") Banana Pi BPI-FSM1819D 峰岹科技伺服電機(jī)驅(qū)動(dòng)控制器
Banana Pi BPI-FSM1819D 峰岹科技伺服電機(jī)驅(qū)動(dòng)控制器
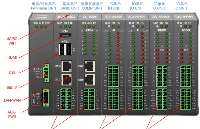
BPI-FSM8191D伺服電機(jī)控制器是香蕉派開源社區(qū)與峰岹科技合作打造的一款工業(yè)級(jí)伺服電機(jī)控制產(chǎn)品。是一款應(yīng)用于驅(qū)動(dòng)旋轉(zhuǎn)伺服電機(jī),直線伺服電機(jī)以及力矩電機(jī)的伺服模塊,在實(shí)際應(yīng)用中,由主控板與功率板組成,提供電機(jī)控制核心算法及各種通信功能。 BPI-FSM8191D伺服模塊主控板,配置兩個(gè)應(yīng)用端口和一個(gè)功率板接口,伺服模塊引腳包含了多個(gè)信號(hào)接口,能滿足大多數(shù)伺服功能的調(diào)試使用。在不同的應(yīng)用場(chǎng)景中,可定制伺服功率板,用于提供功率輸入輸出,電源供給以及能耗需求。功率板擁有豐滿的調(diào)試接口,完全滿足開發(fā)者不同功率,電源的需求。
應(yīng)用場(chǎng)景
新能源行業(yè):模切機(jī)、疊片機(jī)、切疊一體機(jī)、極耳焊接、包膜機(jī)、入殼機(jī)、頂蓋焊、氦檢機(jī)、注液機(jī)、化成柜、補(bǔ)液機(jī)、密封焊機(jī)、分容柜、Pack線等。
半導(dǎo)體行業(yè):清洗設(shè)備、***、刻蝕機(jī)、修復(fù)檢測(cè)設(shè)備、劃片機(jī)、晶圓探針測(cè)試設(shè)備、分選機(jī)、貼片機(jī)、邦定機(jī)等設(shè)備
新型顯示行業(yè):固晶機(jī)、返修機(jī)、點(diǎn)膠機(jī)、貼合設(shè)備、邦定設(shè)備、背光組裝設(shè)備、除泡設(shè)備、切割設(shè)備、AOI設(shè)備等基本全套工藝設(shè)備。
光學(xué)行業(yè):焊線機(jī)、調(diào)焦機(jī)、擺盤機(jī)、組立機(jī)、成像檢測(cè)等。
硬件規(guī)格
常見用模塊做成的伺服控制器電氣規(guī)格
| 伺服控制器電氣規(guī)格 | |||
| 項(xiàng)目 | 規(guī)格 | ||
| 功率電路輸入電源(L1,L2,L3) | 額定電壓(VAC線-線)±10% | 240 | |
| 頻率(Hz) | 50 | ||
| 240VAC | 單相/三相 | ||
| 控制電路輸入電源(L1C,L2C) | 240±10VAC | 單相 | |
| 邏輯輸入熔斷器(延時(shí)) | 240VAC(A) | 0.5 | |
| STO(安全轉(zhuǎn)矩切斷) | STP電源(VDC) | 24±10% | |
| STO熔斷器(延時(shí)) | 240VAC(A) | 1.5 | |
| 電機(jī)輸出(U,V,W) | 連續(xù)輸出電源(Arms) | 4.5 | |
| 連續(xù)輸出電源(Apeak) | 6.63 | ||
| 2秒內(nèi)峰值輸出電流(Arms) | 14 | ||
| 2秒內(nèi)峰值輸出電流(Apeak) | 20 | ||
| PWM頻率(kHz) | 16 | ||
| 軟啟動(dòng) | 最大浪涌電流(A) | 7 | |
| 最大充電時(shí)間(ms) | 250 | ||
| 跳閘電壓 | 欠電壓跳閘(額定)(VDC) | 50 | |
| 過電壓跳閘(VDC) | 420 | ||
| 過溫 | 功率板過溫故障溫度(溫度穩(wěn)定時(shí))(℃) | 100±5% | |
| 再生制動(dòng) | 內(nèi)部母線電容(uF) | ||
| VLOW(再生電路關(guān)閉)(VDC) | 380 (可設(shè)置) | ||
| VMAX(再生電路打開)(VDC) | 400 (可設(shè)置) |
伺服模塊控制規(guī)格
| 接口選項(xiàng):模擬電壓/脈沖指令/RS232控制規(guī)格 | |||
| 項(xiàng)目 | 規(guī)格 | 說明 | |
| 電機(jī) | 交流與直流 | 旋轉(zhuǎn)伺服電機(jī)、直線伺服電機(jī) | |
| 自動(dòng)配置 | 自動(dòng)配置電機(jī)相位及相線設(shè)置 | ||
| 運(yùn)行模式 | 可選擇的模式 | 轉(zhuǎn)矩控制、速度控制、位置控制 | |
| 轉(zhuǎn)矩控制 | 輸入指令/輸出指令 | 速度指令 / 電流指令 | |
| 性能 | 刷新頻率62.5us (16kHz) | ||
| 階躍響應(yīng)時(shí)間 | |||
| 控制方法 | DQ, PI | ||
| 參考指令 | 模擬±10VDC,串行RS232 | ||
| 自動(dòng)調(diào)整 | 手動(dòng)調(diào)整電流環(huán)參數(shù) | ||
| 速度控制 | 輸入指令/輸出指令 | 速度指令 / 電流指令 | |
| 性能 | 刷新頻率 125 μs (8 kHz) | ||
| 可選速度控制方法 | PI | ||
| 濾波器 | 一階低通濾波器、兩個(gè)級(jí)聯(lián)的一階低通濾波器 | ||
| 參考指令 | 模擬±10 VDC, 串行RS232 或 USB | ||
| 位置控制 | 輸入指令/輸出指令 | 位置指令/速度指令 | |
| 性能 | 刷新頻率250us(4kHz) | ||
| 控制方法 | PID及前饋 | ||
| 參考指令 | 帶電子傳動(dòng)的脈沖&方向,串行,串行RS232 | ||
| 狀態(tài)顯示 | 形式 | 7 段 LED (紅色), 顯示驅(qū)動(dòng)器狀態(tài)(報(bào)警、運(yùn)行、使能等) | |
| 電子齒輪 | 方法 | 用戶定義齒輪比 | |
| GUI | 用戶界面 | 基于 Windows串口軟件 | |
| 功能 | 設(shè)定連接、驅(qū)動(dòng)器信息、電源信息、電機(jī)、反饋、I/O 選擇/配置、運(yùn)動(dòng)設(shè)定/調(diào)整、故障歷史/狀態(tài)顯示等。 | ||
| 旋轉(zhuǎn)單位 | 位置 | 脈沖(Counts) | |
| 速度 | 轉(zhuǎn)每分 (rpm) | ||
| 加速度/減速度 | rps/s | ||
| 直線單位 | 位置 | 脈沖(Counts)、毫米(mm) | |
| 速度 | 毫米/秒(mm/s) | ||
| 加速度/減速度 | 毫米/秒 2(mm/s2) |
伺服模塊通信規(guī)格
| 通訊規(guī)格 | |||
| 項(xiàng)目 | 規(guī)格 | ||
| RS232 | 基于 modbus RTU | ||
| 波特率 19200 bit/s | |||
| 最大導(dǎo)線長(zhǎng)度 10 m | |||
| 高速串口 (專門用于觀測(cè)波形) | 基于 自定義協(xié)議 | ||
| 波特率 115200 - 750000 bit/s | |||
| 最大導(dǎo)線長(zhǎng)度 2m |
伺服模塊I/O規(guī)格
| 伺服模塊I/O規(guī)格 | |||
| 項(xiàng)目 | 規(guī)范 | 說明 | |
| 模擬輸入 | 電壓范圍 | 模擬 ±10 VDC 差分 | |
| 零衰減 | 100 Hz | ||
| 帶寬 (-3 dB) | 500 Hz | ||
| 脈沖 & 方向 | 信號(hào) | RS 422 線接收器 | |
| 最大輸入頻率 | 1.6 MHz (以后會(huì)加到5MHz) | ||
| 數(shù)字輸入(8 路) | 信號(hào) | 可配置、 光隔 、 漏極輸入。 | |
| (通用IO可配置相關(guān)引腳功能) | 電壓 | 24 V | |
| 最大輸入電流 | 10 mA | ||
| 傳送延時(shí)時(shí)間 | 1 ms | ||
| 數(shù)字輸出(6 路) | 信號(hào) | 可配置、 集電極開路、 光隔 、 漏極輸出。 | |
| (通用IO可配置相關(guān)引腳功能) | 電壓 | 24 V | |
| 最大電流 | 40 mA | ||
| 傳送延時(shí)時(shí)間 | 1 ms | ||
| 主要IO功能信號(hào) | 功能 | 說明 | |
| 輸入信號(hào)(端口可以配置) | 正向限位 | 正限位開關(guān) | |
| 負(fù)向限位 | 負(fù)限位開關(guān) | ||
| 回零點(diǎn)位 | 原點(diǎn)位開關(guān) | ||
| 電機(jī)使能 | 外部使能信號(hào) | ||
| 報(bào)警清除 | 外部清除報(bào)警信號(hào) | ||
| 速度限制 | 扭矩控制時(shí)的速度限制輸入 | ||
| 輸出信號(hào)(端口可以配置) | 伺服定位完成 | 伺服執(zhí)行定位完成信號(hào) | |
| 伺服停止 | 伺服執(zhí)行停止信號(hào) | ||
| 伺服報(bào)警 | 伺服錯(cuò)誤報(bào)警信號(hào) | ||
| 伺服剎車 | 伺服剎車控制信號(hào) | ||
| 伺服尋相完成 | 伺服尋相完成信號(hào) | ||
| 伺服回零完成 | 伺服回零完成信號(hào) |
伺服模塊支持電機(jī)反饋規(guī)格
| 支持的電機(jī)反饋規(guī)格 | |||
| 電機(jī)反饋 | 規(guī)格 | 說明 | |
| 綜述 | 驅(qū)動(dòng)器輸出電壓 | 5 VDC | |
| 驅(qū)動(dòng)器最大輸出電流 | 250 mA | ||
| 最大電纜長(zhǎng)度 | AWG 28 – 3 m; AWG 24 – 10 m | ||
| 增量式編碼器 | 信號(hào) | 有(或無(wú))零位/霍爾信號(hào)的 AB 正交信號(hào)編碼器差分輸出 | |
| AB 正交最大輸入頻率 | 1.6 MHz (正交前) (以后會(huì)加到5MHz) | ||
| 最小零位脈沖寬度 | 1 μs | ||
| 霍爾傳感器 | 信號(hào) | 單端型 | |
| 正弦編碼器(下一個(gè)版本會(huì)加上) | 信號(hào) | 正余弦差分, 帶或不帶霍爾 | |
| 信號(hào)電平 | 1 Vpp @ 2.5 V | ||
| 最大輸入頻率 | 270 kHz | ||
| 輸入阻抗 | 120 Ω | ||
| 插值 | 最大至16384 (14 位) | ||
| 有效插值 | 最大至 4096 (12 位) |
電機(jī)信號(hào)反饋線引腳定義
根據(jù)實(shí)際應(yīng)用中使用的反饋裝置類型進(jìn)行電機(jī)反饋接口的接線。具體參見下文的引腳出線表。 電機(jī)溫度傳感器使用12/25腳,已通過模塊內(nèi)部上拉到5V。
| 電機(jī)信號(hào)反饋線引腳定義 | |||||
| 接口引腳 | 模塊引腳 | 功能 | 接口引腳 | 模塊引腳 | 功能 |
| 1 | 97 | 增量編碼器A+ | 14 | 98 | 增量編碼器A- |
| SSI編碼器data+ | |||||
| 2 | 96 | 增量編碼器B+ | 15 | 95 | 增量編碼器B- |
| SSI編碼器clock+ | SSI編碼器clock- | ||||
| 3 | 93 | 增量編碼器Z+ | 16 | 94 | 增量編碼器Z- |
| 4 | 116 | 霍爾U+ | 17 | 115 | 霍爾V+ |
| 5 | 114 | 霍爾W+ | 18 | / | / |
| 6 | / | / | 19 | / | / |
| 7 | / | / | 20 | / | / |
| 8 | / | / | 21 | / | / |
| 9 | 111 | 正弦編碼器sine+ | 22 | 110 | 正弦編碼器sine- |
| 10 | 109 | 正弦編碼器cosine+ | 23 | 108 | 正弦編碼器cosine- |
| 11 | 3、4 | 5V電源 | 24 | 與模塊共地 | 地(5V回路) |
| 12 | 91 | 電機(jī)溫度傳感器 | 25 | 90 | 電機(jī)溫度傳感器 |
| 13 | 3、4 | 5V電源 | 26 | / | 屏蔽 |
伺服模塊I/O口引腳定義
數(shù)字/模擬量的輸入和輸出按您的應(yīng)用的要求來(lái)接線。為了保持?jǐn)?shù)字I/O的隔離,您的24V回路的地接到引腳1和引腳19,驅(qū)動(dòng)數(shù)字輸入引腳,需要您提供一個(gè)24V信號(hào)。
| 伺服模塊I/O口引腳定義 | |||||||
| 接口引腳 | 模塊引腳 | 功能 | 說明 | 接口引腳 | 模塊引腳 | 功能 | 說明 |
| 1 | 64 | 數(shù)字輸入的公共地 | 用戶提供24V輸入信號(hào)的地 | 19 | 72 | 數(shù)字輸出的公共地 | 用戶提供24V上拉的地 |
| 2 | 107 | 等效編碼器輸出Z+ | 等效編碼器輸出的信號(hào)Z正向 | 20 | 84 | RS485通訊輸入- | RS485通訊輸入-(或者B端) |
| 3 | / | / | 21 | 83 | 485輸入+ | RS485通訊輸入+(或者A端) | |
| 4 | 106 | 等效編碼器輸出Z- | 等效編碼器輸出的信號(hào)Z負(fù)向 | 22 | 73 | 數(shù)字量輸入8 | 光隔離可編程數(shù)字輸入8 |
| 5 | 104 | 等效編碼器輸出B+ | 等效編碼器輸出的信號(hào)B正向 | 23 | 74 | 數(shù)字量輸入7 | 光隔離可編程數(shù)字輸入7 |
| 6 | / | / | 24 | 75 | 數(shù)字量輸入6 | 光隔離可編程數(shù)字輸入6 | |
| 7 | 105 | 等效編碼器輸出B- | 等效編碼器輸出的信號(hào)B負(fù)向 | 25 | 與模塊共地 | 數(shù)字地 | 數(shù)字地 |
| 8 | 112 | 模擬輸入量AN+ | 差分模擬量指令輸入的正向 | 26 | 76 | 數(shù)字量輸入5 | 光隔離可編程數(shù)字輸入5 |
| 9 | 103 | 等效編碼器輸出A- | 等效編碼器輸出的信號(hào)A負(fù)向 | 27 | 77 | 數(shù)字量輸入4 | 光隔離可編程數(shù)字輸入4 |
| 10 | 與模塊共地 | 數(shù)字地 | 數(shù)字地 | 28 | 78 | 數(shù)字量輸入3 | 光隔離可編程數(shù)字輸入3 |
| 11 | 102 | 等效編碼器輸出A+ | 等效編碼器輸出的信號(hào)A正向 | 29 | 與模塊共地 | 數(shù)字地 | 數(shù)字地 |
| 12 | 113 | 模擬輸入量AN- | 差分模擬量指令輸入的負(fù)向 | 30 | 68 | 數(shù)字量輸出3 | 光隔離可編程數(shù)字輸出,可用OUT3讀取 |
| 13 | 與模塊共地 | 數(shù)字地 | 數(shù)字地 | 31 | 65 | 數(shù)字量輸出6 | 光隔離可編程數(shù)字輸出,可用OUT6讀取 |
| 14 | 87 | 方向輸入- | 方向輸入的負(fù)向 | 32 | 69 | 數(shù)字量輸出2 | 光隔離可編程數(shù)字輸出,可用OUT2讀取 |
| 15 | 79 | 數(shù)字量輸入2 | 快速光隔離可編程數(shù)字輸入,用IN2讀取 | 33 | 80 | 數(shù)字量輸入1 | 快速光隔離可編程數(shù)字輸入,用IN1讀取 |
| 16 | 86 | 方向輸入+ | 方向輸入的正向 | 34 | 70 | 數(shù)字量輸出1 | 光隔離可編程數(shù)字輸出,可用OUT1讀取 |
| 17 | 89 | 脈沖輸入+ | 脈沖輸入的正向 | 35 | 66 | 數(shù)字量輸出5 | 光隔離可編程數(shù)字輸出,可用OUT5讀取 |
| 18 | 88 | 脈沖輸入- | 脈沖輸入的負(fù)向 | 36 | 67 | 數(shù)字量輸出4 | 光隔離可編程數(shù)字輸出,可用OUT4讀取 |
伺服模塊保護(hù)功能及使用環(huán)境要求
| 保護(hù)功能及使用環(huán)境要求 | |||
| 項(xiàng)目 | 規(guī)格 | ||
| 保護(hù)功能 | 過流、欠壓和過壓、過溫、反饋缺失、STO 信號(hào)未連接、位置跟隨錯(cuò)誤、速度過超、參數(shù)錯(cuò)誤等。 | ||
| 防飛車保護(hù)功能 | 電機(jī)在尋相時(shí),屏蔽外部脈沖輸入信號(hào)功能(脈沖&方向)與接收運(yùn)動(dòng)指令功能(RS232),防止電機(jī)發(fā)生飛車事故。 |
開發(fā)
驅(qū)動(dòng)器安裝
安裝概述
按以下步驟完成驅(qū)動(dòng)器模塊的安裝及設(shè)定。
1.根據(jù)需要的運(yùn)行功率,選擇合適的功率底板。
2.完成所有電氣鏈接:
a)將伺服模塊安裝到模塊轉(zhuǎn)接底板上
b)將轉(zhuǎn)接底板和功路板連接
c)電機(jī)
d)電機(jī)反饋
e)安全轉(zhuǎn)矩切換(STO),或用跳線短接
f)IO控制信號(hào)
g)AC輸入電源
3.使用USB/232電纜連接驅(qū)動(dòng)器和PC。
4.為驅(qū)動(dòng)器和PC供電。
5.連接至現(xiàn)場(chǎng)總線設(shè)備(可選)。
6.打開FortiorTechServoStudio軟件(無(wú)需安裝)。
7.使用FortiorTechServoStudio配置和調(diào)試驅(qū)動(dòng)器。
FortiorTechServoStudio調(diào)試軟件
FortiorTechServoStudio概述
FortiorTechServoStudio是一個(gè)圖形化用戶界面 (GUI) ,與 伺服模塊一起提供,用于安裝、配置和調(diào)試驅(qū)動(dòng)器。FortiorTechServoStudio可用于在線調(diào)試驅(qū)動(dòng)器參數(shù)及完成特定的驅(qū)動(dòng)器操作。
FortiorTechServoStudio提供兩種初始化系統(tǒng)配置方法:
使用【通用-備份和恢復(fù)】,點(diǎn)擊 “默認(rèn)參數(shù)”完成初始化參數(shù)配置,然后在【電機(jī)】配置電機(jī)參數(shù),在【反饋】配置編碼器分辨率。
?使用【通用-備份和恢復(fù)】,電機(jī)“導(dǎo)入?yún)?shù)”導(dǎo)入之前配置過的電機(jī)參數(shù)數(shù)據(jù)。
FortiorTechServoStudio主界面包括5個(gè)功能區(qū):
1.工具欄,包含常用的快速功能按鈕。
Offline|Online – 切換 FortiorTechServoStudio在線/離線狀態(tài),并顯示連接狀態(tài)。請(qǐng)參見章節(jié)【驅(qū)動(dòng)器在線與離線】 。
Enable|Disable – 使能/禁止驅(qū)動(dòng)器,并顯示驅(qū)動(dòng)器的使能狀態(tài)。
Save – 將當(dāng)前驅(qū)動(dòng)器 RAM 中的參數(shù)保存至驅(qū)動(dòng)器存儲(chǔ)器中。建議在配置參數(shù)后使用保存按鈕,以保存存儲(chǔ)器中的參數(shù)值。
No FLT — 清除驅(qū)動(dòng)器故障。當(dāng)驅(qū)動(dòng)器發(fā)生故障時(shí)該位會(huì)變紅,電機(jī)可以清除故障。
2.信息欄:
Stop —停止電機(jī)并禁止驅(qū)動(dòng)器。
Help —FortiorTechServoStudio軟件的在線幫助。在該版本軟件中并沒有開放此功能。
About —軟件版本信息,該版本中該功能還未開放。
3.側(cè)邊欄:
包含F(xiàn)ortiorTechServoStudio界面的一個(gè)導(dǎo)航菜單。
側(cè)邊欄可以通過該箭頭按鈕隱藏或顯示。
4.主操作界面:顯示查看、設(shè)定和測(cè)試參數(shù)和配置驅(qū)動(dòng)器的各個(gè)交互式界面。這些界面會(huì)在本手冊(cè)的其他章節(jié)中詳細(xì)說明。
故障顯示: 如果沒有故障,此段狀態(tài)欄背景為綠色;若存在故障,則為紅色。點(diǎn)擊該區(qū)域,可打開【故障】界面。
警告顯示: 若沒有警告,此段狀態(tài)欄背景為綠色;若存在警告,則為紅色。
驅(qū)動(dòng)器狀態(tài): 當(dāng)驅(qū)動(dòng)器使能時(shí),此段狀態(tài)欄背景為綠色,顯示“Drive Active”;當(dāng)驅(qū)動(dòng)器未使能時(shí)為紅色,顯示“”。
5.狀態(tài)欄:顯示驅(qū)動(dòng)器狀態(tài)。
故障顯示: 如果沒有故障,此段狀態(tài)欄背景為綠色;若存在故障,則為紅色。點(diǎn)擊該區(qū)域,可打開【故障】界面。
警告顯示: 若沒有警告,此段狀態(tài)欄背景為綠色;若存在警告,則為紅色(目前警告和故障沒做區(qū)分)。
驅(qū)動(dòng)器狀態(tài): 當(dāng)驅(qū)動(dòng)器使能時(shí),此段狀態(tài)欄背景為綠色,顯示“Drive Active”;當(dāng)驅(qū)動(dòng)器未使能時(shí)為紅色,顯示“Drive Inactive”。
運(yùn)行模式: 此段背景為灰色。顯示當(dāng)前運(yùn)行模式。
Curr:顯示當(dāng)前運(yùn)行電流。
Vel:顯示當(dāng)前電機(jī)轉(zhuǎn)速。
Pos:顯示電機(jī)當(dāng)前位置。
Online/Offline:上位機(jī)和驅(qū)動(dòng)器連接狀態(tài)
審核編輯 黃宇
-
控制器
+關(guān)注
關(guān)注
112文章
16361瀏覽量
178030 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2048瀏覽量
57861
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Banana Pi BPI-CanMV-K230D-Zero :AIoT 應(yīng)用的 Kendryte K230D RISC-V
關(guān)于峰岹的調(diào)試問題
Banana Pi BPI-R3路由器開發(fā)板運(yùn)行 OrayOS物聯(lián)網(wǎng)系統(tǒng)

Banana Pi BPI-R3路由器開發(fā)板運(yùn)行 OrayOS物聯(lián)網(wǎng)系統(tǒng)
基于Banana Pi BPI-5202 龍芯2K2000的工業(yè)控制網(wǎng)關(guān)設(shè)計(jì)
峰岹科技推出“掃、振一體伺服控制”電動(dòng)牙刷方案

Banana Pi BPI-R3 聯(lián)發(fā)科MT7986方案開源路由器開箱及性能測(cè)試
Banana Pi BPI-M4 Berry創(chuàng)建熱點(diǎn)和設(shè)置靜態(tài)IP

Banana Pi BPI-F3 進(jìn)控時(shí)空SpacemiT K1芯片場(chǎng)景功耗測(cè)試
Banana Pi BPI-M4 Berry 開源硬件開發(fā)板以太網(wǎng)口和WiFi測(cè)試
伺服驅(qū)動(dòng)器對(duì)伺服電機(jī)的控制要求
伺服電機(jī)控制器怎么調(diào)參數(shù)
峰岹科技:攜領(lǐng)先的電機(jī)控制芯片及解決方案登陸EMK韓國(guó)展表現(xiàn)亮眼
峰岹科技攜伺服控制方案亮相全國(guó)直線電機(jī)會(huì)議





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論