 KUKA機器人視覺抓取的工作原理
KUKA機器人視覺抓取的工作原理
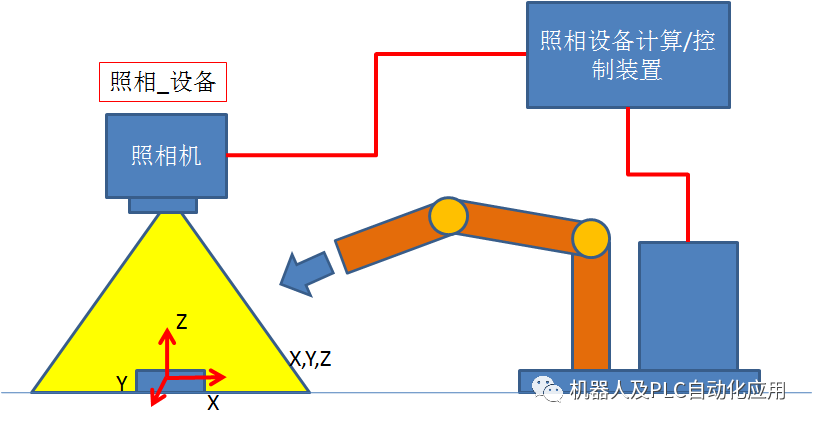
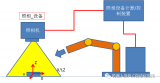
視覺抓取主要是通過改變機器人的TOOL坐標系或BASE坐標系來實現的.
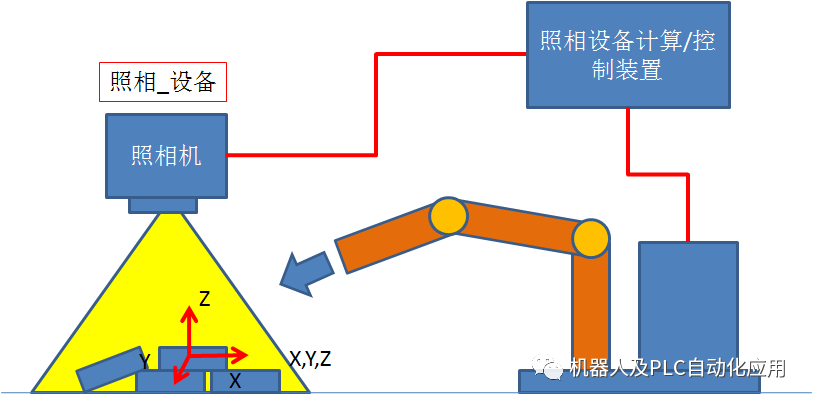
物體位置的變化主要是它位置的X,Y,Z 方向的變化.
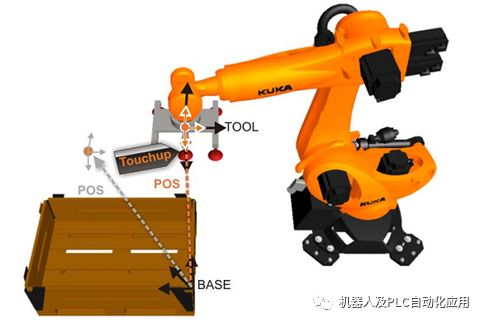
BASE坐標系:可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。
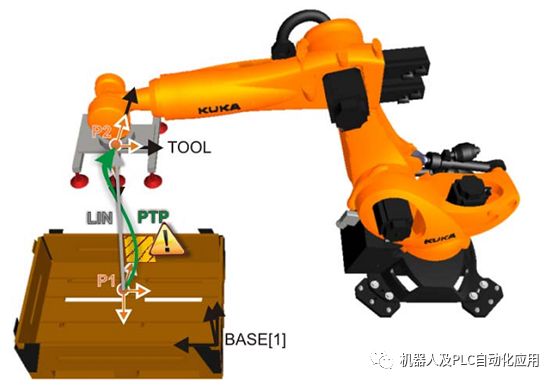
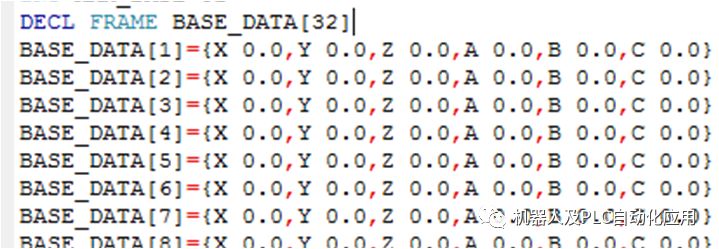
以改變BASE 坐標系為例:
KUKAC4 現在可以使用32個BASE 坐標系
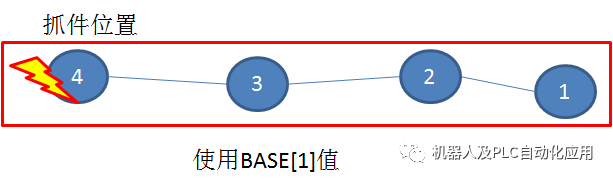
沒有使用視覺補償功能時,只用一個BASE坐標系.
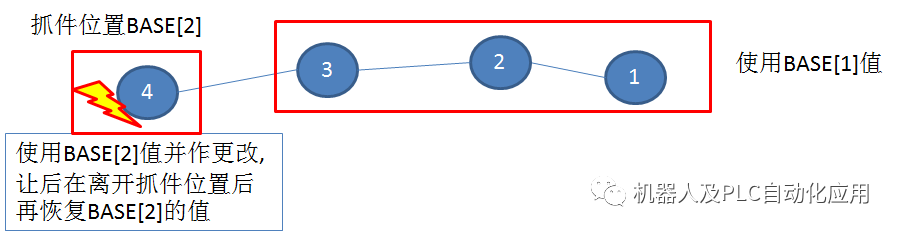
改變機器人BASE坐標系值從而改變機器人抓件位置,使用多個坐標系.
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28418瀏覽量
207103 -
TCP
+關注
關注
8文章
1353瀏覽量
79077 -
KUKA
+關注
關注
3文章
217瀏覽量
16533
原文標題:KUKA 機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
機器人視覺——機器人的“眼睛”
大量的編程時間,進步生產效率和加工質量。 我國視覺機器人應用主要有以下目的:用以代替人類從事危險、有害和惡劣環境、超凈環境下的工作;把人從骯臟、繁重的勞動中解放出來;進步勞動生產率,改
發表于 01-23 15:02
KUKA機器人問題解答
1 開機坐標系無效 世界坐標系是以槍頭為基點,在這種坐標系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標系中移動,槍頭也隨著改變方向,那就是我們在
發表于 07-15 07:48
【MYD-CZU3EG開發板試用申請】基于機器視覺的工業機器人抓取工作站
項目名稱:基于機器視覺的工業機器人抓取工作站試用計劃:申請理由本人是嘉興技師學院教師,浙江機器人
發表于 09-18 14:18
【瑞芯微RK1808計算棒試用申請】基于機器視覺的工業機器人抓取工作站
項目名稱:基于機器視覺的工業機器人抓取工作站試用計劃:申請理由 本人是嘉興技師學院教師,浙江機器人
發表于 09-18 19:24
KUKA機器人視覺抓取的工作原理講解
BASE坐標系: 可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。
KUKA機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
BASE坐標系: 可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。
KUKA機器人視覺抓取的工作原理
BASE坐標系: 可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。
發表于 09-16 15:35
?709次閱讀
淺談機器人視覺抓取的目的
機器人視覺抓取的目的是使用一個機械手模型(包括二指或多指夾爪,吸盤等),以RGB或RGBD相機采集的場景圖像為輸入計算出一個最優的抓取位姿,使機械手在該位姿下可以穩定地
發表于 03-30 10:19
?725次閱讀

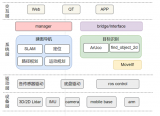
基于視覺的自主導航移動抓取機器人搭建方案
經過以上對移動抓取機器人系統詳細的剖析,我們可以知道移動抓取機器人系統并不是簡單的“堆料”,而是以移動底盤的智能路徑規劃、視覺識別、移動底盤
發表于 12-19 15:09
?743次閱讀





 工商網監
工商網監
評論