 Openwrt開發指南 第27章 DS18B20溫度傳感器
Openwrt開發指南 第27章 DS18B20溫度傳感器
開發環境:
主機:Ubuntu12.04
開發板:RT5350
Openwrt:Openwrt15.05
1 硬件原理
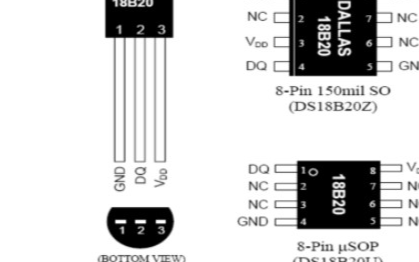
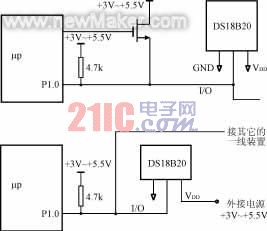
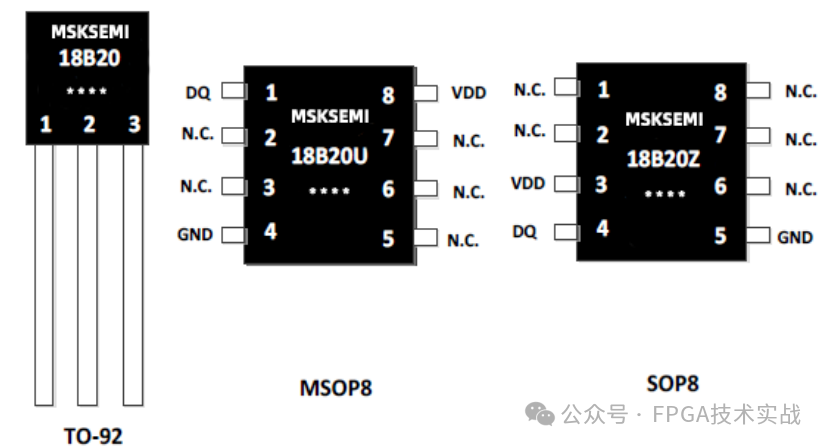
下圖是我們溫度傳感器的接入引腳,3.3V 供電,io 口接 P07的 GP0( GPIO0 的簡稱 )。
DS18B20 數字溫度傳感器接線方便,封裝成后可應用于多種場合,如管道式,螺紋式,磁鐵吸附式,不銹鋼封裝式,型號多種多樣,有 LTM8877,LTM8874 等等。主要根據應用場合的不同而改變其外觀。封裝后的 DS18B20 可用于電纜溝測溫,高爐水循環測溫,鍋爐測溫,機房測溫,農業大棚測溫,潔凈室測溫,彈藥庫測溫等各種非極限溫度場合。耐磨耐碰,體積小,使用方便,封裝形式多樣,適用于各種狹小空間設備數字測溫和控制領域。
2 單總線的概念
目前常用的微機與外設之間進行數據傳輸的串行總線主要有 I2C 總線、 SPI 總線和 SCI總線。其中 I2C 總線以同步串行 2 線方式進行通信(一條時鐘線,一條數據線) ,SPI 總線則以同步串行 3 線方式進行通信(一條時鐘線,一條數據輸入線,一條數據輸出線),而 SCI 總線是以異步方式進行通信(一條數據輸入線,一條數據輸出線) 。這些總線至少需要兩條或兩條以上的信號線。
1-wire , 即 單 線 總 線 , 又 叫 單 總 線 。 近 年 來 , 美 國 的 達 拉 斯 半 導 體 公 司(DALLASSEMICONDUCTOR) 推出了一項特有的單總線(1-Wire Bus)技術。該技術與上述總線不同,它采用單根信號線,既可傳輸時鐘,又能傳輸數據,而且數據傳輸是雙向的,因而這種單總線技術具有線路簡單,硬件開銷少,成本低廉,便于總線擴展和維護等優點。
3 ds18b20 相關時序
- 初始化(復位)時序圖:
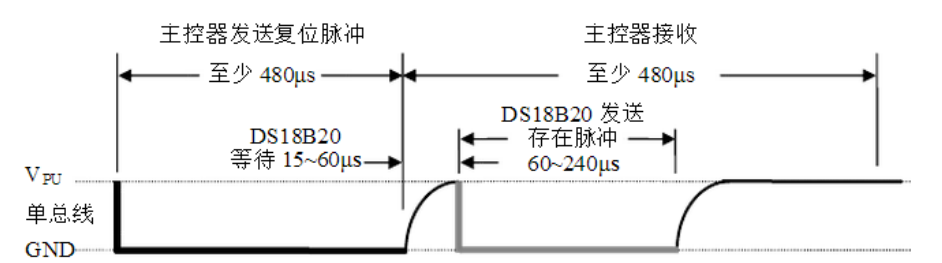
(1) 先將數據線置高電平“ 1” 。
(2) 延時(該時間要求的不是很嚴格,但是盡可能的短一點)
(3) 數據線拉到低電平“ 0” 。
(4) 延時 750 微秒(該時間的時間范圍可以從 480 到 960 微秒) 。
(5) 數據線拉到高電平“ 1” 。
(6) 延時等待(如果初始化成功則在 15 到 60 微秒時間之內產生一個由 DS18B20 所
返回的低電平“ 0” 。據該狀態可以來確定它的存在,但是應注意不能無限的進行等待,不然會使程序進入死循環,所以要進行超時控制) 。
(7) 若 CPU 讀到了數據線上的低電平“ 0”后,還要做延時,其延時的時間從發出的高電平算起(第(5)步的時間算起)最少要 480 微秒。
(8) 將數據線再次拉高到高電平“ 1”后結束。
- 寫 ds18b20 時序圖:
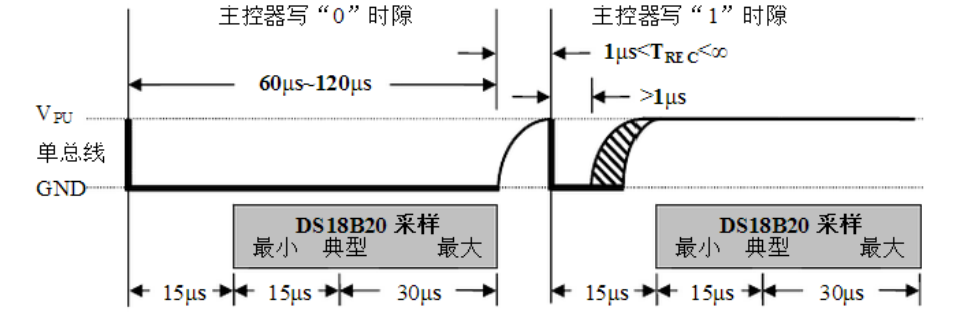
(1) 數據線先置低電平“ 0” 。
(2) 延時確定的時間為 15 微秒。
(3) 按從低位到高位的順序發送字節(一次只發送一位) 。
(4) 延時時間為 45 微秒。
(5) 將數據線拉到高電平。
(6) 重復上(1)到(6)的操作直到所有的字節全部發送完為止。
(7) 最后將數據線拉高。
- 讀 ds18b20 時序圖:
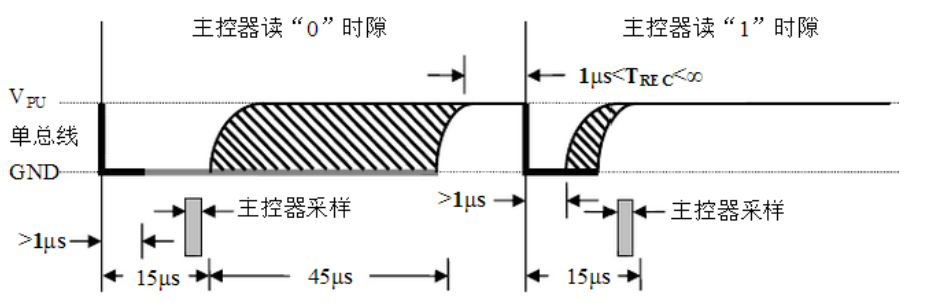
(1)將數據線拉高“ 1” 。
(2)延時 2 微秒。
(3)將數據線拉低“ 0” 。
(4)延時 3 微秒。
(5)將數據線拉高“ 1” 。
(6)延時 5 微秒。
(7)讀數據線的狀態得到 1 個狀態位,并進行數據處理。
(8)延時 60 微秒。
4 驅動程序
關于字符設備驅動程序的使用,我們可以參照點亮 led 燈的那個實驗,這里只給出跟ds18b20 密切相關的驅動程序,詳細的程序請查看我們的驅動文件!
//配置連接溫度傳感器的引腳
#define DS18B20_L *GPIO21_0_DATA &= ~(1< //低電平
#define DS18B20_H *GPIO21_0_DATA |= (1< //高電平
#define DS18B20_OUT *GPIO21_0_DIR |= (1< //輸出
#define DS18B20_IN *GPIO21_0_DIR &= ~(1< //輸入
#define DS18B20_STA *GPIO21_0_DATA & 0x01
//寄存器定義
volatile unsigned long *GPIO21_0_DIR;
volatile unsigned long *GPIO21_0_DATA;
/**************** 基本定義 **********************/
//初始化函數必要資源定義
//用于初始化函數當中
//device number;
dev_t dev_num;
//struct dev
struct cdev ds18b20_cdev;
//auto "mknode /dev/ds18b20 c dev_num minor_num"
struct class *ds18b20_class = NULL;
struct device *ds18b20_device = NULL;
/******************** ds18b20有關的函數 ****************************/
//復位ds18b20傳感器
static unsigned char ds18b20_reset(void)
{
unsigned char ret = 0;
unsigned char count = 0;
DS18B20_OUT;
DS18B20_H;
udelay(100);
DS18B20_L;
udelay(600);
DS18B20_H;
udelay(45);
DS18B20_IN;
do
{
ret = DS18B20_STA;
udelay(1);
count++;
}
while(ret != 0 && count< 50);
DS18B20_OUT;
udelay(400);
DS18B20_H;
return ret;
}
//從ds18b20讀取一個字節
static unsigned char read_byte(void)
{
unsigned char i,byte=0;
DS18B20_OUT;
DS18B20_H;
udelay(100);
for(i = 0; i< 8; i++)
{
byte > >= 1;
DS18B20_L;
udelay(4);
DS18B20_H;
udelay(2);
if(DS18B20_STA == 1)
byte |= 0x80;
udelay(10);
}
return byte;
}
//向ds18b20寫入一個字節
static unsigned char write_byte(unsigned char byte)
{
unsigned char i;
DS18B20_OUT;
DS18B20_H;
udelay(100);
for(i = 0; i< 8; i++)
{
DS18B20_L;
if( byte & 0x01 )
DS18B20_H;
else
DS18B20_L;
udelay(40);
DS18B20_H;
byte > >= 1;
}
udelay(10);
}
//從ds18b20中讀出溫度數據
static unsigned int read_temp(void)
{
unsigned int t = 0 , l = 0;
if(ds18b20_reset())
{
printk("step1,reset_ds18b20 error!n");
return 0;
}
write_byte(0xcc);
write_byte(0x44);
udelay(4);
if(ds18b20_reset())
{
printk("step2,reset_ds18b20 error!n");
return 0;
}
write_byte(0xcc);
write_byte(0xbe);
l = read_byte();
t = read_byte();
t < <= 8;
t += l;
return t;
}
/**********************************************************************/
/**************** 結構體 file_operations 成員函數 *****************/
//open
static int ds18b20_open(struct inode *inode, struct file *file)
{
printk("ds18b20 drive open...n");
DS18B20_OUT; //初始化該引腳為輸出;
return 0;
}
//close
static int ds18b20_close(struct inode *inode , struct file *file)
{
return 0;
}
//read
static ssize_t ds18b20_read(struct file *file, char __user *buffer,
size_t len, loff_t *pos)
{
unsigned int temp;
printk("ds18b20 drive read...n");
temp = read_temp();
copy_to_user(buffer, &temp, 4);
return 4;
}
/***************** 結構體: file_operations ************************/
//struct
static const struct file_operations ds18b20_fops = {
.owner = THIS_MODULE,
.open = ds18b20_open,
.release = ds18b20_close,
.read = ds18b20_read,
};
/************* functions: init , exit*******************/
//條件值變量,用于指示資源是否正常使用
unsigned char init_flag = 0;
unsigned char add_code_flag = 0;
//init
static __init int ds18b20_init(void)
{
int ret_v = 0;
printk("ds18b20 drive init...n");
//函數alloc_chrdev_region主要參數說明:
//參數2: 次設備號
//參數3: 創建多少個設備
if( ( ret_v = alloc_chrdev_region(&dev_num,0,1,"ds18b20") ) < 0 )
{
goto dev_reg_error;
}
init_flag = 1; //標示設備創建成功;
printk("The drive info of ds18b20:nmajor: %dnminor: %dn",
MAJOR(dev_num),MINOR(dev_num));
cdev_init(&ds18b20_cdev,&ds18b20_fops);
if( (ret_v = cdev_add(&ds18b20_cdev,dev_num,1)) != 0 )
{
goto cdev_add_error;
}
ds18b20_class = class_create(THIS_MODULE,"ds18b20");
if( IS_ERR(ds18b20_class) )
{
goto class_c_error;
}
ds18b20_device = device_create(ds18b20_class,NULL,dev_num,NULL,"ds18b20");
if( IS_ERR(ds18b20_device) )
{
goto device_c_error;
}
printk("auto mknod success!n");
//------------ 請在此添加您的初始化程序 --------------//
GPIO21_0_DATA = (volatile unsigned long *)ioremap(0x10000620, 4);
GPIO21_0_DIR = (volatile unsigned long *)ioremap(0x10000624, 4);
//如果需要做錯誤處理,請:goto ds18b20_error;
add_code_flag = 1;
//---------------------- END ---------------------------//
goto init_success;
dev_reg_error:
printk("alloc_chrdev_region failedn");
return ret_v;
cdev_add_error:
printk("cdev_add failedn");
unregister_chrdev_region(dev_num, 1);
init_flag = 0;
return ret_v;
class_c_error:
printk("class_create failedn");
cdev_del(&ds18b20_cdev);
unregister_chrdev_region(dev_num, 1);
init_flag = 0;
return PTR_ERR(ds18b20_class);
device_c_error:
printk("device_create failedn");
cdev_del(&ds18b20_cdev);
unregister_chrdev_region(dev_num, 1);
class_destroy(ds18b20_class);
init_flag = 0;
return PTR_ERR(ds18b20_device);
//------------------ 請在此添加您的錯誤處理內容 ----------------//
ds18b20_error:
add_code_flag = 0;
return -1;
//-------------------- END -------------------//
init_success:
printk("ds18b20 init success!n");
return 0;
}
//exit
static __exit void ds18b20_exit(void)
{
printk("ds18b20 drive exit...n");
if(add_code_flag == 1)
{
//---------- 請在這里釋放您的程序占有的資源 ---------//
printk("free your resources...n");
iounmap(GPIO21_0_DATA);
iounmap(GPIO21_0_DIR);
printk("free finishn");
//---------------------- END -------------------//
}
if(init_flag == 1)
{
//釋放初始化使用到的資源;
cdev_del(&ds18b20_cdev);
unregister_chrdev_region(dev_num, 1);
device_unregister(ds18b20_device);
class_destroy(ds18b20_class);
}
}
/**************** module operations**********************/
//module loading
module_init(ds18b20_init);
module_exit(ds18b20_exit);
//some infomation
MODULE_LICENSE("GPL v2");
MODULE_AUTHOR("from Jafy");
MODULE_DESCRIPTION("ds18b20 drive");
5 應用程序
int main(int argc, char **argv)
{
int fd;
float t;
unsigned int tmp = 0;
//打開溫度傳感器驅動模塊
fd = open("/dev/ds18b20", O_RDWR | O_NONBLOCK);
if (fd < 0)
{
printf("can't open!n");
return -1;
}
read(fd, &tmp, sizeof(tmp));
t = tmp * 0.0625;
printf("the current temperature is %fn",t);
close(fd);
return 0;
}
編譯模塊驅動,不熟悉的朋友可看LED驅動相關。
$make package/kernel/ds18b20/compile V=99
編譯模塊驅動和應用程序
$make package/ds18b20_app/compile V=99
$make package/ds18b20_app/install V=99
$make package/index V=99
復制文件傳給開發板測試
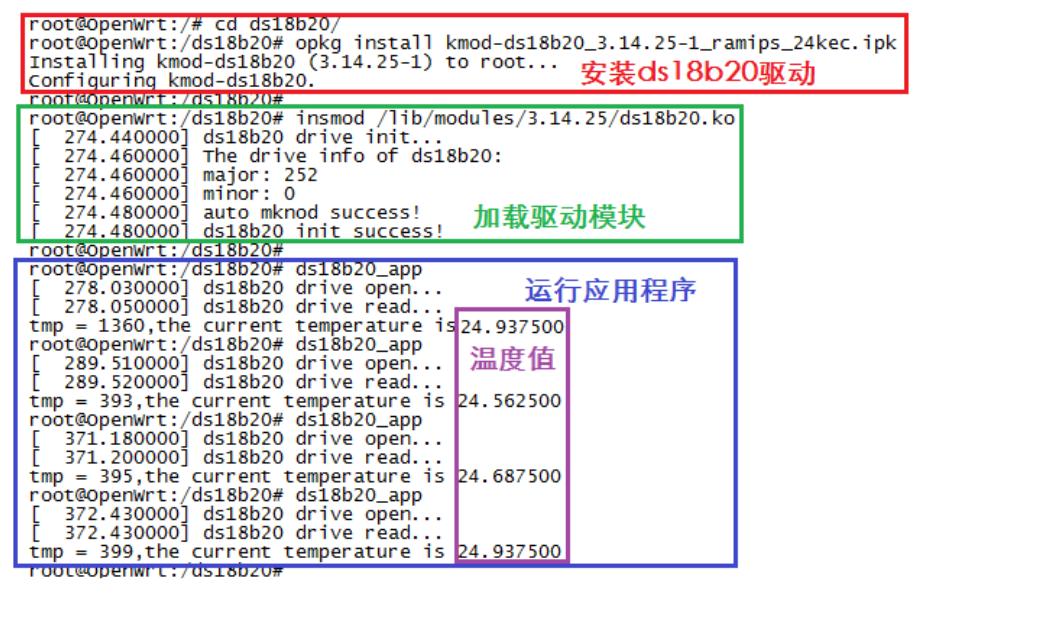
6 實驗結果
審核編輯:湯梓紅
-
溫度傳感器
+關注
關注
48文章
2940瀏覽量
156061 -
DS18B20
+關注
關注
10文章
779瀏覽量
80857 -
引腳
+關注
關注
16文章
1196瀏覽量
50465 -
開發板
+關注
關注
25文章
5047瀏覽量
97441 -
OpenWrt
+關注
關注
10文章
130瀏覽量
39302
發布評論請先 登錄
相關推薦
基于STM32的DS18B20溫度傳感器設計
DS18B20溫度傳感器是什么
智能溫度傳感器DS18B20的原理與應用
ds18b20的特性_ds18b20溫度傳感器應用
【正點原子FPGA連載】第二十七章DS18B20數字溫度傳感器實驗 -摘自【正點原子】新起點之FPGA開發指南_V2.1






 工商網監
工商網監
評論