 控制環設計方法及穩定性評價
控制環設計方法及穩定性評價
經典控制理論的特點是以輸入輸出特性(主要是傳遞函數)為系統數學模型,采用頻率響應法和根軌跡法這些圖解分析方法,分析系統性能和設計控制裝置。在實際操作中,確定控制參數也就是這兩個步驟,一是確定系統的開環傳遞函數,二是整定傳遞函數,得到控制參數。
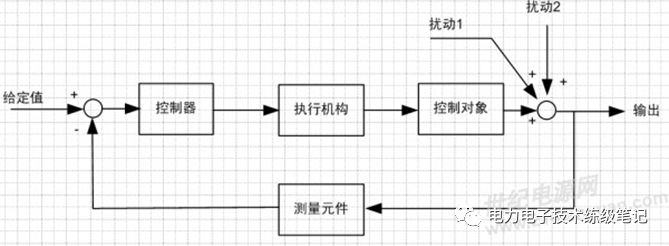
典型的反饋控制系統的框圖
在反饋控制系統中,控制器對被控對象施加的控制作用是取自被控量(即輸出量)的反饋信息,用來不斷地修正被控量與給定值之間的偏差,從而實現對被控對象進行控制任務,這就是反饋控制的原理。
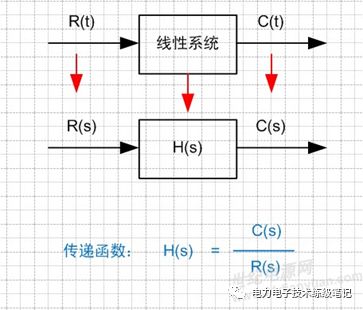
傳遞函數是在頻域里面研究系統特性。頻域里面,只需要幅值、頻率和相位三個信息就能完全確定一個正弦信號。閉環傳遞函數比較復雜,特點不鮮明,同時所有的控制都是負反饋,所以只要開環傳遞函數確定了,閉環傳遞函數的特性也唯一了。

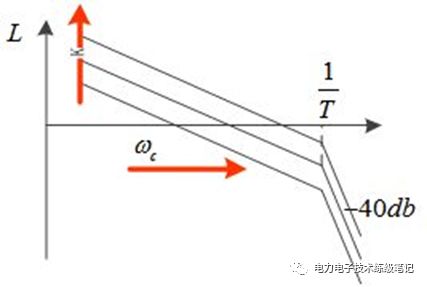
低頻增益就是頻率接近0時(直流分量),幅頻特性的縱坐標值,如下圖的藍色圈所示。這個值決定了閉環系統的穩態精度。對于低頻增益,我們希望越大越好,最好是無窮大。大家所熟知的積分環節,低頻增益就是無窮大,用于消除穩態誤差的。

高頻增益就是頻率比較高的增益,如下圖藍框所示。這一段增益決定了系統抗干擾的能力。大家所熟知的干擾都含有高頻成分。開環傳遞函數對高頻的增益越低,衰減就越大,就不會對系統造成太大的擾動。所以我們希望高頻段能快速降到0db一下,斜率越陡越好。

帶寬就是開環幅頻特性過0db所對應的頻率Wc,也叫截止頻率,如下圖藍框所示。截止頻率越高,代表系統響應速度越快。截止頻率以下,增益大于1,截止頻率以上,增益小于1。也就是說,截止頻率越高,系統能響應的信號頻率也就越高,當然響應速度也就越快了。

相角裕度指的是在截止頻率處,相頻特性對應的相角和-180度之間的距離。相角裕度決定了系統的穩定性。該值越大,系統越穩定。-180度是不穩定的點,這是因為-180度就相當于反向,乘以了-1,就把本身的負反饋變成了正反饋,系統就失穩了。或者可以這么理解閉環傳遞函數為G/(1+G),可能使分母為零的點是不穩定點,G=-1,必須同時滿足兩個條件:開環傳遞函數的相位為-180°,同時|G|=1。
上面講的都是用波特圖分析系統穩定性的一些基本概念。大家可能更關心的是知道了開環傳遞函數后怎么計算PI參數?這個有很多種辦法,下面介紹按照I型或者II型系統整定方法,需要指出的是,這只是工程中估計PI參數的一種,并非唯一方法。

首先說一下n型系統概念。對于開環傳遞函數,分母中有r個s,就是r型系統。0型系統,分母中沒有s,低頻增益是一個有限值,會有穩態誤差。3型及以上系統很難穩定,因為分母的一個s就是90度響應,多個s相角裕度很快就沒有了。所以常用的就是I型和II型系統。


典型I型系統
I型系統結構簡單,1+Ts為系統本身的一階慣性環節,只需要確定K值即可。該系統的缺點是,對斜坡和加速輸入跟蹤性能差。從bode圖上看,I型系統低頻增益無窮大,沒有穩態誤差。高頻以-40db斜率衰減,抗干擾能力強。截止頻率越高,相角裕度越小;截止頻率越低,相角裕度越大。
隨著K增大,截止頻率增大,增加了快速性;但降低了相角裕度和抗擾性。在配置中,通常取KT=0.5,來權衡快速性和穩定性。


典型II型系統
II型系統需要確定分子的兩個參數K和τ,分母的1+Ts為系統的一階慣性環節。II型系統對斜坡和加速輸入能無靜差跟蹤。是電力電子控制中最常用的。K和τ有眾多種組合,怎么來合理的確定它們呢?前人們針對II型系統有個中頻帶寬的概念,

確定了中頻寬h,就確定了τ,再改變K使得幅頻特性上下平移,改變ωc。
學者們發現,對于確定的h,存在一個確定的K,使得閉環幅頻特性峰值最小。K和h的關系為:

所以我們的工作就剩下,選擇合適的h就可以了。不同的h有什么影響呢?如下圖所示,h越小,階躍響應越快,但震蕩越多,超調越大;h越大,階躍響應越慢,但震蕩越小,超調越小。大家可以根據自己的需要,選擇不同的h來配置II型系統。

-
控制器
+關注
關注
112文章
16416瀏覽量
178761 -
正弦波
+關注
關注
11文章
647瀏覽量
55514 -
反饋控制系統
+關注
關注
0文章
12瀏覽量
2539
發布評論請先 登錄
相關推薦
【轉帖】電源環路穩定性評價指標和評價方法
怎么區分電動汽車操縱穩定性好壞?
電源環路穩定性評價方法
數字鎖相環提高鎖相穩定性的方法
提高數字鎖相環鎖相穩定性的方法
3個方法評價電源環路穩定性
怎樣去調試電源控制環穩定性呢
基于LabVIEW的車輛穩定性控制硬件在環系統

什么是電動汽車的操縱穩定性_如何評價電動汽車的操縱穩定性的好壞
電源控制環穩定性基礎理論與調試方法

如何權衡阻抗控制性能與穩定性的關系





 工商網監
工商網監
評論