 步進電機轉速采集、伺服電機轉速測量脈沖采集模塊
步進電機轉速采集、伺服電機轉速測量脈沖采集模塊
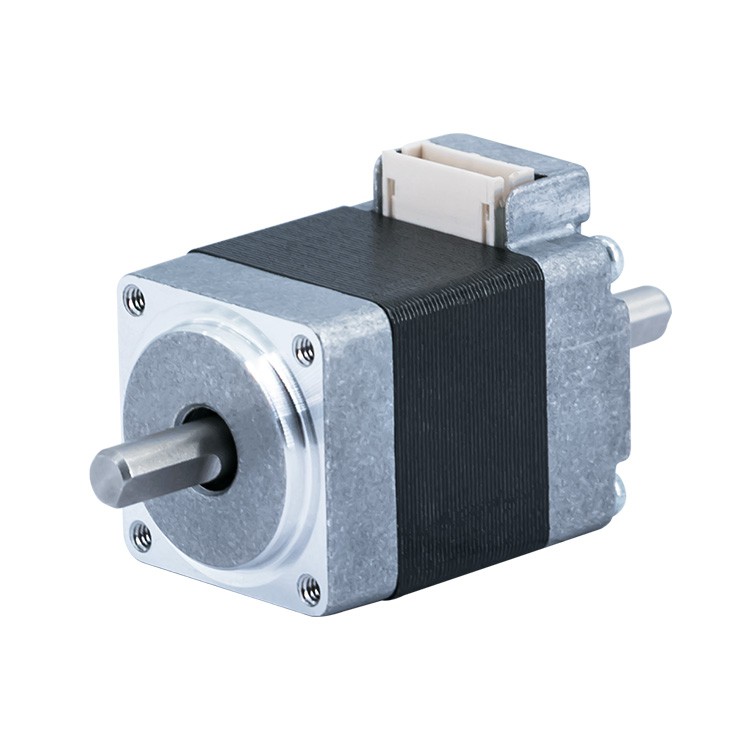
步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機。每輸入一個脈沖信號,轉子就轉動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖頻率成正比。因此,步進電動機又稱脈沖電動機
步進電機又稱為脈沖電機,基于最基本的電磁鐵原理,它是一種可以自由回轉的電磁鐵,其動作原理是依靠氣隙磁導的變化來產生電磁轉矩。其原始模型是起源于1830年至1860年間。1870年前后開始以控制為目的的嘗試,應用于氫弧燈的電極輸送機構中。這被認為是最初的步進電機。1923年,James Weir French發明三相可變磁阻型(Variable reluctance),此為步進電機前身。二十世紀初,步進電機廣泛應用在了電話自動交換機中。由于西方資本主義列強爭奪殖民地,步進電機在缺乏交流電源的船舶和飛機等獨立系統中得到了廣泛的使用。二十世紀五十年代后期晶體管的發明也逐漸應用在步進電機上,對于數字化的控制變得更為容易。到了八十年代后,由于廉價的微型計算機以多功能的姿態出現,步進電機的控制方式更加靈活多樣。 [2]
步進電機相對于其它控制用途電機的最大區別是,它接收數字控制信號(電脈沖信號)并轉化成與之相對應的角位移或直線位移,它本身就是一個完成數字模式轉化的執行元件。而且它可開環位置控制,輸入一個脈沖信號就得到一個規定的位置增量,這樣的所謂增量位置控制系統與傳統的直流控制系統相比,其成本明顯減低,幾乎不必進行系統調整。步進電機的角位移量與輸入的脈沖個數嚴格成正比,而且在時間上與脈沖同步。因而只要控制脈沖的數量、頻率和電機繞組的相序,即可獲得所需的轉角、速度和方向。 [2]
我國的步進電機在二十世紀七十年代初開始起步,七十年代中期至八十年代中期為成品發展階段,新品種和高性能電機不斷開發,目前,隨著科學技術的發展,特別是永磁材料、半導體技術、計算機技術的發展,使步進電機在眾多領域得到了廣泛應用。 [2]
差分編碼器轉換成標準Modbus RTU協議
編碼器5V差分信號直接輸入
可用作差分編碼器計數器或者轉速測量
差分5V信號直接輸入,編碼器計數,可識別正反轉
也可以設置作為2路獨立DI高速計數器
編碼器計數值支持斷電自動保存
模塊可以輸出5V的電源給編碼器供電
寬電源供電范圍:8 ~ 32VDC
可靠性高,編程方便,易于應用
標準DIN35導軌安裝,方便集中布線
用戶可編程設置模塊地址、波特率等
編碼器脈沖信號測量
流量計脈沖計數或流量測量
生產線產品計數
物流包裹數量計數
編碼器信號遠傳到工控機
IBF157產品實現傳感器和主機之間的信號采集,用來解碼編碼器信號。IBF157系列產品可應用在 RS-485總線工業自動化控制系統,自動化機床,工業機器人,三坐標定位系統,位移測量,行程測量,角度測量,轉速測量,流量測量,產品計數等等。
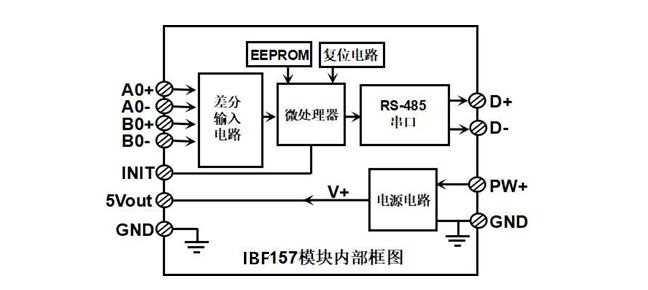
產品包括信號采集,脈沖信號捕捉,信號轉換和RS-485串行通信。每個串口最多可接255只 IBF157系列模塊,通訊方式采用ASCII碼通訊協議或MODBUS RTU通訊協議,波特率可由代碼設置,能與其他廠家的控制模塊掛在同一RS-485總線上,便于計算機編程。
信號輸入
1路5V差分編碼器信號輸入或2路獨立5V差分計數器。
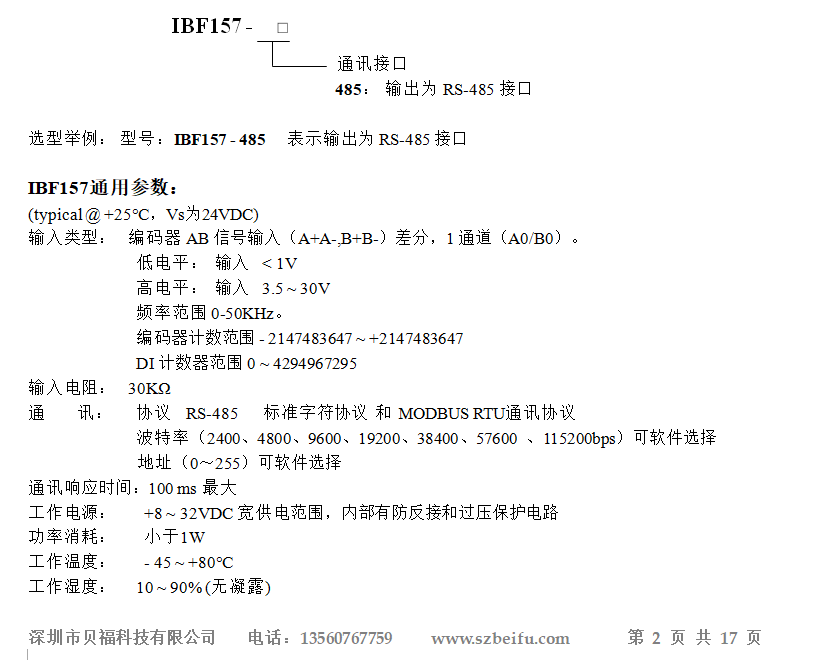
通訊協議
通訊接口: 1路標準的RS-485通訊接口。
通訊協議:支持兩種協議,命令集定義的字符協議和MODBUS RTU通訊協議。模塊自動識別通訊協議,能實現與多種品牌的PLC、RTU或計算機監控系統進行網絡通訊。
數據格式:10位。1位起始位,8位數據位,1位停止位。無校驗。
通訊地址(0~255)和波特率(2400、4800、9600、19200、38400、57600 、115200bps)均可設定;通訊網絡最長距離可達1200米,通過雙絞屏蔽電纜連接。
通訊接口高抗干擾設計,±15KV ESD保護,通信響應時間小于100mS。
抗干擾
可根據需要設置奇偶校驗。模塊內部有瞬態抑制二極管,可以有效抑制各種浪涌脈沖,保護模塊,內部的數字濾波,也可以很好的抑制來自電網的工頻干擾。

審核編輯:湯梓紅
-
步進電機
+關注
關注
151文章
3115瀏覽量
147653 -
伺服電機
+關注
關注
85文章
2053瀏覽量
58023
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論