 自動駕駛汽車規避轉向的模型預測控制
自動駕駛汽車規避轉向的模型預測控制
層輸出的參考軌跡,結合車輛自身狀態,控制車輛跟蹤參考軌跡形式,實現車輛的縱、側向控制。車輛的縱向控制主要實現速度的跟蹤,側向控制則實現路徑的跟蹤。近年來,基于車輛運動學與動力學模型的模型預測控制(MPC)理論在自動駕駛車輛控制方面得到了廣泛的應用,MPC基于預先設定的系統模型,通過滾動優化,解決設定的優化問題并求解出控制輸入。MPC的優點在于能夠系統地處理輸入和輸出的約束,適用于多輸入多輸出控制系統,同時可以明確地考慮系統的時間延遲。
摘要:模型預測控制(MPC)常用于自動駕駛汽車的轉向控制,通常選擇簡單的車輛動力學模型作為參考模型。然而簡單的車輛動力學模型不足以用于需要較快轉向操作的規避轉向控制。本研究的目的是設計一種適用于規避轉向控制的MPC。在MPC設計過程中考慮了轉向系統模型和車輛模型。所提出的轉向模型在保持簡單結構的同時,還能夠有關擾動、執行器帶寬和電機電壓的信息。控制器以跟蹤誤差為代價,計算得到不違反電壓約束的要求較低期望轉向角。否則,電壓飽和時MPC將導致期望的規避轉向操作失敗,從而無法跟蹤轉向角。仿真和實驗結果表明,所設計的轉向控制器在允許的電壓范圍內成功地完成了了規避轉向操作,并且其性能優于基于簡單車輛模型的常規MPC控制器。
1引言
模型預測控制(MPC)是一種基于模型的控制方法,用于在滿足多個約束的同時控制動態系統。MPC中使用的模型表示系統的動力學特性。該模型能夠預測由控制變量的變化引起的系統狀態的變化。優化器會確定一系列優化控制變量,這些變量在能夠在滿足約束的前提下最小化成本函數值。MPC中使用的模型通常很簡單,并且出于減少計算量的考慮,常采用線性形式表示模型。通過當前狀態測量的反饋,可以減弱模型誤差所造成的影響(García等,1989)。
由于MPC能夠明確考慮約束條件和次優性能(Falcone等,2007a,2007b,2007c;Shim等,2012),因此常使用MPC設計自動駕駛汽車的轉向控制器。這些MPC中的模型大多基于車輛動力學模型,而沒有考慮執行器的動力學特性。MPC的控制輸出不是執行器層的信號(電壓、電流等),而是高層級的信號(轉向角、制動力等)。實際上,這類控制器的設計是在執行器控制器具有完美跟蹤能力的前提下進行的(Kim等人,2014)。
針對大多數的駕駛員操縱,例如以規則速度行駛的車道變更和轉彎操縱,不考慮執行器模型的控制器可以滿足其控制精度,因為執行器的帶寬足以覆蓋常規操作所需的動作頻率。然而,在某些操縱中,例如需要非常快速的轉向動作的規避轉向操縱(Keller等,2014),僅有簡單的車輛動力學模型是不夠的。在這種情況下,通常在常規操作中可忽略的模型誤差或模型的缺失引起的影響將變得十分顯著,或者如果在模型中未適當考慮擾動,擾動的數值將會過大,并導致對于擾動的抑制不足。
這項研究的目的是為轉向控制器設計一種適用于規避轉向操縱的MPC。為此,我們需要在MPC設計中同時考慮轉向系統模型與車輛模型。該模型應提供有關不不可忽視干擾的信息,并通過監視執行器的性能極限來考慮執行器帶寬。但是,為了保持較低的計算負荷,應使結構盡可能的簡單。
2研究問題描述
為了代替人類駕駛員,配備有自動轉向系統的自動駕駛汽車需要具備決策、控制、執行等方面的自動功能。在自動駕駛汽車中,轉向系統負責執行轉向操作。圖1顯示了自動轉向控制功能的常用框架(Kim和Song,2002年)。在高層級控制器中確定所需的轉向角,由電機控制器或ECU調節電機電流以跟蹤所需的轉向角。
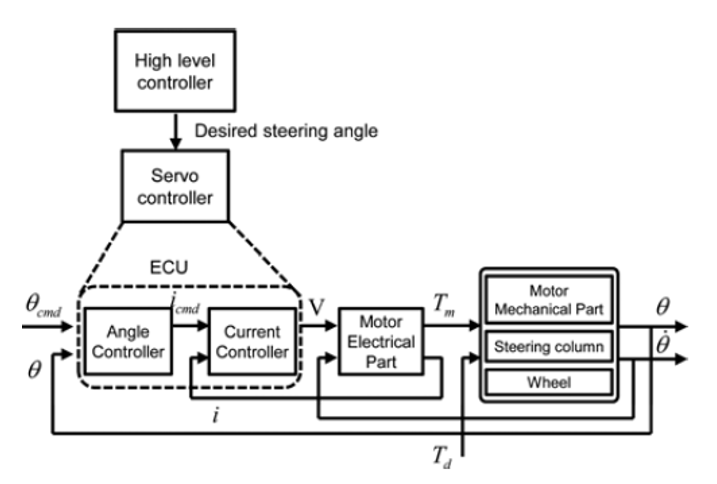
圖1 轉向系統功能配置
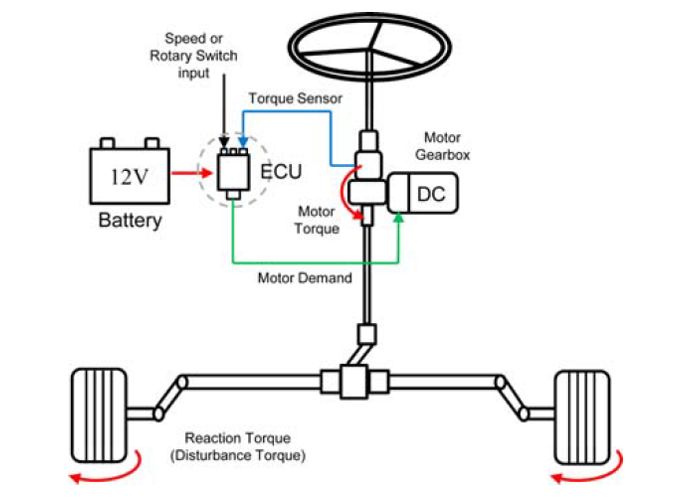
圖2 電動助力轉向(EPS)系統結構
目標改造車輛選擇簧載質量為1370kg的常規D級轎車,例如Audi A4、BMW 3系列等。如圖2所示,自動駕駛汽車中最常見的轉向系統是電動助力轉向系統(EPS)。EPS中的ECU提供了伺服控制,以在內外擾動下跟蹤目標轉向角。在ECU中設置了兩個伺服控制器,分別為用于計算目標電流的轉向角控制器、用于計算目標電壓的電流控制器(Wei等人,2010)。兩個控制器的控制分別來自于轉向系統的機械慣性與輪胎的擾動轉矩、電機線圈的電感與反電動勢等。
對于轉向系統而言,其能提供的最大角速度和最大角加速度取決于電機的最大扭矩和車輛操縱過程中來自輪胎的干擾扭矩。電機轉矩與提供的電流成正比,而電流被電壓限制動態飽和,對于常見的乘用車,該電壓限制為12 V(Saifia等,2015)。來自輪胎的干擾扭矩則源自橫向車輛操縱期間的輪胎側向力,與輪胎側偏角成函數關系。
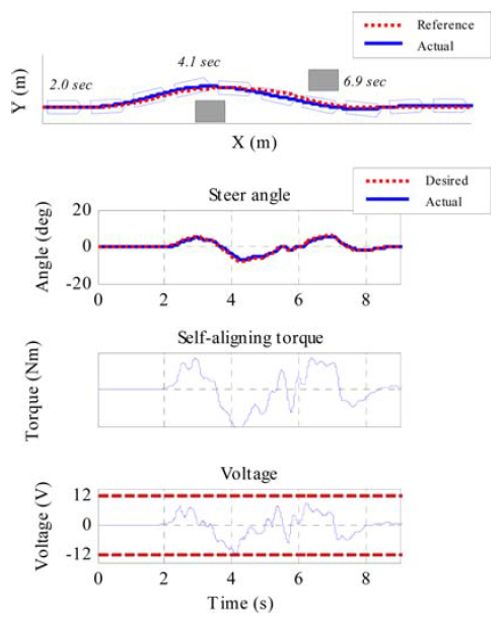
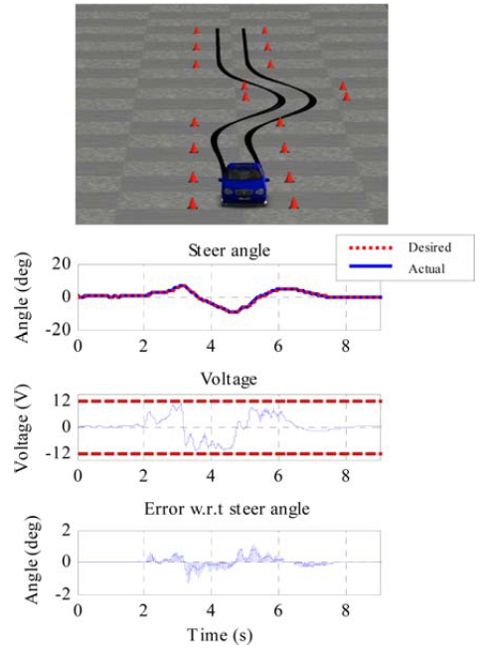
如圖3(a)所示,當典型的換道操作所需的轉向角適中時,由于系統慣性而存在一些相位滯后,但角度控制器和電流控制器的跟蹤性能也是可以接受的,也并未發生電壓飽和問題(Li等;2011;Yoshida等,2008;Zaremba等,1998)。
但在轉向要求過高時,即使輪胎滑移角處于很小的范圍之內,也會出現違反電壓飽和限制的情況。如圖3(b)所示,當車輛執行規避轉向操作時,轉向角速度與角加速度遠高于圖3(a)中操作對應的數值。可以看到,高層控制器仍能夠計算得到適當的目標轉向角,但伺服控制器無法對其進行跟蹤。可能的原因包括:
(1)轉向角變化的更快,使得系統慣性引起的相位滯后不可忽略;
(2)規避轉向操作時的擾動轉矩遠高于典型換道操作時的擾動轉矩;
(3)對應目標轉角的期望電壓值高于12V,相位滯后的值無法通過12V電壓得到充分的補償。
因此在確定高層控制器以及參考模型時,應考慮上述三個因素。
(a)
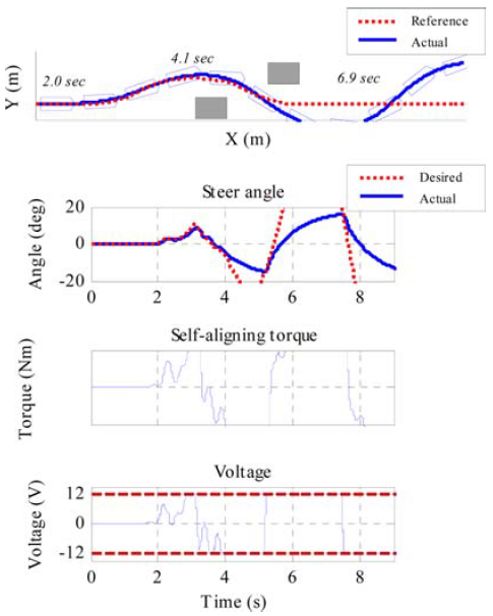
(b) 圖3 常規轉向與規避轉向工況下的跟蹤與控制情況
3控制系統建模
控制系統建模包括車輛模型、轉向系統模型、擾動模型、電壓模型。 車輛模型采用道路跟隨模型,該模型基于二自由度自行車模型,增加了車輛相對于目標軌跡的側向位移、航向角誤差這兩個附加狀態(Ulsoy等,2012),可表示為:
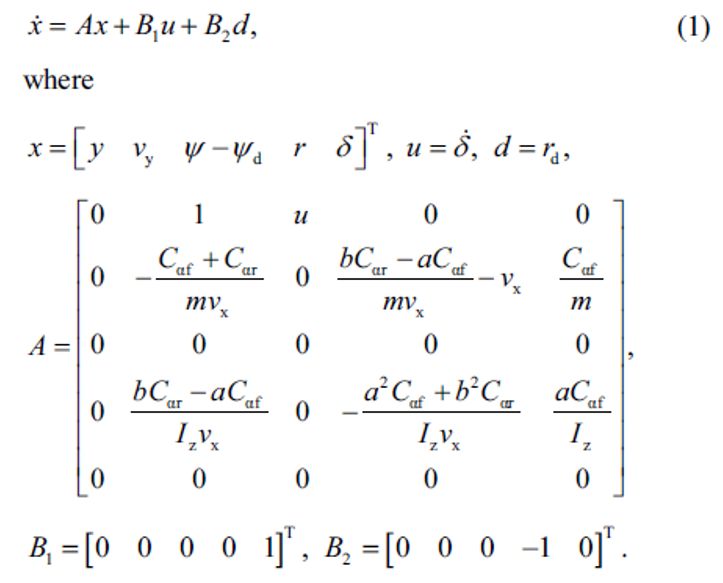
系統的輸入量為方向盤轉角的角速度,擾動量為由目標軌跡確定的期望橫擺角速度。輸入量選擇轉角的角速度,是為了防止MPC方程中方向盤轉角噪聲過大。
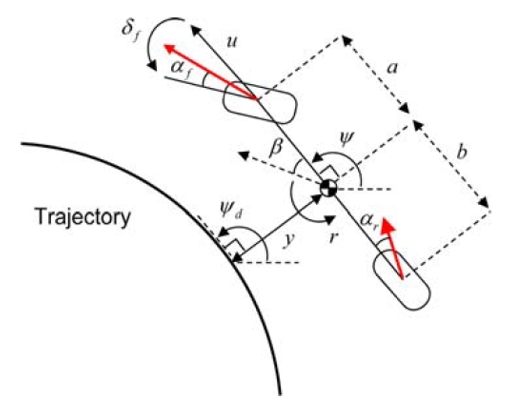
圖4道路跟隨車輛模型
轉向系統由許多子系統構成,直接建模得到的模型復雜度很高,且對于控制器設計而言高逼真的轉向系統模型是不必要的。因此可采用相對簡單的二階線性模型描述轉向系統:

該系統有兩個輸入:ECU的控制輸入與輪胎的擾動轉矩。由于電氣部分與ECU部分的動態特性快于機械部分,因此可以將上式簡化為:

在雙移線工況下將上述簡化后的轉向系統模型與原始系統進行比較,如圖5所示,簡化后的系統仍具有有意義的物理狀態,且能夠較容易的獲得對應的狀態空間形式。
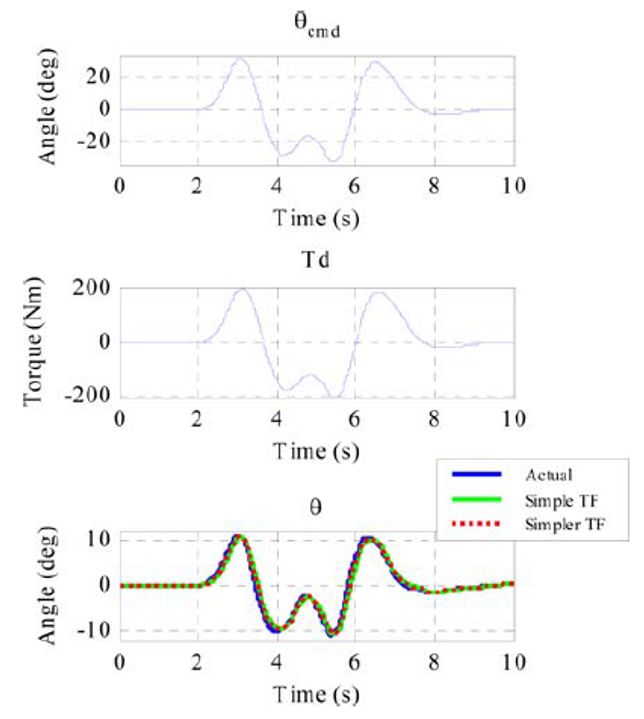
圖5使用雙移線操作進行轉向系統模型識別的結果
擾動模型指輪胎的擾動轉矩模型。輪胎的擾動轉矩與輪胎的側向力有關,而輪胎的側向力與輪胎滑移角有關。滑移角較小時,側向力與滑移角呈線性關系;滑移角較大時,該關系變為非線性。假設該線性關系可表示為:
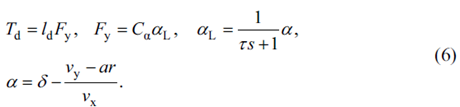
本文中提到的擾動模型是在小輪胎滑移角的前提下建立的,假設關系線性的有效范圍為-4°~4°。 上述的三個模型均未包含任何有關電機電壓信息的狀態、輸出量等,如果將電壓信息添加到上述模型中,模型的規模與復雜程度將增加,并影響MPC的實際控制效果。因此本文針對電機電壓建立了專門的電壓模型,構建電壓與轉向角之間的函數關系,使用轉向系統的狀態與傳遞函數計算得到電機電壓的值。使用與前述類似的簡化方法,構建模型為:

將擾動模型與轉向模型表示的車輛狀態代入,可得到:
4控制器的設計
在III中,我們得到了MPC中將要使用到的模型,包括5狀態的車輛模型、3狀態的轉向系統模型、1狀態的擾動模型、0狀態的電機電壓模型,模型的總狀態數為9。 為了減少計算量,將模型分別放入兩個MPC結構之中,如圖6所示,一個為車輛模型MPC,另一個為轉向系統模型MPC,使得9個狀態的優化問題轉換為兩個具有5個狀態、3個狀態的小型優化問題的組合,減少了計算量。擾動模型位于MPC結構的外部。而電壓模型包含在兩個MPC模塊中,使得這兩個模塊確定的指令角度都不會使得電壓超過飽和限值。由于電壓模型是狀態的代數方程,因此電壓模型的引入不會增加MPC方程的維數,即不增加方程的復雜程度。
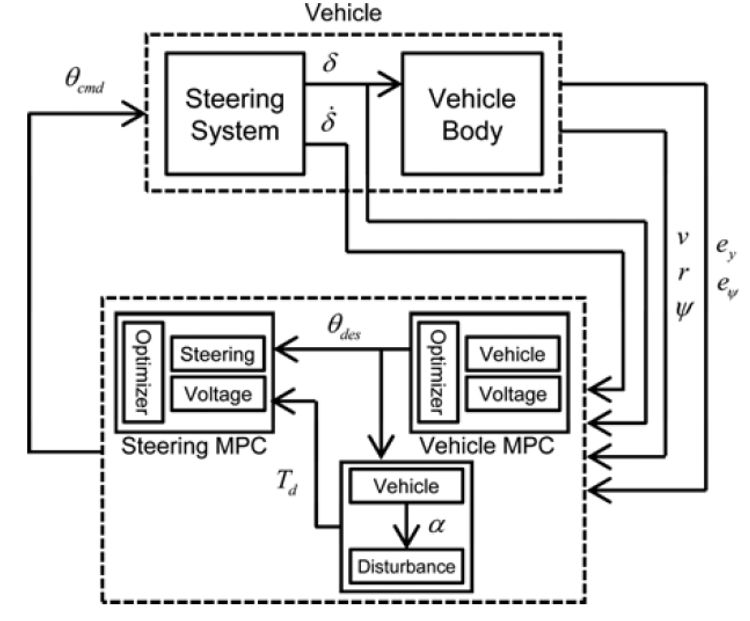
圖6轉向系統與控制系統結構
該MPC中的優化問題由具有線性約束的線性系統表示,因此可轉換為典型的二次規劃問題。對于式(14)表示的離散系統,可給出對應的成本函數為式(14)


也可以給出系統的輸出約束與輸入約束如下:

 該部分的完整解釋詳見Son et al.,2017。 對于車輛模型MPC,在使用線性MPC的設計綜合時,需要選擇系統的輸出、約束以及加權矩陣的值。基于車輛模型MPC的目標是使得車輛相對于參考路徑的側向位移與航向角誤差最小,同時將輪胎滑移角、轉向角、電壓等保持在相應的極限范圍內(式19)。
該部分的完整解釋詳見Son et al.,2017。 對于車輛模型MPC,在使用線性MPC的設計綜合時,需要選擇系統的輸出、約束以及加權矩陣的值。基于車輛模型MPC的目標是使得車輛相對于參考路徑的側向位移與航向角誤差最小,同時將輪胎滑移角、轉向角、電壓等保持在相應的極限范圍內(式19)。
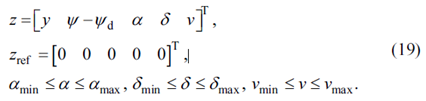
矩陣R被設計為非負標量,矩陣Q被設計為式(20)所示的形式,原因是我們只希望對相對側向位移與相對航向角誤差進行懲罰,因此在對角線上僅有第一與第二個元素為非零。

對于轉向系統模型MPC,其目標是最小化方向盤轉角的跟蹤誤差,同時將電壓保持在極限范圍以內。
 矩陣R被設計為非負標量,矩陣Q被設計為式(22)所示的形式,理由與車輛模型MPC中的矩陣Q類似。指令角度相對于時間的導數受到R的懲罰,從而抑制了指令角度的過大噪聲。
矩陣R被設計為非負標量,矩陣Q被設計為式(22)所示的形式,理由與車輛模型MPC中的矩陣Q類似。指令角度相對于時間的導數受到R的懲罰,從而抑制了指令角度的過大噪聲。

5仿真與實驗驗證
為了驗證本文所提出的用于規避轉向條件下跟蹤控制的MPC,我們對其進行了仿真與實驗測試。為了進行比較,我們設計了兩個基于MPC的控制器,一個為僅基于車輛模型的常規MPC,另一個為基于車輛模型與轉向系統模型的改進MPC。
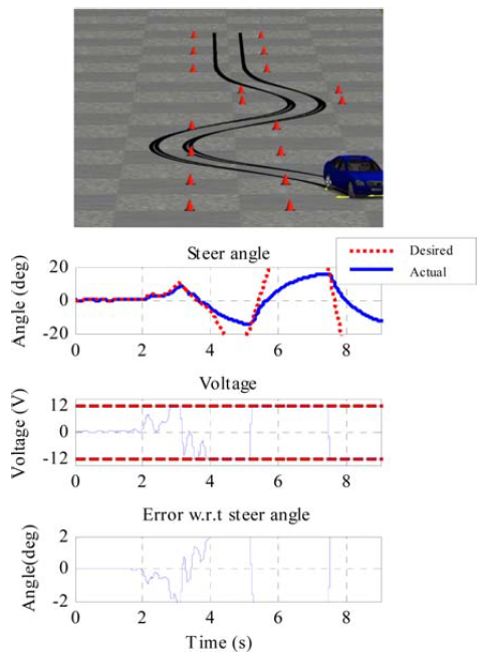
使用CarSim對進行仿真驗證,仿真車速為30km/h。圖7(a)、圖7(b)分別為常規MPC與改進MPC在規避轉向操作下的仿真結果。可以看到,常規MPC可以計算出適當的期望轉向角,但由于電壓飽和,伺服控制器無法跟蹤期望轉向角。而改進MPC在考慮擾動與電壓限制的情況下計算出了相應的期望轉向角,使得伺服控制器能夠成功對其實現跟蹤。仿真結果表明,額外考慮轉向系統模型的MPC具有比常規MPC更加精確的實際系統模型,并能夠有效處理系統約束問題。
(a)
(b) 圖7不同MPC在規避轉向操縱下的仿真表現
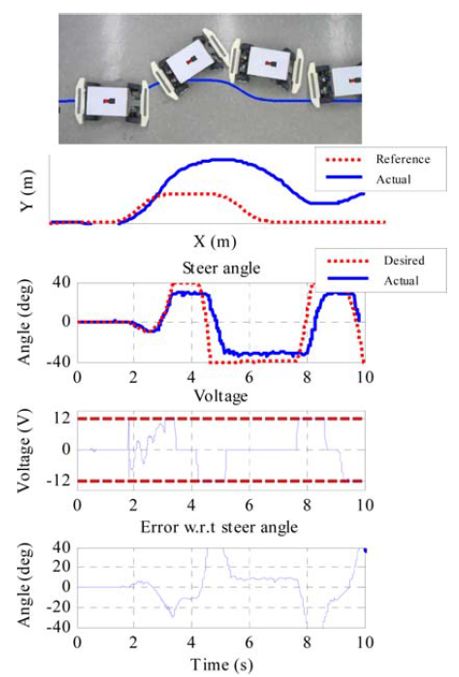
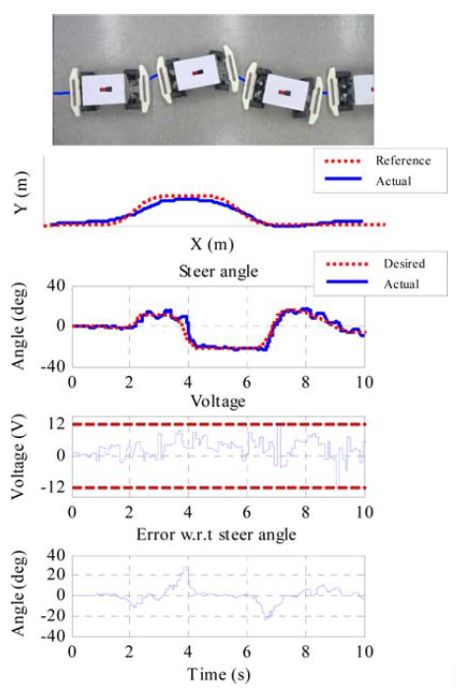
除了仿真驗證,還進行了相應的實驗驗證。如圖8所示,實驗系統由標定車輛、攝像頭、快速控制原型系統dSPACE等組成。對稱布置的標記器附著在車輛的頂部,標記器跟蹤算法提供了車輛的位置與航向角;攝像頭獲取的車輛信息與車輛的傳感器信號則通過無線通信傳輸到dSPACE中。實驗結果如圖9(a)、圖9(b)所示,實驗中的標定車速為0.2m/s。可以看到,常規MPC為車輛提供了計算得到的期望轉向角,但違反了電壓限制,因此車輛無法遵循所需的路徑行駛。而改進MPC控制的車輛在允許的電壓范圍內成功地跟蹤了所需路徑。試驗結果表明,按照該比例縮放并標定的車輛,其轉向系統的物理極限與電壓約束得到了明確的處理,并驗證了改進MPC的次優性能。
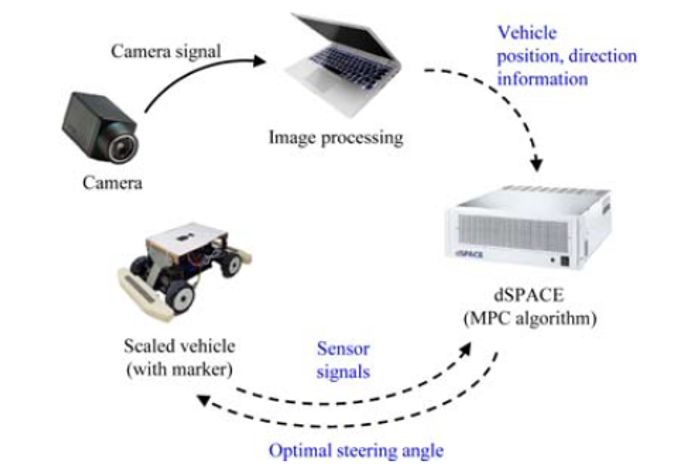
圖8實驗系統結構
(a)
(b)
圖8不同MPC在規避轉向操縱下的實驗表現
6結論
本文設計了一種用于自動駕駛汽車轉向控制器的MPC,該MPC適用于轉向操縱中的規避轉向操縱。規避轉向操縱需要進行非常快速的轉向操作,而僅依靠簡單的車輛動力學構建參考模型是不夠的。因此,本文在MPC設計中同時考慮了轉向系統模型與車輛模型。
本文對轉向系統進行了建模,該模型可以在保持簡單結構以減少計算負荷的同時,提供有關擾動、系統帶寬和電壓狀態的信息。仿真和實驗結果表明,在允許的電壓范圍內,該控制器能夠很好地完成跟蹤任務,并且在規避轉向操作期間的表現優于僅基于車輛模型的常規MPC。
文章來源:汽車自動駕駛技術
審核編輯:湯梓紅
-
控制器
+關注
關注
112文章
16364瀏覽量
178075 -
ecu
+關注
關注
14文章
886瀏覽量
54504 -
MPC
+關注
關注
2文章
36瀏覽量
21229 -
模型
+關注
關注
1文章
3244瀏覽量
48843 -
自動駕駛
+關注
關注
784文章
13812瀏覽量
166461
原文標題:自動駕駛汽車規避轉向的模型預測控制
文章出處:【微信號:談思實驗室,微信公眾號:談思實驗室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論