") 輪轂電機(jī)的原理與結(jié)構(gòu) 輪轂電機(jī)的優(yōu)缺點(diǎn)
輪轂電機(jī)的原理與結(jié)構(gòu) 輪轂電機(jī)的優(yōu)缺點(diǎn)
輪轂電機(jī)技術(shù)并非新生事物,知名的汽車大師費(fèi)迪南德·保時(shí)捷就在1896年獲得到了英國賦予的輪轂電機(jī)發(fā)明專利,裝備輪轂電機(jī)的電動(dòng)車也隨之誕生,早在1900年,人類已經(jīng)制造出了前輪裝備輪轂電機(jī)的電動(dòng)汽車,在20世紀(jì)70年代,這一技術(shù)在礦山運(yùn)輸車等領(lǐng)域得到應(yīng)用。
而對(duì)于乘用車所用的輪轂電機(jī),日系廠商對(duì)于此項(xiàng)技術(shù)研發(fā)開展較早,目前處于領(lǐng)先地位,包括通用、豐田在內(nèi)的國際汽車巨頭也都對(duì)該技術(shù)有所涉足。
輪轂電機(jī)的結(jié)構(gòu)
輪轂又叫輪圈、胎鈴,是輪胎內(nèi)廓支撐輪胎的圓桶形的、中心裝在軸上的金屬部件,從造型設(shè)計(jì)、材料運(yùn)用,尺寸上都有所不同。
在19世紀(jì)末20世紀(jì)初的這段時(shí)間,輪輞、輪轂、輻條開始通過鑄造工藝合為一體,輪轂樣式開始發(fā)生了變化,緊接著就是就是我們現(xiàn)在會(huì)用到的鋼輪轂。
鋼輪轂的特點(diǎn)就是看起來非常的沉重和樸實(shí),且配色單一,隨著汽車工業(yè)發(fā)展,顯得與外觀設(shè)計(jì)格格不入。
20世紀(jì)30年代,德國人在技術(shù)上的突破為鋁合金輪轂的發(fā)展奠定了基礎(chǔ);在1958年,出現(xiàn)了整體鑄造的鋁合金輪轂,現(xiàn)在市面上大部分車型都配備了鋁合金輪轂。鋁合金輪轂的特點(diǎn)造型多樣化,重量輕,相比鋼輪轂就是質(zhì)的飛躍啊。
輪轂除了設(shè)計(jì)樣式、類型不同之外,但很多的構(gòu)成部分都是一樣的,主要由輪輞與輪輻構(gòu)成。另外所有輪轂包含的參數(shù)很多,例如、邊槽級(jí)別、稱重級(jí)別、孔距、偏距、寬度等等。
好了,介紹完的輪轂一些小知識(shí),我們還是來點(diǎn)“裝逼”的進(jìn)階知識(shí)---輪轂電機(jī)。前面我們說過,輪轂電機(jī)就是裝在輪轂里的電機(jī)(好吧,是很裝逼),他的特點(diǎn)是:
省略大量傳動(dòng)部件,讓車輛結(jié)構(gòu)更簡(jiǎn)單
對(duì)于傳統(tǒng)車輛來說,離合器、變速器、傳動(dòng)軸、差速器乃至分動(dòng)器都是必不可少的,而這些部件不但重量不輕、讓車輛的結(jié)構(gòu)更為復(fù)雜,同時(shí)也存在需要定期維護(hù)和故障率的問題。但是輪轂電機(jī)就很好地解決了這個(gè)問題。
除了結(jié)構(gòu)更為簡(jiǎn)單之外,采用輪轂電機(jī)驅(qū)動(dòng)的車輛可以獲得更好的空間利用率,同時(shí)傳動(dòng)效率也要高出不少。
可實(shí)現(xiàn)多種復(fù)雜的驅(qū)動(dòng)方式
由于輪轂電機(jī)具備單個(gè)車輪獨(dú)立驅(qū)動(dòng)的特性,因此無論是前驅(qū)、后驅(qū)還是四驅(qū)形式,它都可以比較輕松地實(shí)現(xiàn),全時(shí)四驅(qū)在輪轂電機(jī)驅(qū)動(dòng)的車輛上實(shí)現(xiàn)起來非常容易。
同時(shí)輪轂電機(jī)可以通過左右車輪的不同轉(zhuǎn)速甚至反轉(zhuǎn)實(shí)現(xiàn)類似履帶式車輛的差動(dòng)轉(zhuǎn)向,大大減小車輛的轉(zhuǎn)彎半徑,在特殊情況下幾乎可以實(shí)現(xiàn)原地轉(zhuǎn)向(不過此時(shí)對(duì)車輛轉(zhuǎn)向機(jī)構(gòu)和輪胎的磨損較大),對(duì)于特種車輛很有價(jià)值。
給個(gè)形象的比喻吧,輪轂電機(jī)就是黑科技啊,簡(jiǎn)直就是現(xiàn)代版的“風(fēng)火輪”有木有。
它將動(dòng)力、傳動(dòng)系統(tǒng)和制動(dòng)裝置都整合到輪轂內(nèi),得以將電動(dòng)車輛的機(jī)械部分大為簡(jiǎn)化,同時(shí)可以輕松實(shí)現(xiàn)多種復(fù)雜的驅(qū)動(dòng)方式。
這種黑科技經(jīng)過一個(gè)多世紀(jì)的發(fā)展,漸漸的從高效率的無刷電機(jī)淘汰了有刷電機(jī);直接測(cè)量電機(jī)反電動(dòng)勢(shì)而知道轉(zhuǎn)子的位置,進(jìn)行換相。
在啟動(dòng)前就知道轉(zhuǎn)子和定子的相對(duì)位置而使用傳感器;從磁鋼材料的更新慢慢淘汰齒輪;日新月異。
輪轂電機(jī)外形基本一致,大都為扁平型,但電機(jī)類型、結(jié)構(gòu)形式、驅(qū)動(dòng)方式差別較大,分類如下:
按電機(jī)類型分類:目前應(yīng)用于電動(dòng)輪轂的電機(jī)主要有四大類,即永磁電機(jī)(PM)、異步電機(jī)(IM)、開關(guān)磁阻電機(jī)(SRM)和橫向磁通電機(jī)(TFM)。這其中,永磁電機(jī)的應(yīng)用最為普遍,而橫向磁通電機(jī)則是一類極具競(jìng)爭(zhēng)力的低速大扭矩新型電機(jī)。
按結(jié)構(gòu)形式分類:從主磁通行經(jīng)路徑看,它囊括了徑向磁場(chǎng)(radial )、軸向磁場(chǎng)(axial )、橫向磁通(transverse)全部三種基本形式。從運(yùn)動(dòng)方式看,亦有內(nèi)轉(zhuǎn)子、外轉(zhuǎn)子和雙轉(zhuǎn)子之分。
其中,雙轉(zhuǎn)子結(jié)構(gòu)最有新意。內(nèi)轉(zhuǎn)子主動(dòng),外轉(zhuǎn)子從動(dòng),二者通過一組行星齒輪傳遞動(dòng)力,實(shí)現(xiàn)反向旋轉(zhuǎn),使磁場(chǎng)切割導(dǎo)體的速度為內(nèi)、外轉(zhuǎn)子速度之和。
顯然,這種速度迭加以及機(jī)械聯(lián)動(dòng)的巧妙組合,既給電機(jī)設(shè)計(jì)帶來了張馳空間,又起到了緩釋負(fù)載擾動(dòng)、平抑沖擊負(fù)荷、有效保護(hù)電池的作用。
按驅(qū)動(dòng)方式分類:直接驅(qū)動(dòng)時(shí),電機(jī)多采用外轉(zhuǎn)子結(jié)構(gòu),即轉(zhuǎn)子直接帶動(dòng)輪轂旋轉(zhuǎn),因而轉(zhuǎn)速較低。與此相對(duì)應(yīng),間接驅(qū)動(dòng)時(shí),電機(jī)則多為內(nèi)轉(zhuǎn)子結(jié)構(gòu),轉(zhuǎn)速較高,通過行星輪加齒環(huán)機(jī)構(gòu)實(shí)現(xiàn)減速,帶動(dòng)輪轂旋轉(zhuǎn),因而也稱之為減速驅(qū)動(dòng)。
按旋轉(zhuǎn)速度分類:輪轂電機(jī)還有高速和低速之分,但對(duì)應(yīng)的轉(zhuǎn)速范圍并沒有明確的界定,視應(yīng)用對(duì)象不同而不同。
通常,僅當(dāng)驅(qū)動(dòng)方式確定之后,高、低速范圍的界定才具有相對(duì)準(zhǔn)確的含義,即直接驅(qū)動(dòng)一般對(duì)應(yīng)于低速電機(jī)(體積大,耗材多,功率密度小,噪聲低),而間接驅(qū)動(dòng)則多對(duì)應(yīng)于高速電機(jī)(體積小,耗材少,功率密度大,噪聲高)。
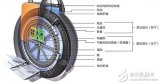
純電轎車所采用的輪轂電機(jī)的驅(qū)動(dòng)方式為外轉(zhuǎn)子直接驅(qū)動(dòng),電機(jī)定子、轉(zhuǎn)子以及逆變器集成為一體,由8個(gè)邏輯上的子電機(jī)組成,使用共同的轉(zhuǎn)子,并通過算法實(shí)現(xiàn)各子電機(jī)的獨(dú)立、協(xié)同控制。
這種“分布式”的結(jié)構(gòu)可降低對(duì)每個(gè)子電機(jī)的功率要求,因此可以采用小體積、低成本的功率電子器件,使得整個(gè)電機(jī)可以集成得非常緊湊;
而通過對(duì)8個(gè)子電機(jī)進(jìn)行合理的協(xié)同控制,可將各子電機(jī)輸出的功率、扭矩進(jìn)行疊加,實(shí)現(xiàn)整個(gè)電機(jī)強(qiáng)勁的驅(qū)動(dòng)力;同時(shí),若其中1個(gè)子電機(jī)發(fā)生故障,其他的電機(jī)仍可以繼續(xù)正常丁作,而不會(huì)導(dǎo)致汽車直接拋錨。
輪轂電機(jī)驅(qū)動(dòng)系統(tǒng)根據(jù)電機(jī)的轉(zhuǎn)子形式主要分為兩種結(jié)構(gòu)形式:內(nèi)轉(zhuǎn)子型和外轉(zhuǎn)子型。其中,外轉(zhuǎn)子型具有結(jié)構(gòu)簡(jiǎn)單、可靠性高、調(diào)速范圍寬、輸出轉(zhuǎn)矩大、噪音低、效率高等諸多優(yōu)點(diǎn),已經(jīng)成為輪轂電機(jī)的主流結(jié)構(gòu)。
輪轂電機(jī)的控制技術(shù)
無刷電機(jī)啟動(dòng)前想知道轉(zhuǎn)子和定子的相對(duì)位置必須使用傳感器。無感電機(jī)直接測(cè)量電機(jī)反電動(dòng)勢(shì)而知道轉(zhuǎn)子的位置,由控制器驅(qū)動(dòng)功率管進(jìn)行換相。
雖然存儲(chǔ)器能記錄定子和轉(zhuǎn)子的相對(duì)位置,但對(duì)于極緩慢的轉(zhuǎn)動(dòng) 系統(tǒng)將無法理解電機(jī)繞組反電動(dòng)勢(shì)的波形。電機(jī)達(dá)到一定轉(zhuǎn)速時(shí)由于受慣性限制波峰波谷都代表一定的角度,剎車時(shí)就關(guān)閉電機(jī)。所以使用磁傳感器的輪轂電機(jī)是主流。
輪轂電機(jī)原理圖紅色磁鋼轉(zhuǎn)子處在死角位置,要靠藍(lán)色磁鋼轉(zhuǎn)子上方的繞組通電,走出死角。圖2所示電機(jī)就沒有死角,只要知道轉(zhuǎn)子的位置,就知道怎樣驅(qū)動(dòng)功率管。
圖1圖2所示電機(jī)看上去象是把直線電機(jī)卷了起來,繞組通電 好比是用食物引誘著驢子(磁鋼)不停地跑,卻總保持著一段距離,它功率較大,比較重結(jié)構(gòu)簡(jiǎn)單噪音低。
磁力手動(dòng)齒輪離合高速無刷輪轂電機(jī)利用三個(gè)大而薄的2模鋼齒輪減速來得到所需動(dòng)力。需要滑行時(shí) 由偏心離合手柄拉動(dòng)軸心離合傳動(dòng)的軸、活塞及拉鉤,使電機(jī)齒輪外轉(zhuǎn)子端蓋位移,電機(jī)齒輪與傳動(dòng)齒輪分離。不要滑行時(shí)利用電機(jī)磁力復(fù)位實(shí)現(xiàn)齒輪手動(dòng)嚙合,其離合機(jī)構(gòu)簡(jiǎn)單,省去 超越離合器。
其控制技術(shù)有:無位置傳感器控制技術(shù),無位置傳感器位置信號(hào)檢測(cè)方法有 4 種:
1.反電勢(shì)法
該方法最成熟、最有效、也是最常見的方法。其基本原理是將檢測(cè)到的斷開相反電動(dòng)勢(shì)過零信號(hào)延時(shí) 30°電角度得到功率管的開關(guān)信號(hào)。由于電機(jī)靜止或電機(jī)轉(zhuǎn)速較低時(shí),反電勢(shì)信號(hào)沒有或較弱,因此反電動(dòng)勢(shì)法一般與“三段式”啟動(dòng)技術(shù)配套使用。
2.繼流二極管法
該方法通過檢測(cè)反并聯(lián)與逆變橋功率開關(guān)管上的繼流二極管的導(dǎo)通狀態(tài)來確定轉(zhuǎn)子的位置。
3.電感法
該方法通過檢測(cè)繞組電感隨轉(zhuǎn)子位置的改變而發(fā)生的變化,再通過一定的計(jì)算,可得到轉(zhuǎn)子的位置信號(hào)。
4.狀態(tài)觀測(cè)器法
該方法是將電機(jī)的三相電壓、電流作坐標(biāo),在派克方程的基礎(chǔ)上估算出電機(jī)的轉(zhuǎn)子位置。有于坐標(biāo)變換只考慮基波分量,該方法主要用于正弦波反電動(dòng)勢(shì)的PMBLDCM。
(1)轉(zhuǎn)矩脈動(dòng)抑制
永磁無刷直流電動(dòng)機(jī)在理想情況運(yùn)行時(shí)應(yīng)滿足:三相繞組完全對(duì)稱,氣隙磁場(chǎng)為方波,定子電流為方波,反電動(dòng)勢(shì)為梯形波,且在每半個(gè)周期內(nèi),方波電流持續(xù)時(shí)間為 120°電角度,梯形波反電勢(shì)平頂部分也為 120°電角度,兩者嚴(yán)格同步,此時(shí)電機(jī)將產(chǎn)生恒定的電磁轉(zhuǎn)矩。但在實(shí)際運(yùn)行中,電機(jī)總存在轉(zhuǎn)矩脈動(dòng),產(chǎn)生轉(zhuǎn)矩脈動(dòng)的原因和抑制方法有以下幾種:
a)電磁因素產(chǎn)生的轉(zhuǎn)矩脈動(dòng)。
該類型的轉(zhuǎn)矩脈動(dòng)是由于定子電流和轉(zhuǎn)子磁場(chǎng)的相互作用而產(chǎn)生的。
抑制方法有:電機(jī)優(yōu)化設(shè)計(jì)法、最佳開通角法、諧波消去法和轉(zhuǎn)矩閉環(huán)控制法。
b)電流換向引起的轉(zhuǎn)矩脈動(dòng)。
該類型的轉(zhuǎn)矩脈動(dòng)是由于電機(jī)繞組電感阻礙了電流的瞬時(shí)變化,因而在電樞電流從某一相切換到另一相時(shí)就會(huì)引起轉(zhuǎn)矩脈動(dòng)。抑制方法有:電流反饋法、重疊換向法和 PWM 斬波法。
c)齒槽引起的轉(zhuǎn)矩脈動(dòng)。
該類型的轉(zhuǎn)矩脈動(dòng)是由永磁體磁場(chǎng)和定子鐵心的齒槽作用在圓周方向產(chǎn)生的轉(zhuǎn)矩,又可稱為定位轉(zhuǎn)矩或磁阻轉(zhuǎn)矩。抑制齒槽轉(zhuǎn)矩的方法有:磁性槽楔法和閉口槽法、輔助槽法、輔助齒法和分?jǐn)?shù)槽法、斜槽法和斜極法。
(2)弱磁擴(kuò)速
由于永磁體的勵(lì)磁恒定不變,電機(jī)在基速以下采用 PWM 調(diào)制實(shí)現(xiàn)調(diào)壓調(diào)速,此時(shí)電機(jī)的反電勢(shì)與轉(zhuǎn)速、氣隙磁通成正比。
基速及基速以上運(yùn)行時(shí)端電壓已調(diào)至最大,隨著轉(zhuǎn)速的升高,電機(jī)反電勢(shì)增大,電樞電流減小。當(dāng)反電勢(shì)等于端電壓時(shí),電樞電流為零,無法產(chǎn)生電磁轉(zhuǎn)矩,電機(jī)將停轉(zhuǎn)。
為了在基速以上端電壓不變的條件下保持一定的電樞電流,以產(chǎn)生電磁轉(zhuǎn)矩,要實(shí)行弱磁控制,而對(duì)方波無刷直流電機(jī)而言,傳統(tǒng)的弱磁控制不能直接使用,需要新的控制策略。
一般通過提前開通功率器件,使得繞組的變壓器反電勢(shì)抵消一部分旋轉(zhuǎn)反電勢(shì),從而滿足電壓平衡關(guān)系,實(shí)現(xiàn)等效的弱磁控制。目前恒功率弱磁調(diào)速范圍為基速的 2.8 倍左右。
調(diào)速方式有:
1)脈寬調(diào)制(PWM);Pulse WidthModulation 頻率不變,脈寬可變。
2)頻率調(diào)制;脈寬不變,頻率可變。
3)限流控制方式。脈寬、頻率可變。如圖23 所示。
輪轂電機(jī)的應(yīng)用前景
能源和環(huán)境問題凸顯,電動(dòng)汽車成為世界各國汽車行業(yè)的戰(zhàn)略重點(diǎn),高品質(zhì)的輪轂電機(jī)及其控制系統(tǒng)是國內(nèi)外電氣工程領(lǐng)域的重要研究方向和熱點(diǎn),因其具有明顯的優(yōu)勢(shì),已成為電動(dòng)汽車發(fā)展的一個(gè)重要發(fā)展方向。
目前,輪轂電機(jī)已在電動(dòng)汽車上取得成功,可以預(yù)見,隨著研發(fā)的不斷深入,輪轂電機(jī)性能的不斷提高,以及電池技術(shù)、動(dòng)力控制系統(tǒng)和整車能源管理系統(tǒng)等相關(guān)技術(shù)的突破,輪轂電機(jī)將在電動(dòng)汽車上廣泛應(yīng)用。
新能源汽車市場(chǎng)在國家政策的推動(dòng)下,獲得了飛速發(fā)展。數(shù)據(jù)顯示,今年前10個(gè)月,新能源汽車銷售33.7萬輛,比上年同期增長(zhǎng)82.2%。
其中純電動(dòng)汽車銷售完成25.8萬輛,比上年同期增長(zhǎng)102.5%。隨著新能源汽車的火熱發(fā)展,與新能源汽車相關(guān)的零部件技術(shù)得到廣泛關(guān)注,大量資金涌入該領(lǐng)域。
在風(fēng)靡全球的新能源浪潮中,新能源汽車動(dòng)力系統(tǒng)發(fā)展可以分為三個(gè)階段,第一代是中央電機(jī)集中驅(qū)動(dòng)技術(shù),第二代是輪邊電機(jī)技術(shù),第三代是輪轂電機(jī)技術(shù)。
與前兩代技術(shù)相比,輪轂電機(jī)技術(shù)具有更加高效、節(jié)能、輕量化、小型化等諸多優(yōu)點(diǎn),能有效解決新能源汽車成本、能耗等問題,是未來的應(yīng)用趨勢(shì)。
基于此,有行業(yè)人士認(rèn)為,輪轂電機(jī)堪稱純電動(dòng)汽車的終極解決方案,這種技術(shù)使汽車由中央式驅(qū)動(dòng)改為分布式驅(qū)動(dòng),省掉變速器、傳動(dòng)軸、差速器等傳動(dòng)部件,將動(dòng)力、傳動(dòng)和制動(dòng)裝置整合到輪轂內(nèi),實(shí)現(xiàn)了新能源汽車發(fā)動(dòng)機(jī)、變速機(jī)的一體化,從機(jī)械驅(qū)動(dòng)轉(zhuǎn)為電驅(qū)動(dòng)。這如同喬布斯認(rèn)為點(diǎn)擊屏幕一定要用手指,而不是用觸屏筆一樣,是最直接、最高效的驅(qū)動(dòng)方式。
責(zé)任編輯:彭菁
-
電機(jī)
+關(guān)注
關(guān)注
142文章
9021瀏覽量
145502 -
功率器件
+關(guān)注
關(guān)注
41文章
1770瀏覽量
90442 -
輪轂電機(jī)
+關(guān)注
關(guān)注
3文章
54瀏覽量
13469
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
新能源純電動(dòng)汽車輪轂電機(jī)的優(yōu)點(diǎn)和缺點(diǎn)
汽車輪轂電機(jī)的原理和優(yōu)點(diǎn)
【設(shè)計(jì)技巧】輪轂電機(jī)驅(qū)動(dòng)技術(shù)
什么是輪轂電機(jī)技術(shù)?輪轂電機(jī)有哪些優(yōu)點(diǎn)及缺點(diǎn)?
輪轂電機(jī)的原理與結(jié)構(gòu)
輪轂電機(jī)的優(yōu)缺點(diǎn)
輪轂電機(jī)的結(jié)構(gòu)形式與主要分類
輪轂電機(jī)溫度場(chǎng)計(jì)算
輪轂電機(jī)的原理與結(jié)構(gòu)
輪轂電機(jī)和中置電機(jī)哪個(gè)好
輪轂電機(jī)的結(jié)構(gòu)、控制技術(shù)及應(yīng)用前景
輪轂電機(jī)與中置電機(jī):哪個(gè)更省電?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論