 您的公差范圍有多寬?
您的公差范圍有多寬?
清理三號過道,清理三號過道。轉過三號過道的拐角,您將面對一個機器人來回踱步(有點),以防止購物者踏入或踩在溢出的物品上。當你接近時,機器人會在撞到你之前停下來。我們知道這是由于傳感器造成的,但他們究竟如何計算機器人的停止范圍?
本博客的靈感不是來自超市旅行,而是閱讀了IEC 61496-4-3附錄BB的草案。IEC 61496-4-3 是用于人體存在檢測的立體傳感器標準。該標準討論了測量所需的可重復性。該主題也在涵蓋 61496D TOF 和 IEC 3 的相關標準 IEC 3-62988 中進行了描述,這些標準討論了 IEC 61496 系列范圍內未包含的類似傳感器。
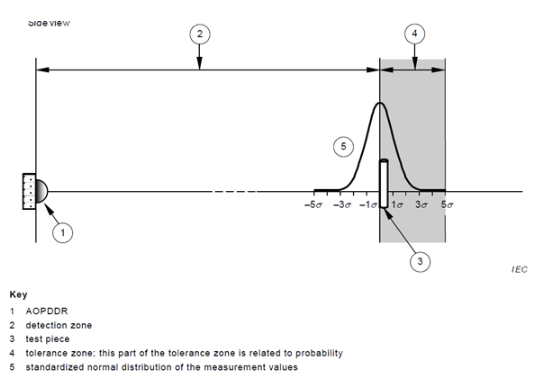
圖 1:圖片來自 IEC 61496-3 附錄 BB
讓我們從機器人安全的一些背景開始。在機器人前面會有一個檢測區域,用于識別何時有人接近機器人,然后在人到達危險之前停止機器人。查看上圖,您會看到必須在檢測區域中添加一個公差區,以確保即使在存在噪聲的情況下,在距離測量中發現的可變性的情況下,檢測到某人的概率也足夠高。這意味著,如果您的安全計算表明您應該在距離機器人 1 米處檢測到某人,以便保證在機器人到達危險之前停止機器人,您可能需要將行程點設置為 1.05、1.1 或 1.105 米,具體取決于距離測量的可重復性。但是我們如何確定該公差區的寬度呢?
讓我們來看看重復性測量背后的數學原理。如果您測量任何模擬量,例如距離,電壓,電流,功率,溫度1,000次,則可能不會每次都得到完全相同的值,除非您的傳感器分辨率與噪聲相比真的很差。更有可能的是,您將獲得一組通常使用正態分布來表征的測量值。這意味著測量值以平均值和分布測量值為特征,該測量值由上圖中鐘形曲線所示的標準偏差給出。如果測量值確實正常,則 68.3% 的測量值將在平均值的 1 個標準差范圍內,95.4% 的測量值在平均值的 2 個標準差范圍內,99.7% 的測量值在平均值的 3 個標準差范圍內。
但這與 SIL 有什么關系。
對于 SIL 1 函數,每小時的故障概率需要< 1e-6/h、SIL 2<1e-7/h、SIL 3< 1e-8/h 和 SIL 4 < 1e-9。例如,假設這是一個 SIL 2 函數,因此允許的最大 PFH 為 1e-6/h。因此,68%、95%或99.7%的時間是正確的是不夠的,除非很少需要安全功能(安全系統跳閘)。
大多數人認為PFH只考慮隨機硬件故障,但這不是PFH的定義。該定義不僅限于隨機硬件故障,還可以包括噪聲。

圖 2:IEC 61508-4:2010 中 PFH 的定義
因此,定義可以包括測量噪聲。
假設我們的安全功能由傳感器、邏輯塊和執行器組成。廣泛接受的PFH分配是傳感器的35%,因此現在分配給SIL 2安全功能的傳感器的最大PFH為350e-7 / h,并且進一步將其中50%分配給隨機硬件故障,50%分配給噪聲;那么噪聲引起的最大允許故障率為1.75e-7/h。
現在它變得棘手了。我們假設3D TOF傳感器正在保護籠子里的機器人。安全功能每天只能被調用一次(要求),以便需求速率為每小時 1/24。然而,它也可能是一個協作機器人,估計的需求率可能是每小時17.5次(選擇這個需求率來使數學整潛)。讓我們使用協作機器人示例,因此按需允許的最大故障概率變為 1.75e-7/h / 17.5/h =1e-8。
假設我們在距離1D TOF傳感器000m處對固定物體進行1,3次測量,并處理數字,得到20mm的標準偏差。我們需要什么保護帶來確保按需故障概率< 1e-8?Excel 函數 norm.inv 可以用來給我們一個 112mm 的答案,norm.inv(1e-8,0,20e-3)。因此,將我們的跳變點設置為1.112m可以保證故障率足夠低,以允許系統中的噪聲。
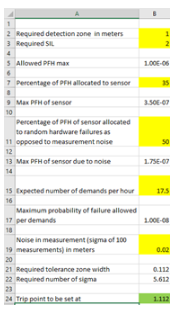
圖 3:用于計算的 Excel 電子表格
上面顯示了一個Excel電子表格,用于執行上述計算,其中用戶以黃色輸入所有數據,并在綠色單元格中給出跳變點。類似的邏輯可用于確定溫度、電壓或其他此類測量的保護帶。
對于112mm的假設標準偏差,這意味著5.6西格瑪的保護帶。
ISO 13849 采用簡化的安全方法。示例包括使用的風險評估,它僅確定PL,然后對PFHd施加更差的情況值,然后使用允許的PFHd作為范圍的最大值,而不是定量方法,該方法將給出PL范圍內的PFHd值(1e-6 / h to 1e-7 / h)。因此,如果風險評估確定需要PL d安全功能,則PFHd限值將變為1e-6 / h。
IEC 61496-3:2018 附錄 BB 建議將 5 西格瑪的值作為 3 個要求/小時的公差區,但沒有給出任何關于這是否足夠好的提示。對于PL c及以下可能沒問題,但對于PL d,它會耗盡整個PFHD預算和PL e將不足。
對于復雜的系統,我真的認為它們應該按照IEC 61508設計,ISO 13849和IEC 62061都一樣,但我認為人們仍然將它們視為設計標準而不是應用標準,但也許這是另一天的博客。
上述其他含義:
如果有多個變異源會影響整個系統的可重復性,則不需要誤差源的線性總和。RSS 總和應該沒問題,前提是多個錯誤源不相關。有關更多詳細信息,請參閱中心極限定理。
與其在數據表上引用最小/最大規格,不如引用分布的西格瑪
如果您只有最小/最大規格,那么如果沒有給出其他信息,則 sigma 可以估計為 (最大規格值 – 最小規格值)/6。然而,在某些情況下,這可能是非常保守的。
如果傳感器需要定期校準,那么重復性測量實際上應該包括每次測量的校準。那么為什么要將措施限制為一臺設備,它不應該真的是 1,000 臺設備。
對于像3D TOF傳感器這樣的東西,測量的西格瑪可能隨著到測試對象的距離而變化。因此,可能需要多西格瑪。
可以說,即使是IEC 61508也存在可靠性數字所需的置信水平僅為70%的問題。因此,硬件可靠性可能會違反PFH值,并且浪費了對噪聲測量的嚴格性。(我需要考慮更多。
您有時需要注意傳感器的哪個部分很重要。例如,在4/20mA DAC(數模轉換器)中,ADC(模數轉換器)作為診斷,重要的是DAC的可重復性還是ADC(模數轉換器)的可重復性。我會讓你自己弄清楚的。
審核編輯:郭婷
-
轉換器
+關注
關注
27文章
8726瀏覽量
147421 -
adc
+關注
關注
98文章
6513瀏覽量
545022 -
dac
+關注
關注
43文章
2299瀏覽量
191207
發布評論請先 登錄
相關推薦
在線負公差測徑儀 生產場景智能化
公差的等級及應用領域
未注公差角度的極限偏差,GB 11335-89
尺寸公差、形位公差、表面粗糙度的區別和聯系及選擇方法
指定PCB孔容公差有哪些技巧
尺寸公差、形位公差、表面粗糙度數值上的關系
使用PCB公差提高生產率
公差與配合100問,你都會嗎?
M12 17芯插座的公差范圍是多少






 工商網監
工商網監
評論