") 四輪轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)及工作原理
四輪轉(zhuǎn)向系統(tǒng)結(jié)構(gòu)及工作原理
2.1.4WS 系統(tǒng)的組成
隨著二十世紀(jì)末以來在信息技術(shù)、集成電路、微電子領(lǐng)域的技術(shù)突破,以這些技術(shù)為基礎(chǔ)的汽車電子控制技術(shù)也逐步發(fā)展成熟,4WS系統(tǒng)的發(fā)展成熟也正是基于汽車電子控制技術(shù)的進(jìn)步,4WS系統(tǒng)中對于車輛四輪的控制以及前后輪的轉(zhuǎn)向分配使用到了電子控制技術(shù)以及電機(jī)助力技術(shù)。由于在車輛四輪轉(zhuǎn)向過程中,車輛的前輪和后輪在不同的速度之下的轉(zhuǎn)向方式存在差別,因此在四輪轉(zhuǎn)向控制之中應(yīng)用4WS結(jié)構(gòu)相對獨(dú)立,且在車輛前后輪轉(zhuǎn)向系統(tǒng)中不存在機(jī)械連接,因此可以確保轉(zhuǎn)向性能可以在系統(tǒng)正常運(yùn)行的狀態(tài)下保持高水平。
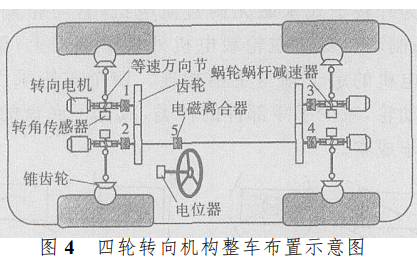
車輛轉(zhuǎn)向機(jī)構(gòu)、ECU、減速器、電動機(jī)、傳感器等部分共同構(gòu)成4WS系統(tǒng),并實現(xiàn)對車輛四輪轉(zhuǎn)向的有效控制。在車輛后輪參與轉(zhuǎn)向的過程中電子控制技術(shù)深度介入,幫助車輛后輪執(zhí)行正確的轉(zhuǎn)向工作,滿足車輛的正常行駛以及提升車輛的轉(zhuǎn)向性能。
2.2電子控制 4WS 系統(tǒng)的工作原理
ECU即電子控制單元,常被形象的稱為“行車電腦”,ECU是車輛電子控制系統(tǒng)內(nèi)執(zhí)行分析計算并向相應(yīng)部件輸出控制信號的單元,在4WS系統(tǒng)中ECU也承擔(dān)UI車輛運(yùn)動信號的分析和運(yùn)算,在車輛進(jìn)行四輪轉(zhuǎn)向時,位于車輛前輪的傳感器將車輛前輪的轉(zhuǎn)向信號以及車輛的運(yùn)動狀態(tài)傳入ECU,經(jīng)過ECU對該型號的處理、分析、運(yùn)算,產(chǎn)生輸送向步進(jìn)電機(jī)的驅(qū)動信號,步進(jìn)電機(jī)根據(jù)驅(qū)動信號執(zhí)行相應(yīng)的動作作用于車輛的后輪轉(zhuǎn)向機(jī)構(gòu),通過這個途徑控制后輪的轉(zhuǎn)向。ECU在此過程中仍然對車輛的運(yùn)動狀態(tài)進(jìn)行全程、實時的監(jiān)測,對車輛后輪轉(zhuǎn)向角與目標(biāo)轉(zhuǎn)向角之間的差值進(jìn)行計算,根據(jù)計算結(jié)果對后輪的轉(zhuǎn)角實現(xiàn)實時調(diào)整。這樣的實時調(diào)整與車輛的實際運(yùn)動狀態(tài)相契合,實現(xiàn)汽車的四輪轉(zhuǎn)向。
電子控制4WS系統(tǒng)設(shè)定有兩種轉(zhuǎn)向模式可供駕駛員選擇,駕駛員可以通過轉(zhuǎn)向模式開關(guān)選擇傳統(tǒng)的2WS模式也可以保持4WS狀態(tài)繼續(xù)行駛,設(shè)置這兩種轉(zhuǎn)向模式不僅是為駕駛員根據(jù)實際路況提供更多地選擇,也是當(dāng)4WS系統(tǒng)出現(xiàn)故障無法正常執(zhí)行四輪轉(zhuǎn)向時保留傳統(tǒng)的前輪轉(zhuǎn)向設(shè)置,保證車輛運(yùn)行的安全性,確保駕乘人員的人身安全。當(dāng)4WS系統(tǒng)出現(xiàn)故障時,駕駛室儀表臺上出現(xiàn)4WS故障指示燈,提醒駕駛員4WS系統(tǒng)出現(xiàn)故障,車輛四輪轉(zhuǎn)向系統(tǒng)不能正常運(yùn)行,檢測車輛運(yùn)行狀態(tài)的ECU實時記錄故障信息,方便技術(shù)人員在故障檢測維修時進(jìn)行檢碼。
上述的可以實現(xiàn)車輛前后輪同相位以及逆相位轉(zhuǎn)向的4WS系統(tǒng)屬于電子電動式四輪轉(zhuǎn)向系統(tǒng),這種系統(tǒng)的后輪轉(zhuǎn)向裝置是受車輛車速的控制,即車輛后輪的偏轉(zhuǎn)角度以及方向是根據(jù)車速的大小而改變的,同時后輪偏轉(zhuǎn)角和方向的變化也是對前輪轉(zhuǎn)角和橫擺角速度變化的響應(yīng)。在ECU中設(shè)定了車輛在不同速度下的四輪轉(zhuǎn)向控制策略,再車輛高速或者低速狀態(tài)下根據(jù)程序控制前后輪的轉(zhuǎn)向。當(dāng)ECU接收到傳感器發(fā)送來的車輛中高速行駛狀態(tài)的信號亦或是方向盤的小角度轉(zhuǎn)動的信號時,ECU根據(jù)控制策略程序控制車輛前后輪進(jìn)行同相位轉(zhuǎn)向,減小車輛的橫擺角速度,降低車輛車身的動態(tài)側(cè)偏,幫助車輛在高速行駛時保持操縱的穩(wěn)定性。當(dāng)ECU接收到傳感器發(fā)送來的低速行駛狀態(tài)或者是方向盤的大角度轉(zhuǎn)動信號時,ECU則采用低速運(yùn)行時的控制策略,程序控制前后輪實現(xiàn)逆相位轉(zhuǎn)向,車輛前輪轉(zhuǎn)角增大的同時增大后輪的偏轉(zhuǎn)角度,幫助車輛駕駛員輕松操縱低速車輛進(jìn)行轉(zhuǎn)向,并且降低車輛低速狀態(tài)下的轉(zhuǎn)彎半徑,提升車輛的靈活性。
-
汽車電子
+關(guān)注
關(guān)注
3026文章
7955瀏覽量
167046 -
電子控制
+關(guān)注
關(guān)注
1文章
69瀏覽量
21629 -
汽車
+關(guān)注
關(guān)注
13文章
3515瀏覽量
37318
發(fā)布評論請先 登錄
相關(guān)推薦
關(guān)于方向盤轉(zhuǎn)角與前輪轉(zhuǎn)向角的非線性關(guān)系
關(guān)于汽車轉(zhuǎn)向系統(tǒng)
如何用舵機(jī)控制前輪轉(zhuǎn)向,機(jī)械結(jié)構(gòu)是怎樣的?
如何做一個遙控轉(zhuǎn)向結(jié)構(gòu)?
分析汽車轉(zhuǎn)向電動機(jī)工作原理及轉(zhuǎn)向系統(tǒng)
汽車轉(zhuǎn)向系統(tǒng)具有哪些特性應(yīng)用?
四輪轉(zhuǎn)向控制(4WS),四輪轉(zhuǎn)向控制(4WS)是什么意思
主動前輪轉(zhuǎn)向控制技術(shù)研究

基于Kalman預(yù)測的四輪轉(zhuǎn)向狀態(tài)估計算法

基于ADAMS和MATLAB協(xié)同仿真的四輪轉(zhuǎn)向模糊控制策略研究_
電液控制全輪轉(zhuǎn)向系統(tǒng)
全方位線控四輪轉(zhuǎn)向電動汽車設(shè)計





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論