 基于pid控制方法的操控遙控飛機實例
基于pid控制方法的操控遙控飛機實例
做控制時,大家經常會有這樣的感受“代碼很豐滿,現實很骨感”,這是因為將計算機指令轉移到實際硬件時,由于物體的慣性以及各種非理想化的因素影響,往往會出現實際與預期不符合的情況。
這篇文章將以“操控遙控飛機從地面飛到10米高度并懸停”為例子,用最通俗易懂的方式,讓你理解PID。在這個問題中,我們假設加速度是可以直接調控的(實際生活中往往也是這樣),因此,我們輸入的量為加速度的大小和方向(正負),而我們最終想要得到的結果就是高度穩定在10米。
首先我們來講控制方法:
控制方法主要分為“開環控制”和“閉環控制”,這兩種控制方法的簡單理解為:
開環控制:計算出飛機從地面到10米高度所需要的加速度以及作用時間,然后將其編寫為一條固定的指令,“一次執行,全過程受益”。
閉環控制:在飛機飛行的過程中,系統時刻關注飛機的狀態,并做出相應的調整。而PID控制就是最常用的閉環控制。
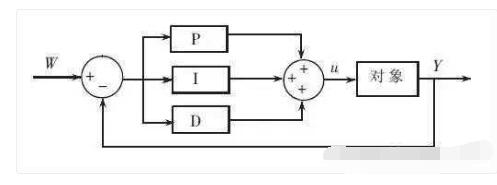
PID原理
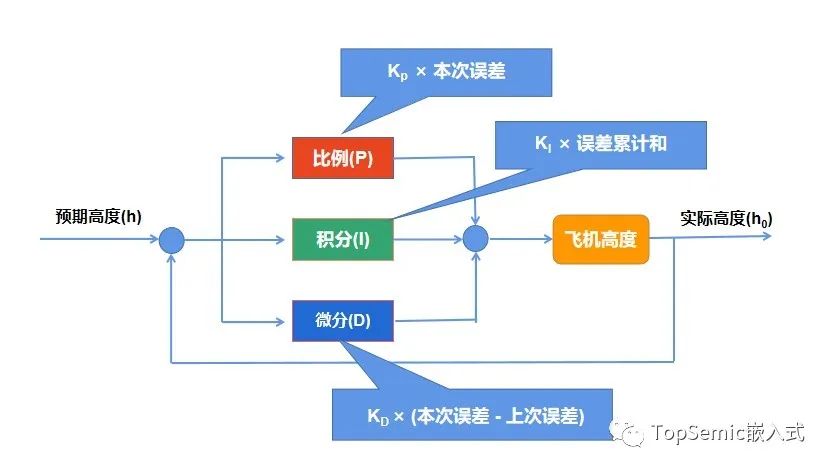
一講到原理,很多人都會搬出PID公式,數學較好或者學過自控的人還好,要是遇見一個半路轉行做控制的,看見“微分”和“積分”,頭都大了。其實,由于生活中信號采樣具有一定的間隔,因此我們經常遇見的都是離散信號的控制,只需要讀懂下圖即可:
實踐出真知(python實現PID)
3.1 導入包
`importtime` `importmatplotlib.pyplotasplt`
3.2 PID實現
#實現一個PID控制器 classPIDController: def__init__(self,kp,ki,kd): """ 初始化PID控制器 參數: kp(float):比例系數 ki(float):積分系數 kd(float):微分系數 """ self.kp=kp#比例系數 self.ki=ki#積分系數 self.kd=kd#微分系數 self.prev_error=0#上一次的誤差 self.integral=0#誤差積分值 defcalculate(self,setpoint,current_value): """ 計算PID控制器的輸出 參數: setpoint(float):設定值(目標值) current_value(float):當前值(被控制的系統當前狀態) 返回: output(float):控制器的輸出 """ error=setpoint-current_value#計算誤差 self.integral+=error#更新誤差積分 derivative=error-self.prev_error#計算誤差導數 output=self.kp*error+self.ki*self.integral+self.kd*derivative #計算控制輸出,包括比例、積分和微分部分 self.prev_error=error#保存當前誤差作為下一步的上一次誤差 returnoutput#返回控制器的輸出
3.3 飛行器模擬
#飛行器模擬 classAircraftSimulator: def__init__(self): self.height=0#飛行器初始高度為0 self.velocity=0#飛行器初始速度為0 defupdate(self,throttle,time_step): """ 更新飛行器狀態:高度和速度 參數: throttle(float):油門輸入,控制引擎輸出的力量 time_step(float):時間步長,模擬器更新的時間間隔 """ acceleration=throttle-0.1*self.velocity #根據簡化的動力模型計算飛行器的加速度 #加速度等于油門輸入減去速度的一部分,這是簡化的模型 self.velocity+=acceleration*time_step #根據加速度更新速度 #新速度等于當前速度加上加速度乘以時間步長 self.height+=self.velocity*time_step #根據速度更新飛行器的高度 #新高度等于當前高度加上速度乘以時間步長
3.4 主函數與繪圖
#主函數 defmain(): #PID參數 kp=5.0 ki=0.1 kd=10 #初始化PID控制器和飛行器模擬 pid_controller=PIDController(kp,ki,kd) aircraft_simulator=AircraftSimulator() target_height=10.0 time_step=0.1 total_time=20#總模擬時間增加到20秒 current_time=0.0 #存儲時間和高度數據的列表 time_data=[] height_data=[] #模擬循環 whilecurrent_time
實驗與參數理解
PID的控制經常會涉及到KP、KI、KD三個參數的調節,如果盲目調節則會花較長時間,接下來我們將用直觀實驗來理解以下幾個參數的具體含義。
4.1 比例環節
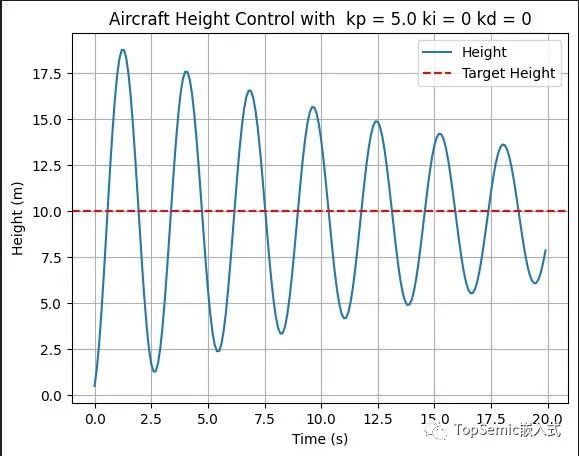
計算公式為KP × 誤差,具體的含義即為誤差越大,值越大。這一點是非常直觀的,誤差越大則說明偏離預期值越遠,我們要加大“油門”,快速調整!以下是當KI、KD為0,只有KP=5的測試結果:
從圖中我們可以看到雖然慢慢的想10收斂,但由于誤差越大,其“油門”越大,就像是一個“莽夫”,盡管每次都在調整,但總是用力過猛!
4.2 微分環節
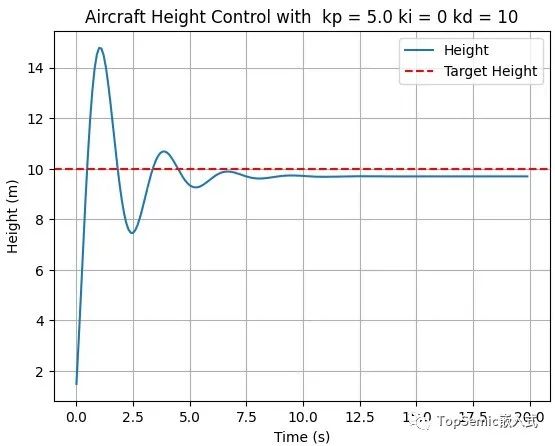
計算公式為KD × (本次誤差 - 上次誤差),對于這個公式,我們可以理解為用來中和“用力過猛”。以下是當KP=5、KD=10、KI=0的測試結果:
顯然,這個結果要比上次好很多,但始終低于10,這是因為我們在模擬中加入了一個干擾條件:
#添加擾動 disturbance=-1.5 control_signal+=disturbance
因此,要想消除這個干擾,就需要積分環節的加入。
4.3 積分環節
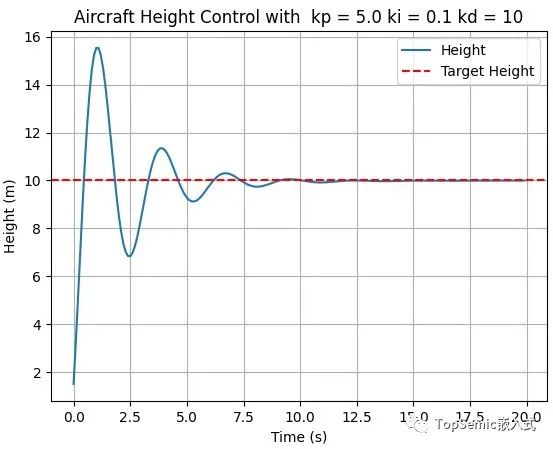
積分環節的公式為KI × 誤差累計和,用官方的語言來說,用來調整“穩態誤差”,其實,所謂的穩態誤差就可以理解為“一直存在的誤差”,也就是在本次實驗中加入的持續干擾!以下是當KP=5、KD=10、KI=0.1的測試結果:
從這次的測試中,我們看出,得到了幾乎完美的結果!
總結
對于PID參數調節,認準3個點:
P:大力出奇跡
I:消除持續存在的誤差
D:“中和”用力過猛,減少波動
責任編輯:彭菁
-
硬件
+關注
關注
11文章
3349瀏覽量
66319 -
PID
+關注
關注
35文章
1473瀏覽量
85629 -
PID控制
+關注
關注
10文章
460瀏覽量
40148 -
代碼
+關注
關注
30文章
4803瀏覽量
68769 -
控制方法
+關注
關注
0文章
13瀏覽量
7650 -
遙控飛機
+關注
關注
1文章
16瀏覽量
8687
原文標題:如何用PID算法,操控無人機懸停?
文章出處:【微信號:TopSemic,微信公眾號:TopSemic嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于SLH89F5162的魚鷹遙控飛機設計
基于模糊PID控制的飛機液壓缸性能測試

PID操控的原理和特征說明





 工商網監
工商網監
評論