 N32L40XCL-STB開發板模塊之UART評測
N32L40XCL-STB開發板模塊之UART評測
1.本章內容
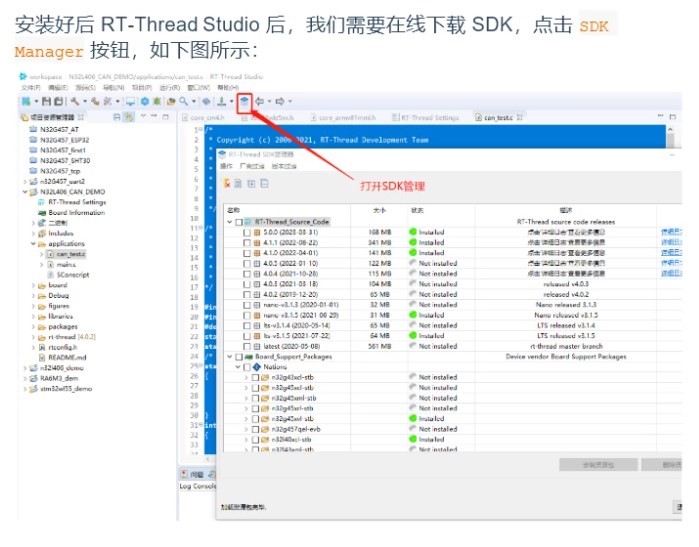
本章通過RT-Thread Studio配置片上外設UART的功能,實現開發板和PC進行通信。
2.模塊介紹
通用同步異步收發器(USART)是一種全雙工串行數據交換接口,支持同步或異步通信。可靈活配置,以便于與多種外部設備進行全雙工數據交換。
N32L40XCL芯片共有5個板載串口,其中串口具備的功能如下:
? 支持全雙工通信
? 支持單線半雙工通信
? 波特率可配置,最高波特率可達 2Mbit/s
? 支持 8bit 或 9bit 數據幀
? 支持 1bit 或 2bit 停止位
? 支持硬件生成校驗位及校驗位檢查
? 支持硬件流控: RTS、CTS
? 支持 DMA 收發
? 支持多處理器通信:如果地址不匹配,則進入靜默模式, 可通過空閑總線檢測或地址標識喚醒
? 支持同步模式,允許用戶在主模式下控制雙向同步串行通信
? 支持智能卡異步協議,符合 ISO7816-3 標準
? 支持串行紅外協議(IrDA SIR)編碼與解碼,提供正常與低功耗兩種運行模式
? 支持 LIN 模式
? 支持多鐘錯誤檢測:數據溢出錯誤、幀錯誤、噪聲錯誤、檢驗錯誤
? 支持多個中斷請求:發送數據寄存器為空、CTS 標志、發送完成、數據已接收、數據溢出、總線空閑、檢驗錯誤、LIN 模式斷開幀檢測、以及多緩沖區通信中的噪聲標志/溢出錯誤/幀錯誤
3.開發軟件
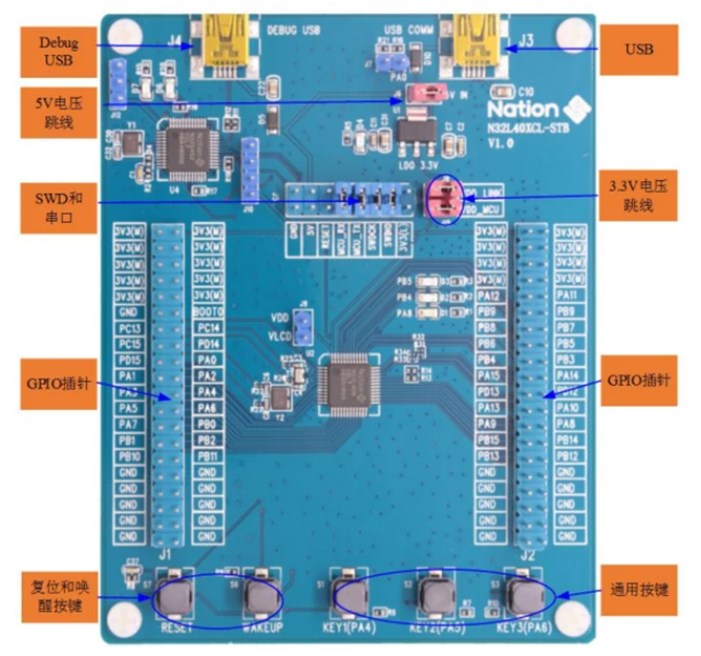
開發板:N32L40XCL-STB V1.0
開發環境:RT-Thread Studio V2.2.3
RT-Thread版本:V4.0.1
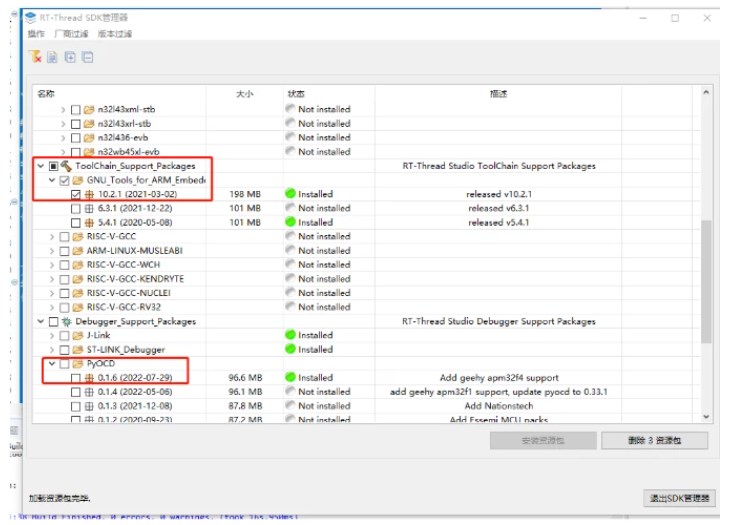
下載工具:DAP-LINK(pyocd V0.1.6)
4.步驟說明
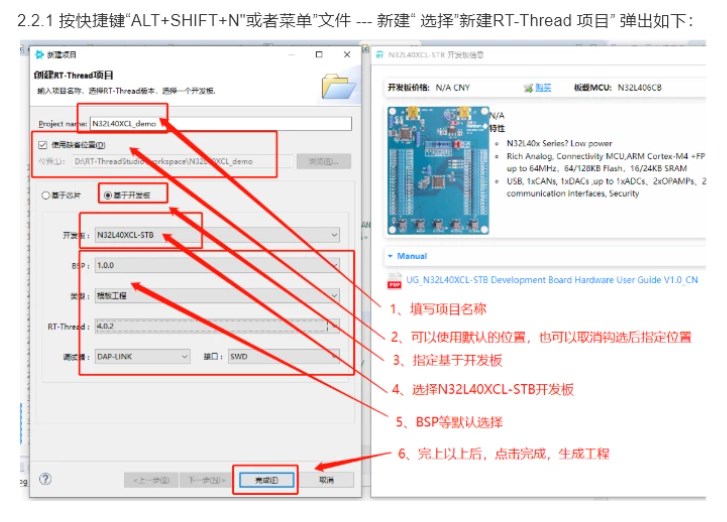
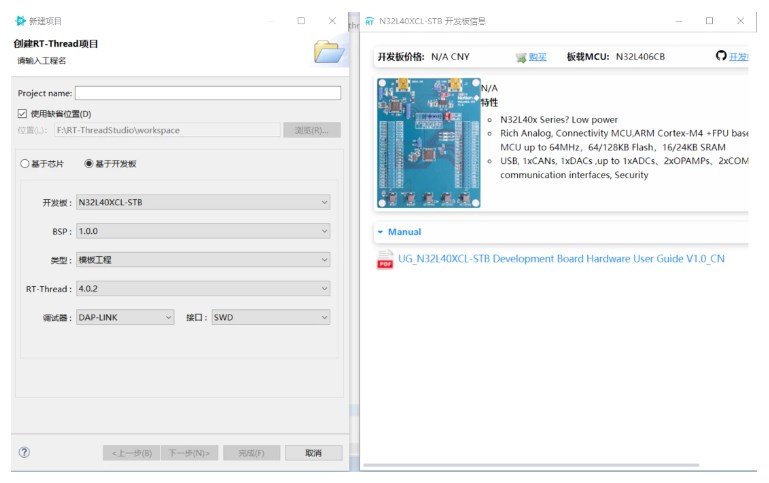
4.1新建工程

【注】N32L40XCL-STB這板開發板,如果用板載的DAP-LINK下載,會報pyocd會報找不到.pyack包的錯誤。
4.2編寫測試程序
4.2.1建好工程后,雙擊“RTThread Settings”

4.2.2使能我們要使用的串口,由于串口1是用做RT-Thread的終端輸出這里我們選擇串口2(PA2-TX/PA3-RX)
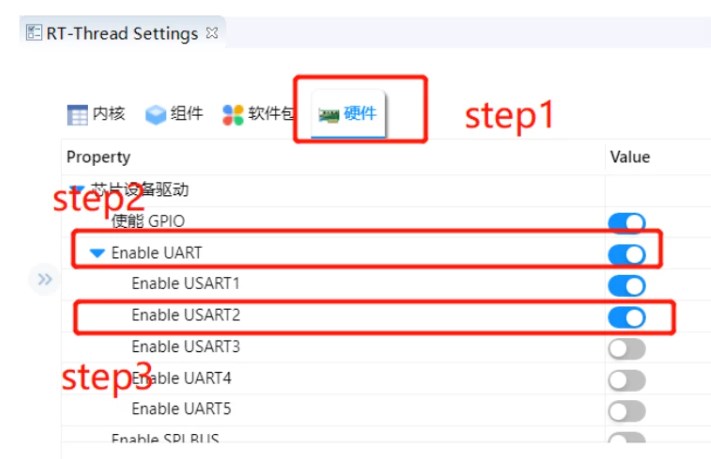
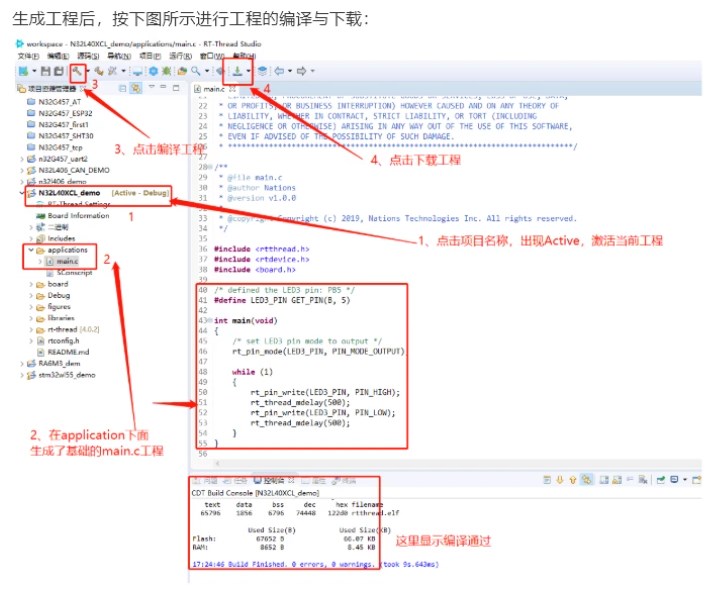
以上2步完成后,就是完成了最基本的配置,進行編譯
進行編寫代碼測試
4.2.3 宏定義我們要用到的LED及串口
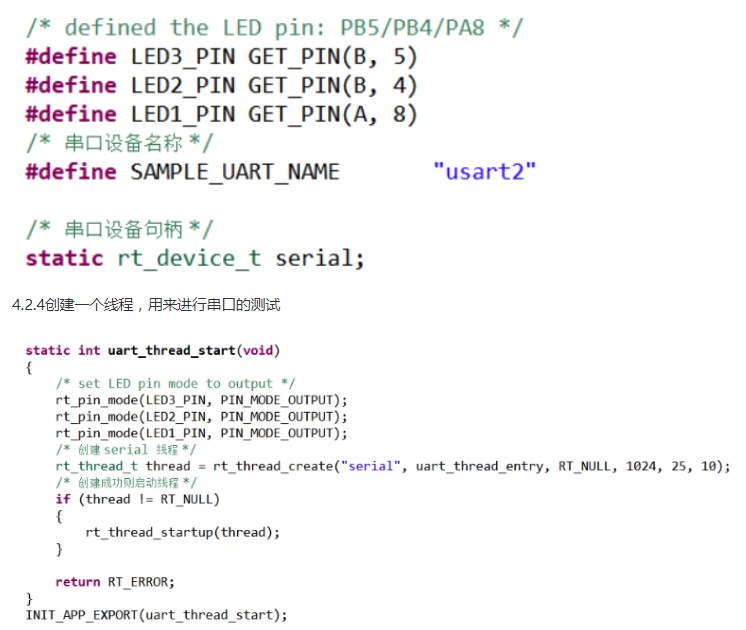
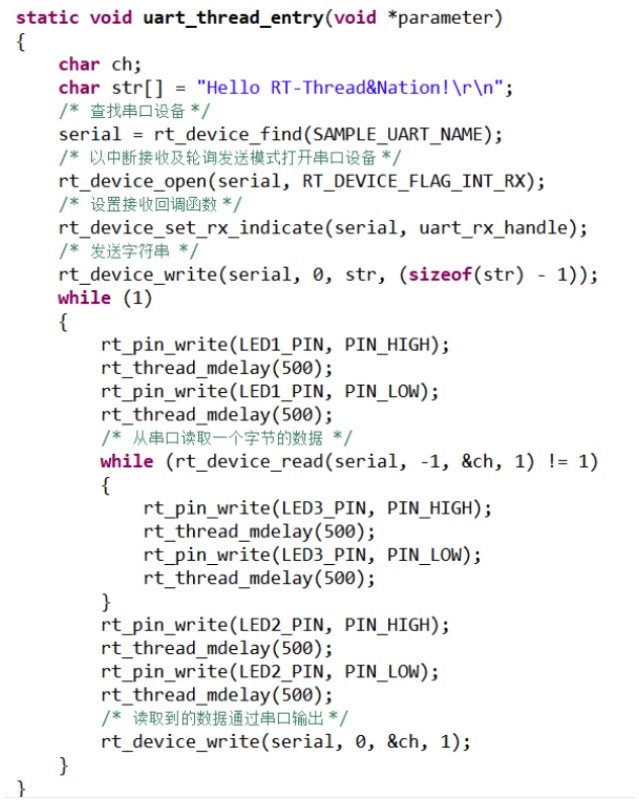
4.2.5進行串口測試代碼的編寫
.1初始化完成后,串口打印語句“Hello RT-Thread&Nation!”
.2等待讀取數據時,LED3(綠燈)閃爍;
.3讀取到數據時,LED2(藍燈)閃爍;
.4數據發送完成時,LED1(紅燈)閃爍
-
多處理器
+關注
關注
0文章
22瀏覽量
8962 -
編解碼器
+關注
關注
0文章
266瀏覽量
24262 -
數據寄存器
+關注
關注
0文章
33瀏覽量
7778 -
UART接口
+關注
關注
0文章
124瀏覽量
15318 -
RT-Thread
+關注
關注
31文章
1300瀏覽量
40264
發布評論請先 登錄
相關推薦
N32L43XCL-STB開發板硬件使用手冊
N32L40XCL-STB開發板硬件使用手冊

N32L40XCL-STB 開發板模塊評測任務大挑戰
N32L40XCL-STB開發板模塊評測任務大挑戰之UART
N32L40XCL-STB開發板模塊評測任務大挑戰-測試CAN





 工商網監
工商網監
評論