 通過51單片機實現直流電機調速
通過51單片機實現直流電機調速
一、項目背景及目的
隨著各種工業生產設備和機械設備的廣泛使用,直流電機調速技術的研究和應用越來越受到人們的重視,具有廣泛的應用前景。本項目通過51單片機實現直流電機調速功能,為實際工程應用提供一個可靠和有效的調速方案。

二、設計思路
(1)系統原理
本系統采用PWM(脈沖寬度調制)技術對直流電機進行調速控制。通過改變輸出信號的占空比,實現對直流電機的轉速控制。系統中包括51單片機、直流電機、電路板以及控制程序。
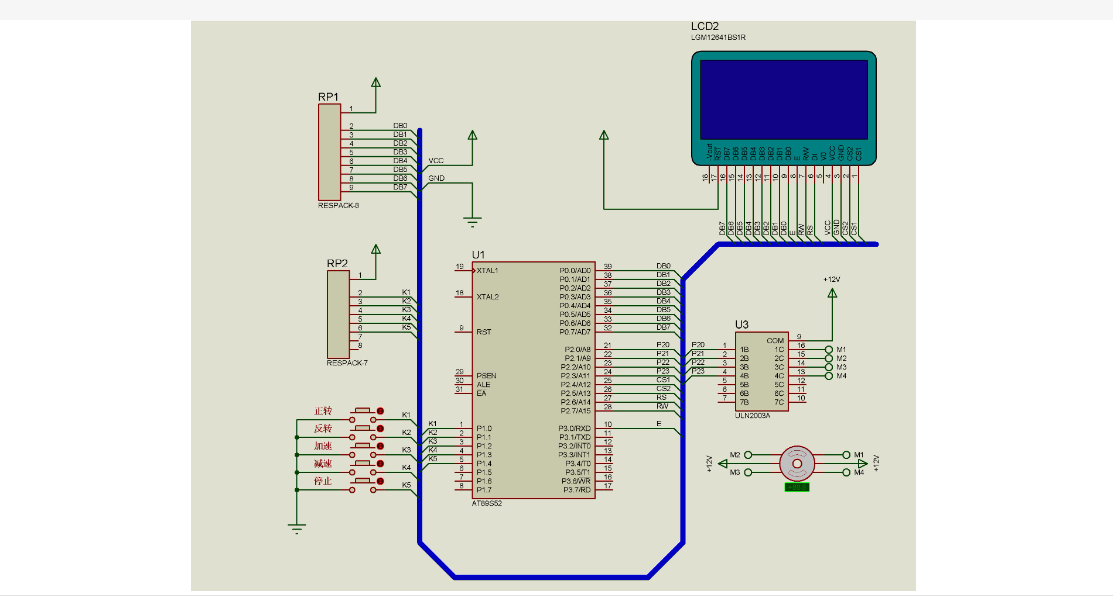
(2)硬件設計
- 電機:使用24V直流電機實現實際轉速控制。
- 驅動電路:使用四個寄生二極管三相全橋驅動電路控制電機,使電機可以正反轉,并控制電機的速度。
- 51單片機:使用STC89C52單片機,作為控制核心。單片機通過捕捉外部信號和計算控制電壓來實現對電機的轉速控制。同時還需通過編寫程序來控制電機的啟動、停止等操作。
- 顯示器:使用1602LCD顯示屏,顯示轉速和其他操作信息。
- 電源:使用24V直流電源作為系統的電源。
(3)軟件設計
- 采用C語言編寫單片機程序進行控制。
- 實現PWM技術控制直流電機的轉速。通過調整占空比來改變輸出電壓,從而達到控制直流電機轉速的目的。
- 使用定時器模塊實現計數來測量電機的轉速,并通過顯示器實時顯示。
- 設定按鍵和旋鈕控制,如啟動、停止電機等。
三、設計代碼
#include < reg52.h >
?
sbit MotorP = P1^0; //定義電機正極口
sbit MotorN = P1^1; //定義電機負極口
float V_motor = 0; //定義電機控制電壓
unsigned int speed = 0; //定義電機轉速
?
//初始化函數
void Init()
{
//定時器計數器及工作模式設置
TMOD |= 0x01; //T0定時器模式1
TH0 = 0xfc; //定時計數最大值,控制PWM頻率
TL0 = 0x00; //初值為0
TR0 = 1; //啟動T0定時器
?
//ADC設置
ADC_CONTR = 0x84; //啟動AD轉換器
}
?
//ADC采樣函數
float ADConvert()
{
ADC_CONTR &= 0xEF; //清除AD轉換結束標志位
ADC_CONTR |= 0x40; //啟動AD轉換
while(!(ADC_CONTR & 0x10)); //等待轉換完成
return ADC_RES; //返回轉換結果
}
?
//計算電機控制電壓函數
void ControlMotor()
{
unsigned int value = ADConvert(); //采集電位器輸出
V_motor = (value / 1023.0) * 5; //根據電壓分壓公式計算電機控制電壓
}
?
//控制電機函數
void DriveMotor()
{
if(V_motor >= 2.5) //當電位器輸出電壓大于2.5V時電機正轉,當小于2.5V時電機反轉
{
MotorP = 1;
MotorN = 0;
}
else if(V_motor < 2.5)
{
MotorP = 0;
MotorN = 1;
}
?
speed = 60 * 1000 / (3 * TH0 * 12); //根據定時器計數值計算電機轉速
}
?
//顯示函數
void Display()
{
//將電機轉速和狀態信息顯示在LCD顯示屏上
}
?
//主函數
void main()
{
Init(); //初始化函數
?
while(1)
{
ControlMotor(); //計算電機控制電壓
DriveMotor(); //控制電機運行
Display(); //顯示電機狀態
}
}
?