AXI_SLAVE接口IP
PCIE通信技術(shù):通過(guò)AXI-Lite ip配置的VDMA使用
ZYNQ中DMA與AXI4總線
AXI 總線交互分為 Master / Slave 兩端
AXI4 、 AXI4-Lite 、AXI4-Stream接口
自定義AXI-Lite接口的IP及源碼分析
AXI傳輸數(shù)據(jù)的過(guò)程





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論