 10 BASE 以太網與CAN-XL有哪些不同點呢?
10 BASE 以太網與CAN-XL有哪些不同點呢?
隨著EEA-Zonal的架構概念不斷發展,為了充分利用這種新架構的優勢,顯然需要將以太網連接擴展到終端傳感器和驅動器。現有的傳統連接技術(如FlexRay和CAN)通常要求在網關中實現協議轉換,這可能導致成本、復雜性和延時增加。現有的汽車以太網技術(如100BASE-T1)需要使用點對點交換連接,無法滿足支持終端連接應用向以太網過渡的系統成本要求。
10BASE-T1S提供缺失的鏈接,通過優化的以太網到邊緣連接支持這種過渡。在這個部署過程中,仍然需要克服一些問題,例如以太網連接會增加模塊實施方案的元件成本和復雜性。10BASE-T1S通過降低系統成本,以及提供多種支持不同類型的信號鏈分區的產品選擇來解決這些問題。
一、10BASE-T1S 介紹
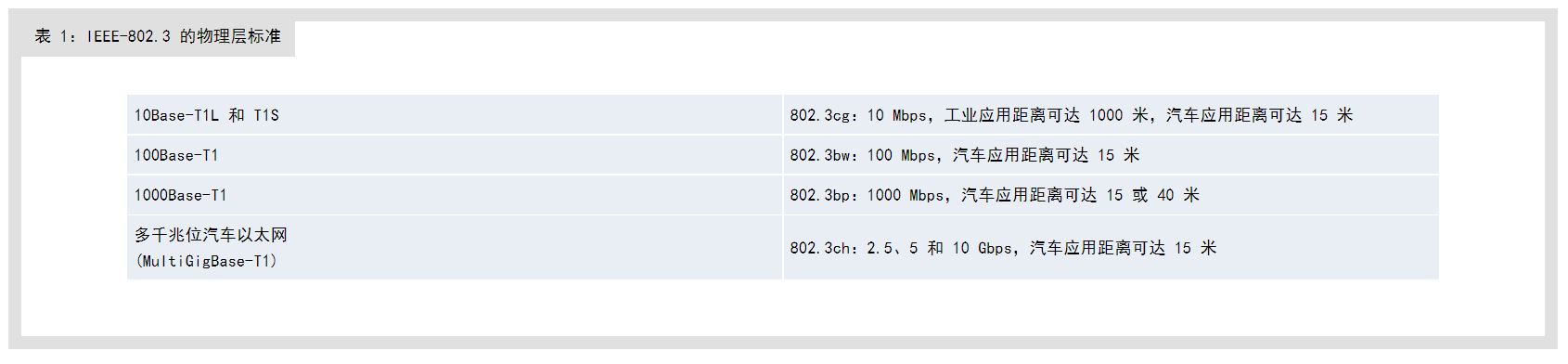
IEEE開發了以太網標準的一種新變體,它在單對物理層上提供10Mbit/s的帶寬。這一規范被稱為IEEE Std 802.3cg-2019,并于2020年初發布。它主要包括兩個協議標準:10Base-T1L和10Base-T1S。
10Base-T1L是10Mbit/s的SPE(Single Pair Ethernet)的遠距離變體,允許電纜長度達到1000米。這種點對點的變體可應用于卡車、火車和其他車輛技術,也可用于工業4.0。通過該協議,可以打破在工廠執行一線服務的基本操作設備(傳感器、閥門、執行器和控制器)與實現新型智能工廠所需的智能企業數據、比特和字節庫之間的障礙。然而,對于汽車應用而言,這種變體并不適用。
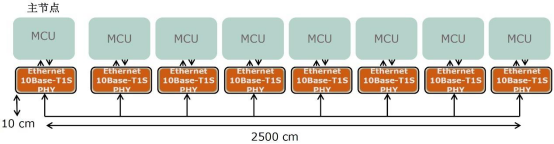
10Base-T1S提供端到端的短距離全雙工傳輸,或者是半雙工的多對多傳輸,適用于汽車應用。10BASE-T1S與其他汽車以太網技術的不同之處在于,它支持多點拓撲結構,所有節點都通過同一對非屏蔽雙絞線連接。這種總線配置提供了一個優化的BOM(Bill of Materials),只需在每個節點上部署一個以太網PHY,而無需采用與其他以太網技術相關的交換機或星型拓撲。該標準規定必須支持至少8個節點(可以支持更多節點),總線長度必須達到25米。 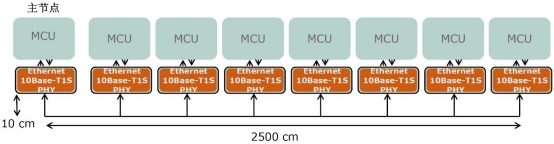 ?
?
10Baes-T1S 總線式以太網
在使用10BASE-T1S總線拓撲時,需要特別關注服務質量,因此采用了一種稱為物理層沖突規避(PLCA)的輪詢機制。PLCA的目的是避免共享網絡上的沖突,不像FlexRay中使用固定調度會浪費未使用的傳輸時隙,相比CAN系列規范,PLCA使用了更高的帶寬利用率。
PLCA是對CSMA/CD的擴展,其目標是改進以太網在多分叉(總線)拓撲結構上現有碰撞檢測機制(CSMA/CD)在吞吐量、延遲和公平性方面的表現。這種仲裁純粹在物理層進行,MAC在以下描述的過程中不承擔任何作用。啟動PLCA后,只有具有傳輸機會的物理層設備被允許發送數據。傳輸機會以循環方式分配。每個物理層設備可以在其傳輸機會期間發送信息幀。當主節點發送信標時,新的周期開始。
 ?
?
PLCA 循環示例
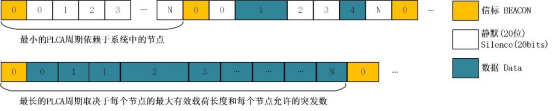
在PLCA系統中,每個物理層設備(PHY)都被分配一個獨一無二的PHY ID,范圍從0到255。PHY ID為0的設備是PLCA協調器。每個PHY設備都知道系統中PHY設備的數量。PLCA采用輪詢方案,每個輪次由PLCA協調器發送一個信標(BEACON)來觸發。在PLCA方案中,每個參與者(包括協調器)按照PHY ID的順序,在信標之后都有一個發送機會。
如果一個節點沒有待發送的數據,系統中的下一個PHY設備將在超時時間后獲得機會。如果節點有待傳輸的數據,允許在其傳輸機會內開始傳輸幀。如果系統配置允許,節點還可以進行突發傳輸,即發送多個幀,每個消息的有效載荷長度可以不同。
這種調度方案避免了總線沖突和重傳,降低了帶寬的使用,并保證了系統內傳輸機會的公平性。實踐中觀察到兩個節點之間的往返延遲小于半毫秒,在使用iperf3工具測量IP網絡上的最大可實現帶寬時,幾乎可以達到10Mbit/s的全速。在這種PLCA機制的基礎上,可以在MAC層啟用CBS或TAS等功能。
目前,數據線傳輸功率(PoDL)的傳輸尚未完全標準化,但已有一些工作組在研究和制定相關標準。IEEE正在擴展802.3cg規范,其中包括添加PoDL功能。10BASE-T1S的物理層是交流耦合的,因此可以為遠程設備提供電力。
10BASE-T1S主要具有以下五個特點:多點物理層、無沖突、高效的帶寬利用、確定性和低延遲、安全機制。基于這些特點,10BASE-T1S非常適用于傳統汽車網絡中的各種應用場景。
二、10BASE-T1S 與CAN-XL 對比
降低系統復雜性和成本一直是合理的訴求。從長遠來看,由于以太網完全覆蓋了FlexRay和MOST的應用領域,因此FlexRay和MOST很可能被替換,只保留CAN和以太網。以太網適用于娛樂、ADAS、車聯網等系統,工作速率在100~1000Mbit/s之間;而CAN/CAN-FD適用于發動機管理和車身控制等系統,工作速率在0.5~5Mbit/s之間。考慮到車載網絡系統中大約90%的控制器節點的通信速率低于10Mbit/s,因此10Mbit/s的通信速率可以滿足廣泛的應用需求,無論是音頻、雷達、超聲波傳感器還是底盤控制。因此,CAN-XL和以太網10BASE-T1S在這個領域存在競爭關系。
這兩種協議的開發都是為了滿足新的電子/電氣架構要求,并在10Mbit/s的區域提供預期的性能。這兩種協議都提供相同的數據速率,允許應用傳輸更長的有效載荷,并在總線上實現接近10Mbit/s的傳輸速度。然而,它們的介質訪問方案不同。接下來將對它們的數據報效率和總線循環效率進行對比。
2.1數據報的效率
兩種協議在數據報中都有頭部和尾部的開銷,包括尋址、協議字段和CRC等。在CAN-XL中,仲裁階段和數據階段的填充位以及不同的總線速度會進一步影響效率。
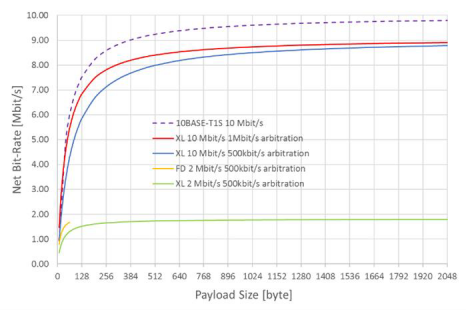
通過將開銷量與有效負載位上的時間開銷相關聯,可以繪制出數據報在有效負載上的效率曲線。CAN-XL的仲裁階段較慢,報頭較大,開銷較高。以1Mbit/s而不是500kbit/s的速度運行仲裁階段可以顯著提高數據報的效率,特別對于較短的幀來說效果更為顯著。
 ?
?
數據報的效率比較
2.2總線循環效率
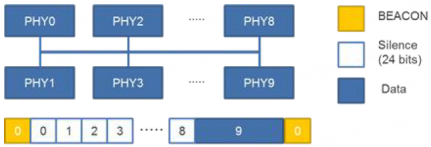
如果我們觀察PLCA循環而不是單個數據報,情況將會有所改變。假設系統配置如圖所示,并假設只有PHY9有待處理的傳輸。
PLCA 循環示例
在這種情況下,假設總線保持未使用狀態的時間是靜默時間(24位)的9倍。另外,考慮到BEACON所需的額外時間,數據傳輸的效率將會發生變化,具體情況如圖所示。 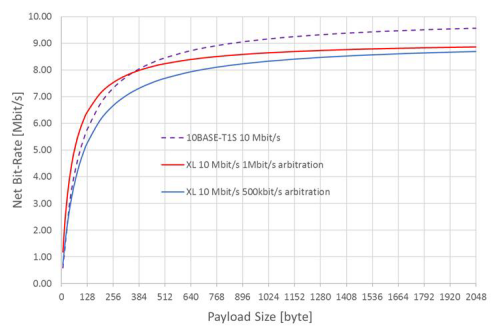
總線循環效率示例
在CAN-XL中,等待任何傳輸機會不會降低總線效率,但我們仍需要考慮空閑時間和EOF序列。在典型工作條件下,具有512字節有效載荷的情況下,CAN-XL和10Base-T1S兩種協議表現出相同的效率。然而,這兩種協議的效率取決于具體的用例、系統配置以及是否使用擴展功能。
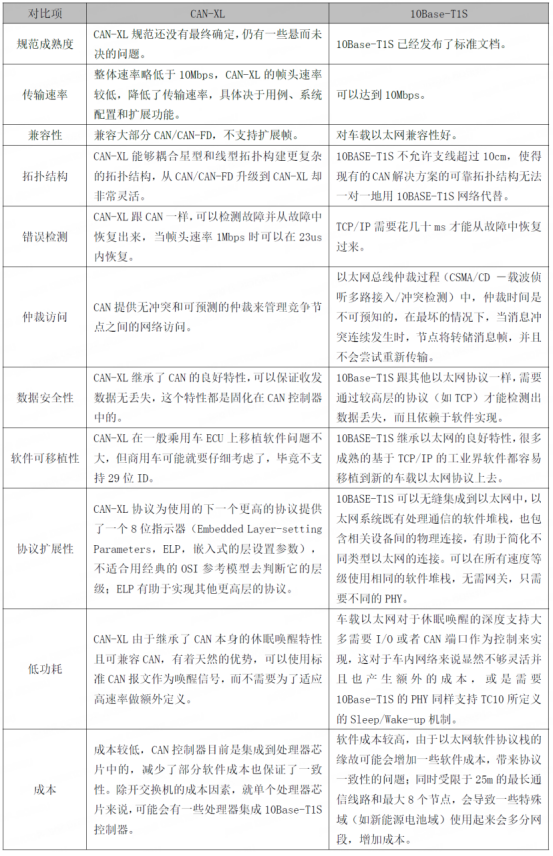
此外,我們還需要考慮到更高級別協議的可用性以及其他增強功能,例如安全性或電力傳輸。10Base-T1S和CAN-XL是兩種不同的技術,在發布的標準中有一些區別,具體可以參考下表。
 ?
?
與10BASE-T1S相比,CAN-XL能夠耦合星型和線型拓撲,從而構建更復雜的拓撲結構。由于10BASE-T1S不允許支線超過10cm的長度,這導致現有的CAN解決方案的可靠拓撲結構無法直接用10BASE-T1S網絡來替代。然而,從CAN/CAN-FD升級到CAN-XL卻非常靈活,這得益于在布線和線束方面投入了大量的專業知識和開發時間。
正是這種平滑的升級過程,使得關注緊湊型和中型汽車的原始設備制造商(OEM)對采用CAN-XL產生了濃厚的興趣。CAN-XL在現有車輛架構的基礎上提供了一個理想的開發平臺,無需重新設計線束、控制器和協議棧。與IP相比,CAN的協議棧更為簡單,這使得可以使用體積更小、成本更低的微控制器。CAN-XL的目標之一就是繼續保持這一傳統優勢。
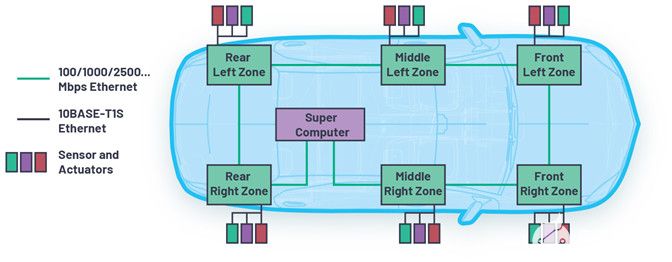
而10BASE-T1可以替代CAN、CAN-FD、LIN、FlexRay或音頻等連接,在以太網架構下,可以在任何地方使用相同的軟件堆棧和通信機制。只需根據各網絡段的特定速度等級更換PHY和線纜。例如,1000BASE-T1用于骨干網絡,100BASE-T1用于診斷和軟件下載,而10BASE-T1S用于車身和動力傳動系統的通信。整個以太網架構無需任何網關,而CAN-XL則需要網關來實現協議轉換,這可能會增加成本、復雜性和延遲。在Zonal架構中,10BASE-T1S能夠完美匹配。
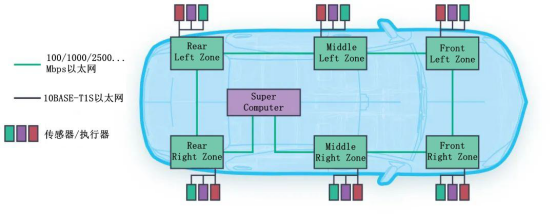
汽車Zonal 架構
10BASE-T1S和CAN-XL各有其優勢。這兩種協議都有可能在同一個車載網絡的不同應用中使用。CAN-XL和10BASE-T1S可以共同提供連接,在基于信號的通信和面向服務的通信之間進行橋接。通過適當擴展協議層,可以為應用程序提供更多的可能性。
審核編輯:劉清
-
傳感器
+關注
關注
2552文章
51291瀏覽量
755168 -
驅動器
+關注
關注
53文章
8263瀏覽量
146683 -
以太網
+關注
關注
40文章
5450瀏覽量
172176 -
交換機
+關注
關注
21文章
2647瀏覽量
99868 -
PHY
+關注
關注
2文章
305瀏覽量
51798
原文標題:10 BASE 以太網與CAN-XL 對比
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
以太網接口10-100Base-T引腳定義
布線技巧四:10Base—T/2/5/F/35—以太網
力科推出100/10BASE-T以太網解碼軟件
以太網轉CAN網關應該如何連接使用
為何10BASE-T1S是汽車通信中缺失的以太網鏈路
以太網筆記:快速以太網100Base-TX接口及編碼

10 BASE以太網與CAN-XL對比分析
10BASE-T1S車載以太網簡介及網絡架構

車載以太網10BASE-T1S通信解決方案






 工商網監
工商網監
評論