 我訓練了一個模型,讓開發板認識自己
我訓練了一個模型,讓開發板認識自己
認識自己,是人類的終極問題;而讓AI認識自己,則是人工智能覺醒的第一步。為此,國內知名嵌入式教育專家韋東山老師團隊使用做了個有趣的事情——讓開發板可以“認識”自己。
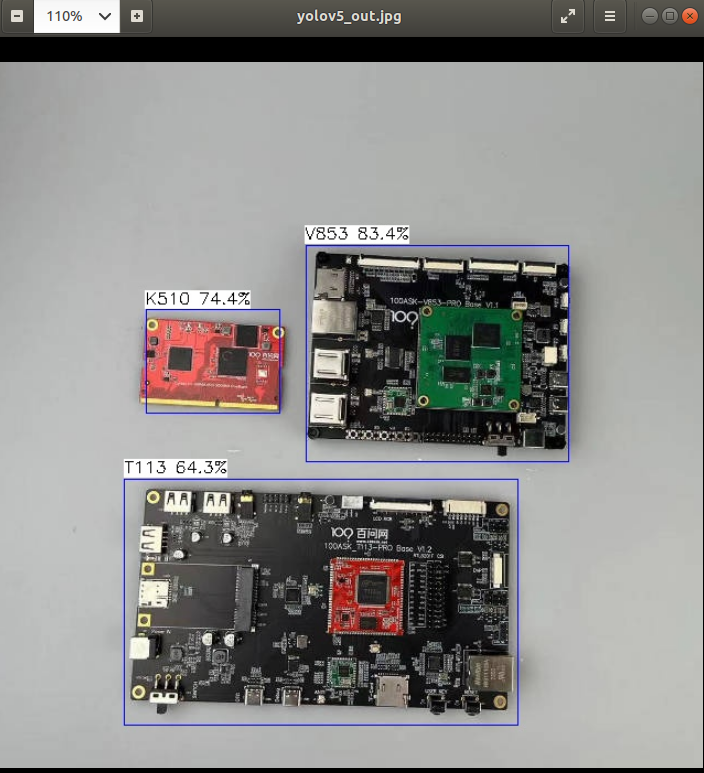
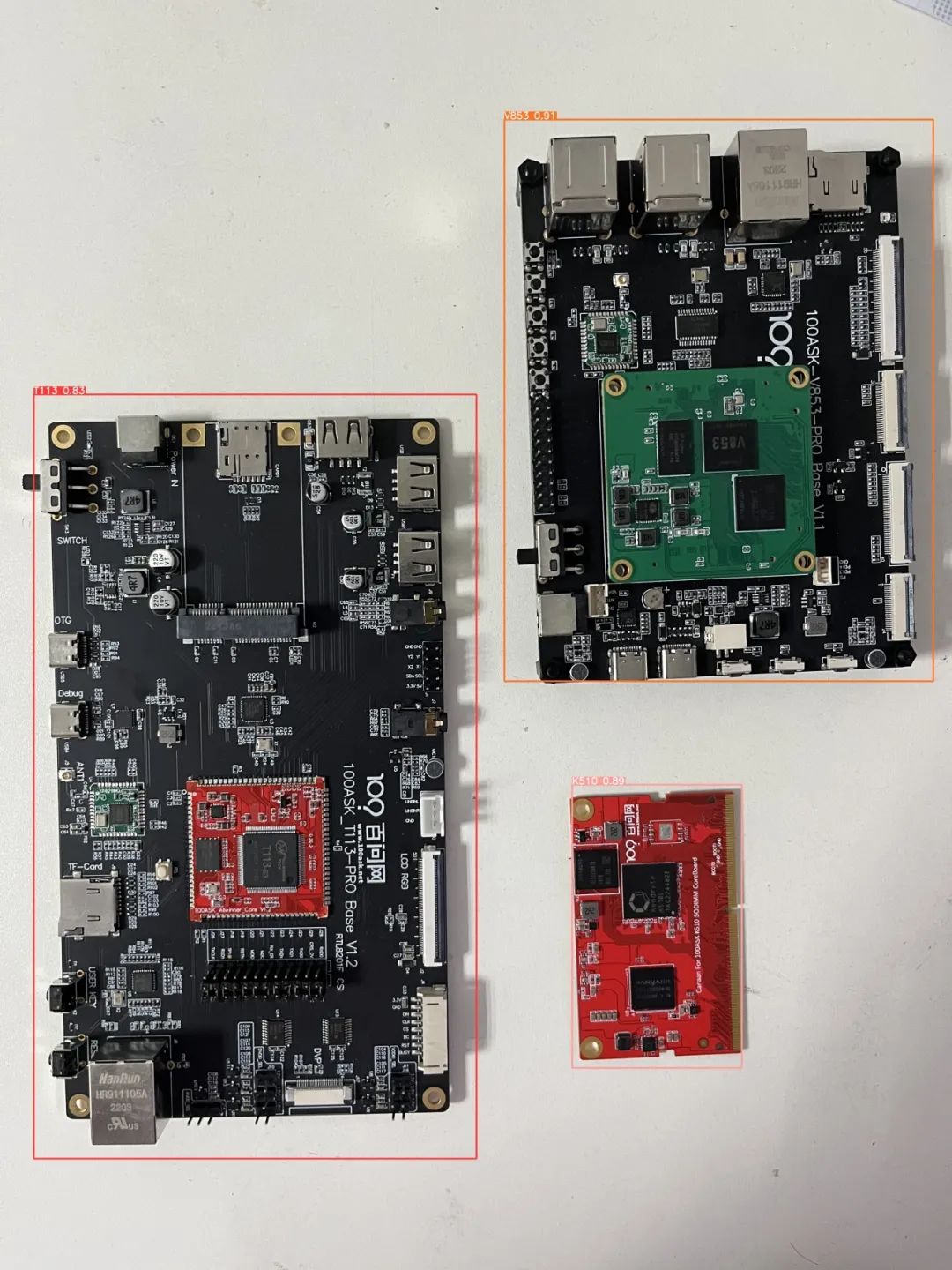
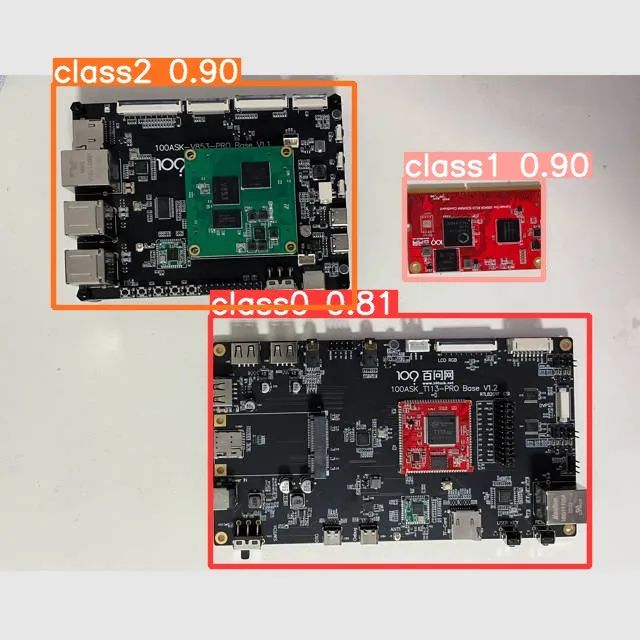
本文將從數據集的標注開始,進行在100ASK_V853-PRO開發板上部署YOLOV5自訓練模型的全過程演示,內容包括訓練自定義模型、導出模型、轉換模型、模型部署......并在最終實現開發板以自我為目標的檢測功能,下面展示“我看我自己”的展示端側最終檢驗效果圖:
下載數據標注工具
首先來到數據標注工具下載的地方。
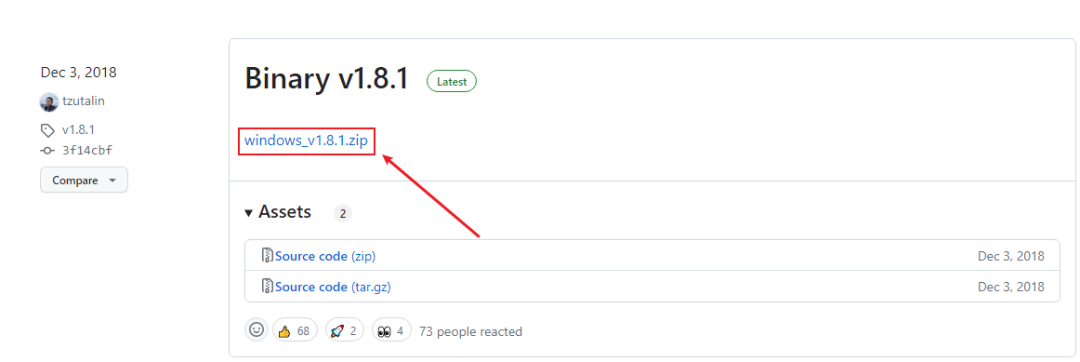
點擊上述紅框下載,下載完成后解壓壓縮包,雙擊打開labelImg.exe文件。

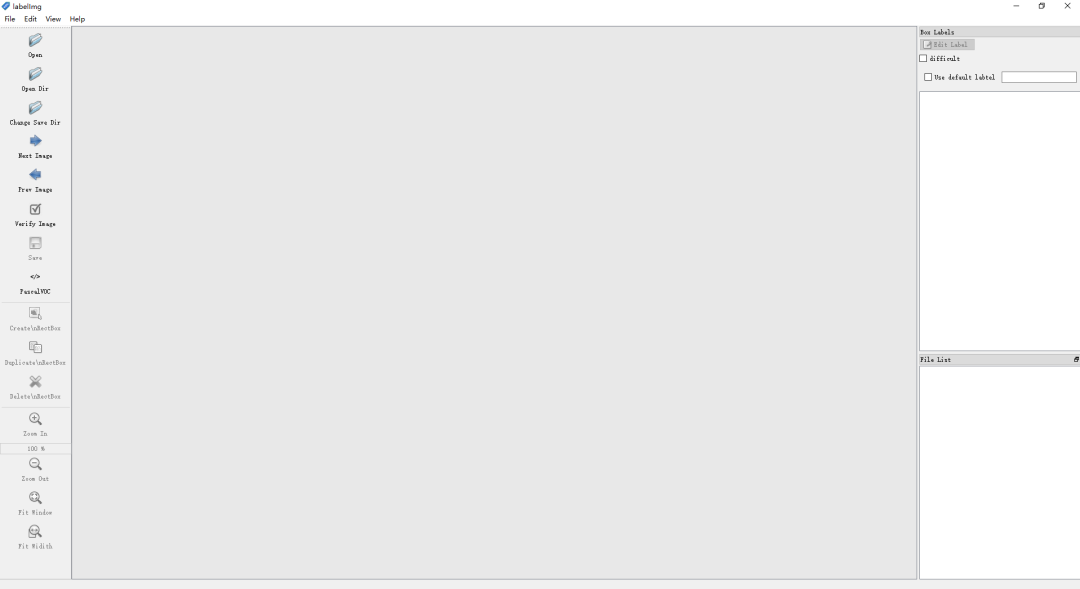
打開后等待運行,運行完成后會進入如下標注工作界面。
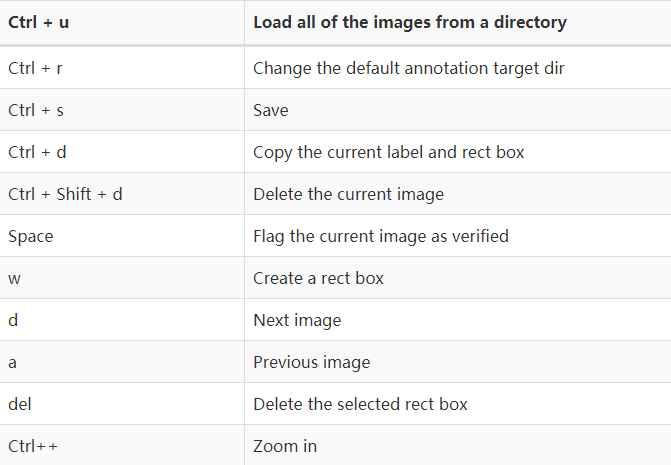
關于LabelImg更多的使用方法,請訪問:https://github.com/heartexlabs/labelImg
由于LabelImg會預先提供一些類供您使用,需要手動刪除這些類,使得您可以標注自己的數據集。步驟如下所示:
進入LabelImg程序目錄中的data目錄中,打開predefined_classes.txt文件,刪除文件中所有預定義的類后保存并退出即可。
創建數據集目錄
在任意工作目錄中創建images文件夾和labels文件夾分別存放圖像數據集和標注信息。這里我演示僅使用少量圖像樣本進行標注,在實際項目中需要采集足夠的圖像進行標注才拿滿足模型的準確率和精度。
例如我在100ask-yolov5-image目錄中創建有images文件夾和labels文件夾,如下所示,創建images文件,存放圖像數據集,創建labels文件夾,該文件夾用于后續存放標注數據。
標注圖像
打開LabelImg軟件后,使用軟件打開數據集圖像文件夾,如下所示:
打開后,修改輸出label的文件夾為我們創建的數據集目錄下的labels文件夾
下面我演示標注過程,以百問網的開發板為例,標注三塊開發板,當你點擊Save后即表示標注完成,標注完成后后會在labels目錄下生成classes.txt(類別)和圖像中標注的類別即位置信息。
經過標注大量的圖像后,labels文件夾如下圖所示:
劃分訓練集和驗證集
在模型訓練中,需要有訓練集和驗證集。可以簡單理解為網絡使用訓練集去訓練,訓練出來的網絡使用驗證集驗證。在總數據集中訓練集通常應占80%,驗證集應占20%。所以將我們標注的數據集按比例進行分配。
在yolov5-6.0項目目錄下創建100ask文件夾(該文件夾名可自定義),在100ask文件夾中創建train文件夾(存放訓練集)和創建val文件夾(存放驗證集)。
在train文件夾中創建images文件夾和labels文件夾。其中images文件夾存放總數據集的80%的圖像文件,labels文件夾存放與images中的文件對應的標注文件。
在val文件夾中創建images文件夾和labels文件夾。其中images文件夾存放總數據集的20%的圖像文件,labels文件夾存放與images中的文件對應的標注文件。
創建數據集配置文件
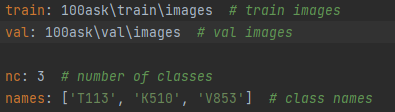
進入yolov5-6.0data目錄下,創建data.yaml,文件內容如下所示:
train: 100ask rainimages # train images val: 100askvalimages # val images nc: 3 # number of classes names: ['T113', 'K510', 'V853'] # class names
創建模型配置文件
進入models目錄下,拷貝yolov5s.yaml文件,粘貼并models目錄下重命名為100ask_my-model.yaml,例如:
修改100ask_my-model.yaml中類的數目為自己訓練模型的類數目。

修改訓練函數
打開yolov5-6.0項目文件夾中的train.py,修改數據配置文件路徑,如下圖紅框所示:
printf("hel parser.add_argument('--cfg', type=str, default='models/100ask_my-model.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default=ROOT / 'data/data.yaml', help='dataset.yaml path')lo world!");
訓練模型
在conda終端的激活yolov5環境,激活后進入yolov5-6.0項目文件夾。執行python train.py,如下圖所示:
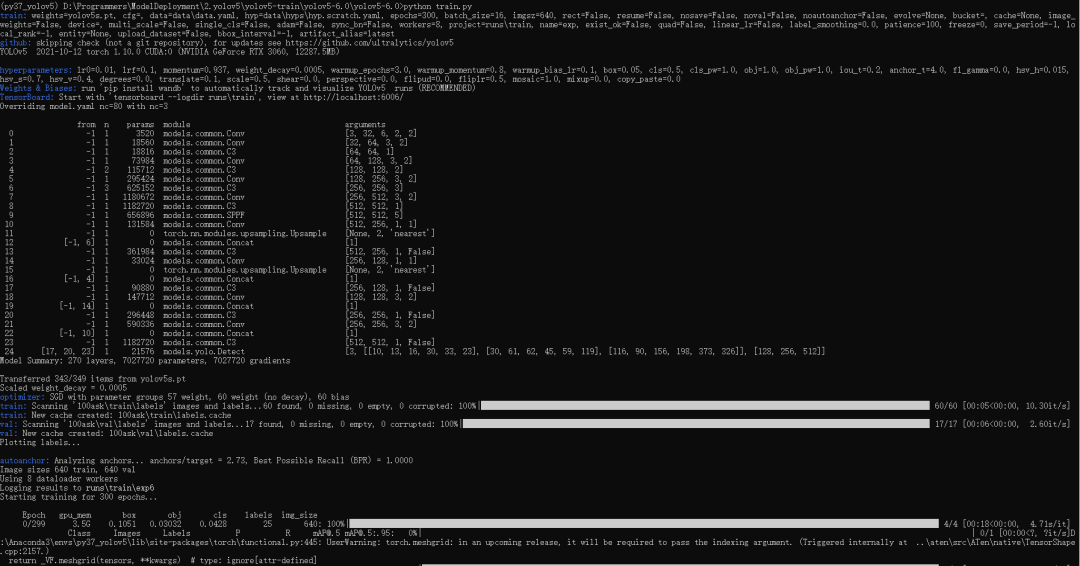
程序默認迭代300次,等待訓練完成...
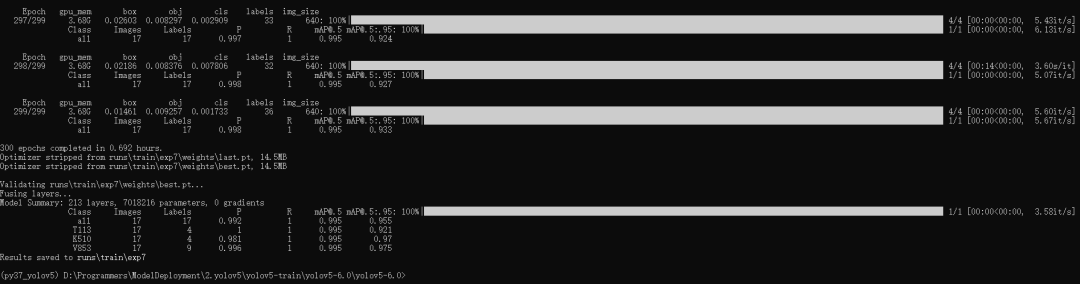
訓練完成后結果會保存在runs rain目錄下最新一次的訓練結果,如上圖所示,此次訓練的最好模型和最后訓練的模型保存在以下目錄中
runs rainexp7weights
驗證模型
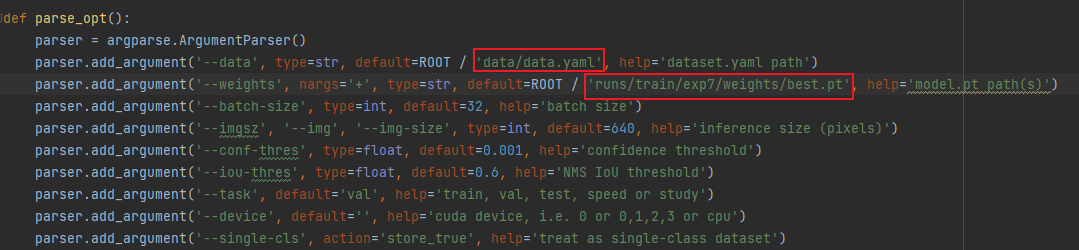
修改val.py函數,修改如下
parser.add_argument('--data', type=str, default=ROOT / 'data/data.yaml', help='dataset.yaml path')
parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'runs/train/exp7/weights/best.pt', help='model.pt path(s)')
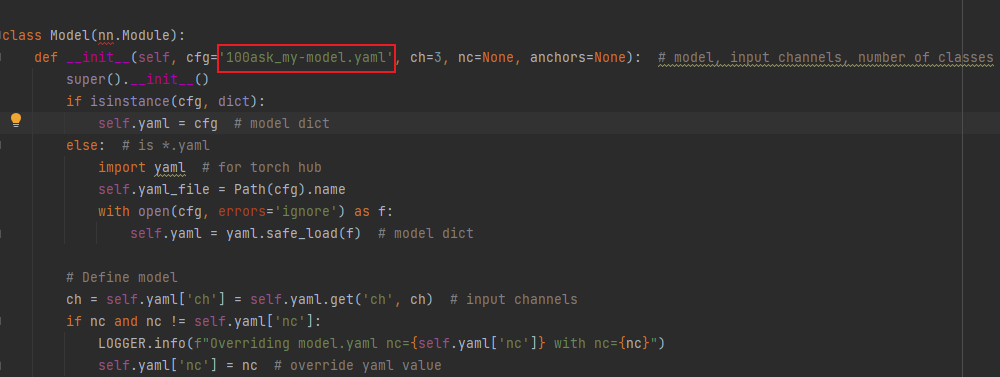
修改models文件夾下的yolo.py
class Model(nn.Module): def __init__(self, cfg='100ask_my-model.yaml', ch=3, nc=None, anchors=None): # model, input channels, number of classes
打開conda終端輸入python val.py

執行完成后的結果保存在runsvalexp文件下。
預測圖像
在data目錄中新建100ask-images文件夾存放待檢測的圖像和視頻文件。
修改detect.py函數中,模型的路徑與檢測圖像路徑。
parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'runs/train/exp7/weights/best.pt', help='model path(s)')
parser.add_argument('--source', type=str, default=ROOT / 'data/100ask-images', help='file/dir/URL/glob, 0 for webcam')

檢測效果如下圖所示:
導出ONNX模型
修改export.py函數
parser.add_argument('--data', type=str, default=ROOT / 'data/data.yaml', help='dataset.yaml path')
parser.add_argument('--weights', type=str, default=ROOT / 'runs/train/exp7/weights/best.pt', help='weights path')

在conda終端輸入:
printf("hello world!"); python export.py --include onnx --dynamic
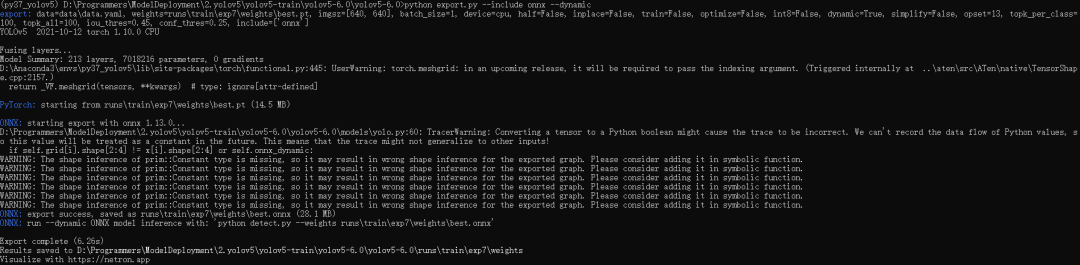
導出的模型會與輸入的模型位于同一路徑下,假設我輸入的模型位于:runs rainexp7weights
簡化模型
簡化模型前需要用到onnxruntime依賴包,輸入以下命令安裝:
pip install onnxruntime==1.13.1 -i https://pypi.doubanio.com/simple/
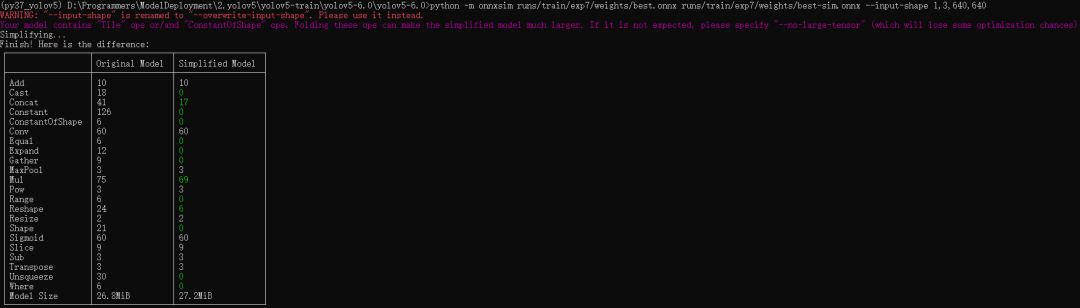
簡化命令如下:
python -m onnxsim <輸入模型> <輸出模型> --input-shape <輸入圖像尺寸>
例如輸入模型路徑為runs/train/exp7/weights/best.onnx,輸出模型路徑為runs/train/exp7/weights/best-sim.onnx,輸入圖像尺寸固定為640x640。
python -m onnxsim runs/train/exp7/weights/best.onnx runs/train/exp7/weights/best-sim.onnx --input-shape 1,3,640,640
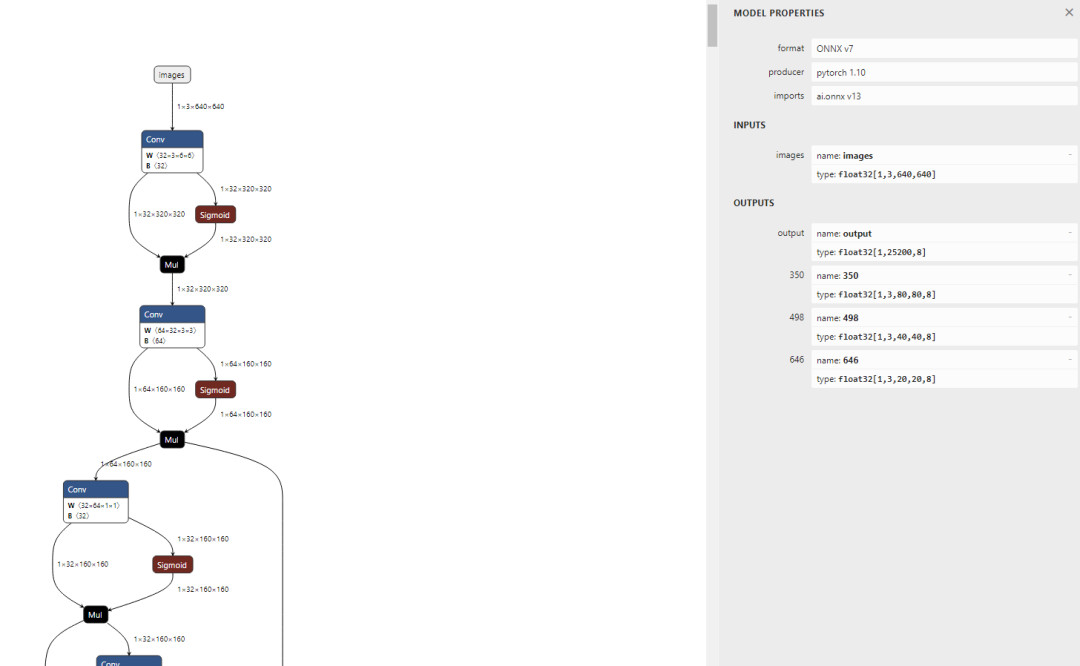
查看模型
可以看到輸入已經固定為640x640,可看到模型有 4 個輸出節點,其中 ouput 節點為后處理解析后的節點;在實際測試的過程中,發現 NPU 量化操作后對后處理的運算非常不友好,輸出數據偏差較大,所以我們可以將后處理部分放在 CPU 運行;因此在導入模型時保留 350,498, 646 三個后處理解析前的輸出節點即可。
驗證模型
模型需要修改為簡化后的模型路徑。
新建文件夾存放固定的輸入圖像尺寸。假設上述中我設置輸入圖像尺寸為640x640,那么此時我在data目錄下新建100ask-images-640文件夾存放640x640的圖像作為待測數據。
修改detect.py函數
parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'runs/train/exp7/weights/best-sim.onnx', help='model path(s)')
parser.add_argument('--source', type=str, default=ROOT / 'data/100ask-images-640', help='file/dir/URL/glob, 0 for webcam')

在conda終端輸入:
python detect.py

通過輸出信息可知:檢測結果存儲在runsdetectexp6,檢測結果如下:
轉換模型
將簡化后的best-sim.onnx模型傳入配置到NPU模型轉換工具的虛擬機中,創建模型工具目錄,包含模型文件,量化文件夾data(存放量化圖片),dataset.txt文件(存放量化圖片的路徑)。
buntu@ubuntu2004:~/100ask-yolov5-test$ tree . ├── best-sim.onnx ├── data │ └── test01.jpg └── dataset.txt 1 directory, 5 files
導入模型前需要知道我們要保留的輸出節點,由之前查看到我們輸出的三個后處理節點為:350,498,646 。
pegasus import onnx --model best-sim.onnx --output-data best-sim.data --output-model best-sim.json --outputs "350 498 646"
導入生成兩個文件,分別是是 yolov5s-sim.data 和 yolov5s-sim.json 文件,兩個文件是 YOLO V5 網絡對應的芯原內部格式表示文件,data 文件儲存權重,cfg 文件儲存模型。
YML 文件對網絡的輸入和輸出的超參數進行描述以及配置,這些參數包括,輸入輸出 tensor 的形狀,歸一化系數 (均值,零點),圖像格式,tensor 的輸出格式,后處理方式等等
pegasus generate inputmeta --model best-sim.json --input-meta-output best-sim_inputmeta.yml
pegasus generate postprocess-file --model best-sim.json --postprocess-file-output best-sim_postprocess_file.yml
修改 best-sim_inputmeta.yml 文件中的的 scale 參數為 0.0039216(1/255),目的是對輸入 tensor 進行歸一化,和網絡進行訓練的時候是對應的。
vi best-sim_inputmeta.yml
修改過程如下圖所示:
生成量化表文件,使用非對稱量化,uint8,修改 --batch-size 參數為你的 dataset.txt 里提供的圖片數量。如果原始網絡使用固定的batch_size,請使用固定的batch_size,如果原始網絡使用可變batch_size,請將此參數設置為1。
pegasus quantize --model best-sim.json --model-data best-sim.data --batch-size 1 --device CPU --with-input-meta best-sim_inputmeta.yml --rebuild --model-quantize best-sim.quantize --quantizer asymmetric_affine --qtype uint8
利用前文的量化表執行預推理,得到推理 tensor
pegasus inference --model best-sim.json --model-data best-sim.data --batch-size 1 --dtype quantized --model-quantize best-sim.quantize --device CPU --with-input-meta best-sim_inputmeta.yml --postprocess-file best-sim_postprocess_file.yml
輸出的模型可以在 ovxilb/100ask-best-sim_nbg_unify 文件夾中找到network_binary.nb模型文件。
pegasus export ovxlib --model best-sim.json --model-data best-sim.data --dtype quantized --model-quantize best-sim.quantize --batch-size 1 --save-fused-graph --target-ide-project 'linux64' --with-input-meta best-sim_inputmeta.yml --output-path ovxilb/100ask-best-sim/100ask-simprj --pack-nbg-unify --postprocess-file best-sim_postprocessmeta.yml --optimize "VIP9000PICO_PID0XEE" --viv-sdk ${VIV_SDK}
可以進入下圖所示目錄中將network_binary.nb模型文件拷貝出來備用。
端側部署
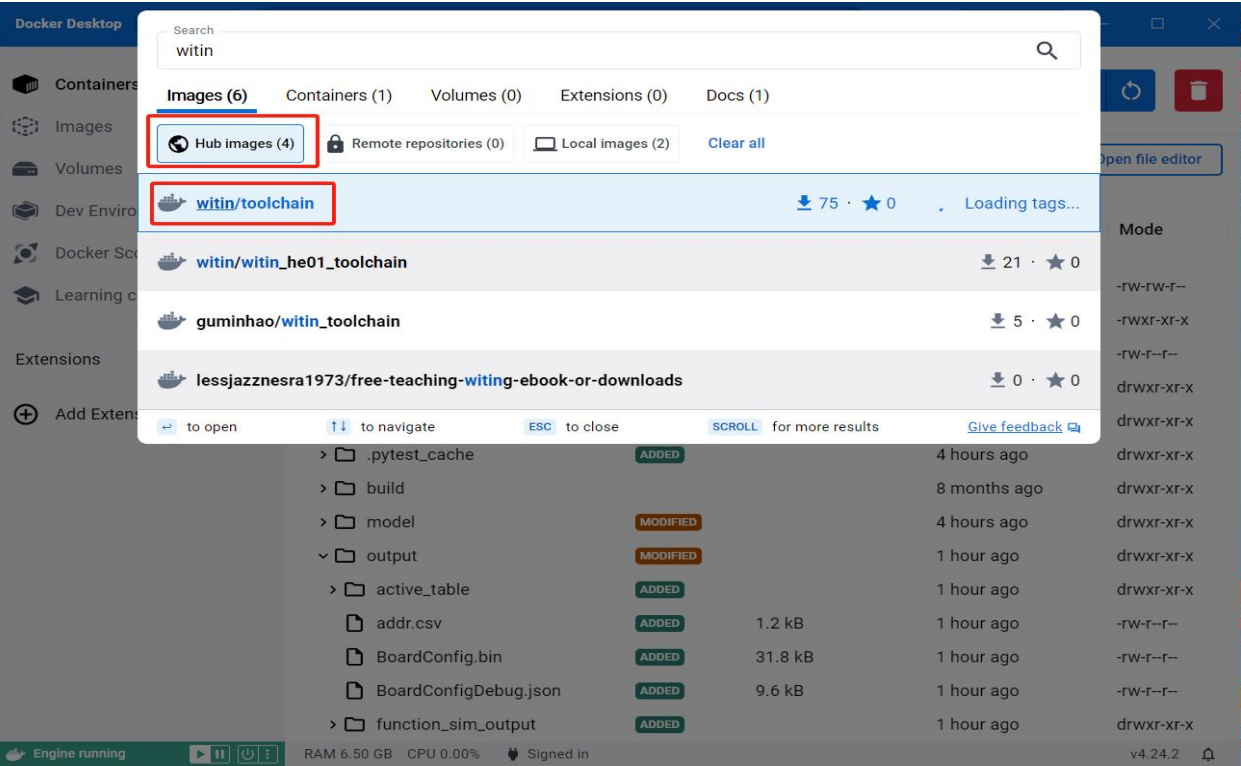
這里引用上一篇《100ASK-V853-PRO開發板支持yolov5模型部署》我們編寫的yolov5端側部署程序,這里進入端側部署程序文件夾中拷貝一份新程序進行修改。主要修改vnn_post_process.cpp程序。
修改draw_objects函數中的類名,這里我訓練的模型的類別分別是T113、K510、V853。
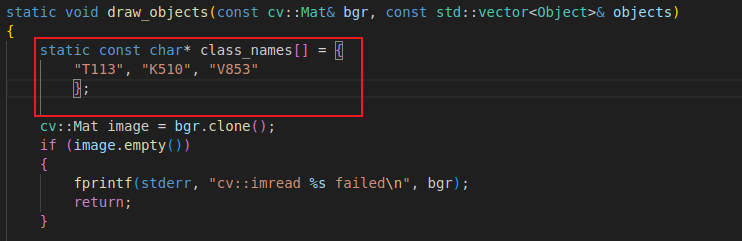
類別名稱需要yolov5-6.0項目data目錄下data.yaml對應。
修改generate_proposals函數中的類類別數量為您類別數量。假設我訓練的類別總共有T113、K510、V853,這3個類別,修改為3即可。
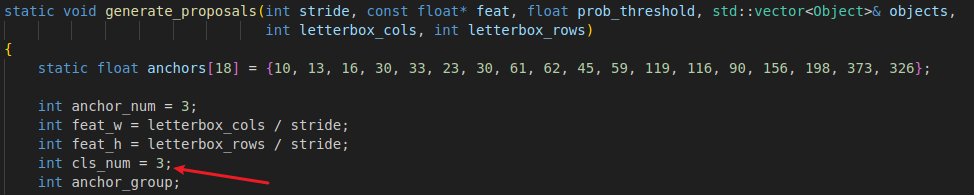
修改后的文件如下所示:
book@100ask:~/workspaces/tina-v853-open$ source build/envsetup.sh ... book@100ask:~/workspaces/tina-v853-open$ lunch ...1 ...
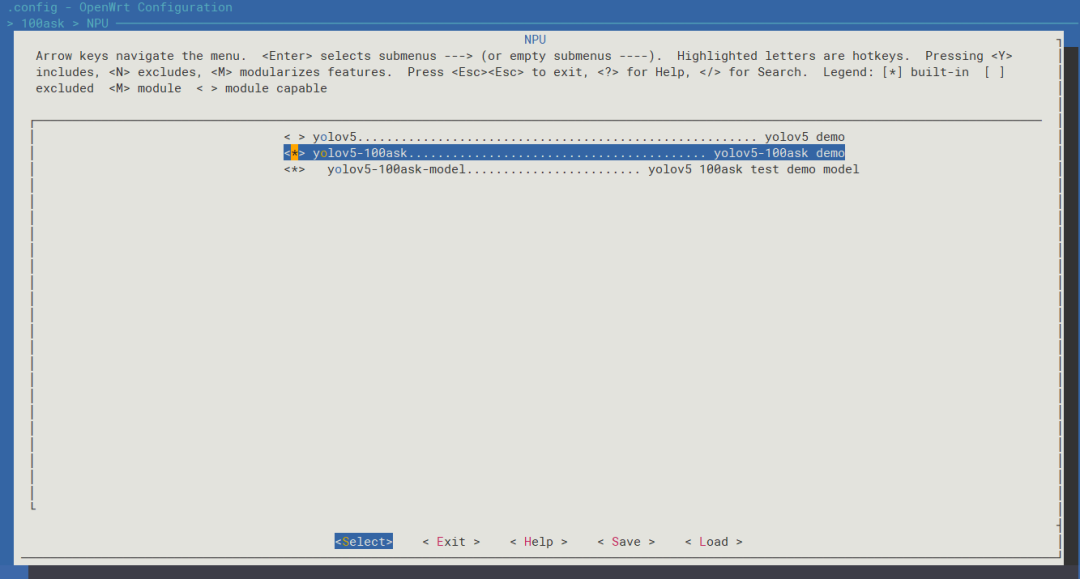
進入menuconfig,輸入
make menuconfig
進入如下目錄中,選中yolov5-100ask配置,
> 100ask > NPU <*> yolov5-100ask......................................... yolov5-100ask demo
編譯并生成鏡像
book@100ask:~/workspaces/tina-v853-open$ make ... book@100ask:~/workspaces/tina-v853-open$ pack
編譯完成后使用全志燒寫工具燒錄鏡像。
在主機端傳入640*640的圖像文件和network_binary.nb模型文件
book@100ask:~/workspaces/testImg$ adb push test-100ask.jpg /mnt/UDISK test-100ask.jpg: 1 file pushed. 0.6 MB/s (51039 bytes in 0.078s) book@100ask:~/workspaces/testImg$ adb push network_binary.nb /mnt/UDISK network_binary.nb: 1 file pushed. 0.7 MB/s (7409024 bytes in 10.043s)
開發板端進入/mnt/UDISK/目錄下
root@TinaLinux:/# cd /mnt/UDISK/ root@TinaLinux:/mnt/UDISK# ls lost+found network_binary.nb overlay test-100ask.jpg
運行yolov5檢測程序
yolov5-100ask network_binary.nb test-100ask.jpg
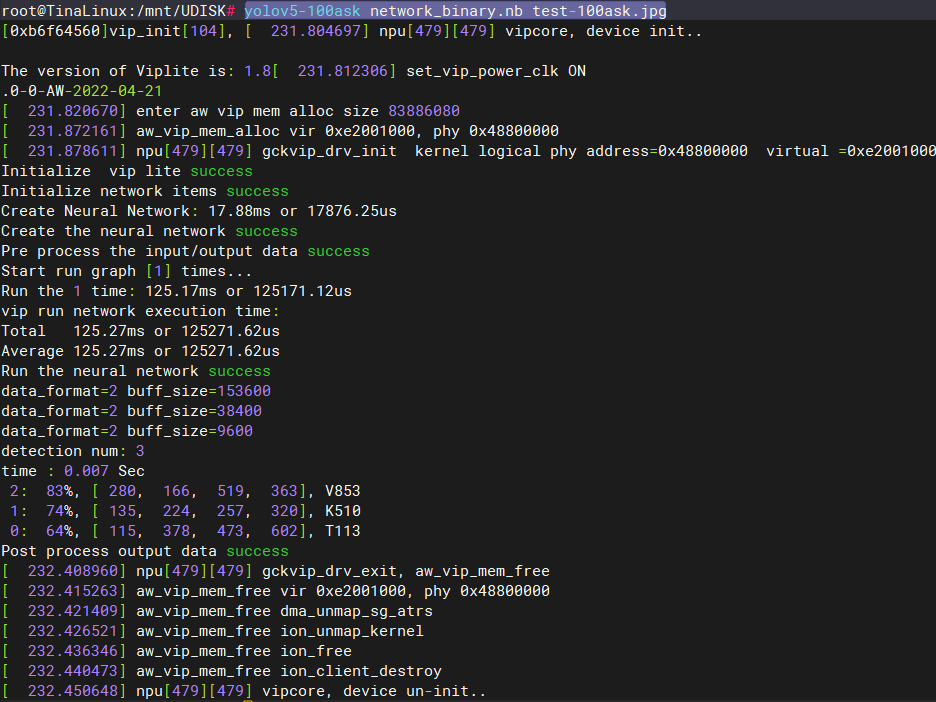
執行完成后會在當前目錄下生成輸出文件yolov5_out.jpg
root@TinaLinux:/mnt/UDISK# ls lost+found overlay yolov5_out.jpg network_binary.nb test-100ask.jpg
在主機端拉取開發板端的輸出圖像yolov5_out.jpg
book@100ask:~/workspaces/testImg$ adb pull /mnt/UDISK/yolov5_out.jpg ./ /mnt/UDISK/yolov5_out.jpg: 1 file pulled. 0.8 MB/s (98685 bytes in 0.116s)
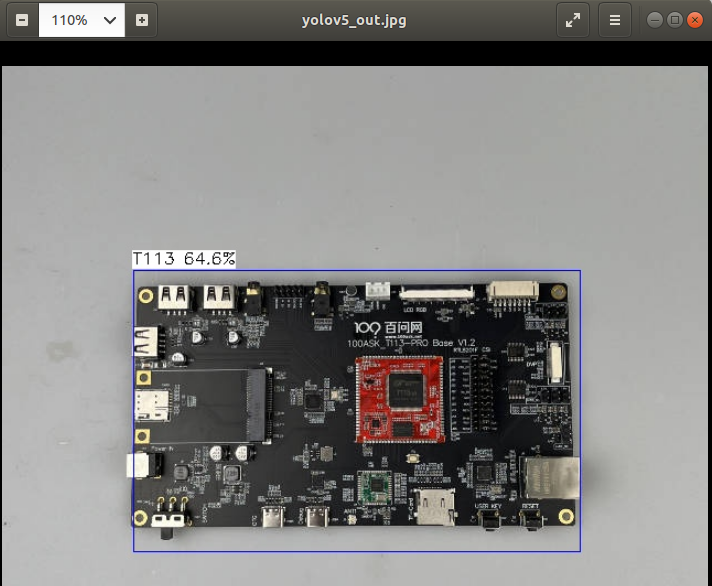
檢測效果圖
本文內容均轉載自百問科技
-
嵌入式
+關注
關注
5087文章
19150瀏覽量
306357 -
程序
+關注
關注
117文章
3793瀏覽量
81205 -
開發板
+關注
關注
25文章
5087瀏覽量
97785 -
模型
+關注
關注
1文章
3277瀏覽量
48957 -
數據集
+關注
關注
4文章
1208瀏覽量
24746
原文標題:我訓練了一個模型,讓開發板認識自己
文章出處:【微信號:gh_79acfa3aa3e3,微信公眾號:全志在線】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【基于存內計算芯片開發板驗證語音識別】訓練手冊
K210開發板部署到開發板上后,會提示“Out of Memory”無法完成檢測任務如何解決?
如何自己制作一個單片機開發板
谷歌訓練開發一個萬億參數的AI語言模型
利用ImageNet訓練了一個能降噪、超分和去雨的圖像預訓練模型
如何在U-Boot中添加自已的開發板

AI愛克斯開發板上使用OpenVINO加速YOLOv8目標檢測模型
【開源項目】手把手教你用全志XR32芯片DIY一個自己的開發板






 工商網監
工商網監
評論