 xilinx ZYNQ7000系列基本開發流程之PS端
xilinx ZYNQ7000系列基本開發流程之PS端
這篇文章記錄ZYNQ7020的PS端的基本開發流程,關于PL端的開發流程,參考之前文章,這里放個超鏈接。
本篇文章,以配置一個PS端的UART外設,并打印一句話《hello ZYNQ7020,Author:liushuhe 2020.11.26》來演示
ZYNQ7020的基本開發流程,本篇文章需要一點點的C語言知識,不會也不影響實驗的,跟著步驟做就行了。
一、任務分工
ZYNQ芯片分為PL和PS,PS端的IO分配相對是固定的,不能任意分配,雖然PS端的ARM是硬核,但是在ZYNQ當中也要將ARM硬核添加到工程當中才能使用,FPGA工程師負責把Vivado工程搭建好,提供好硬件給軟件開發人員,軟件開發人員便能在這個基礎上開發應用程序 ,軟件開發人員,不用關心FPGA的部分。
二、FPGA工程師搭建硬件平臺
我們這里演示搭建一個帶UART和arm A9處理器的硬件平臺
1.1、建立vivado工程
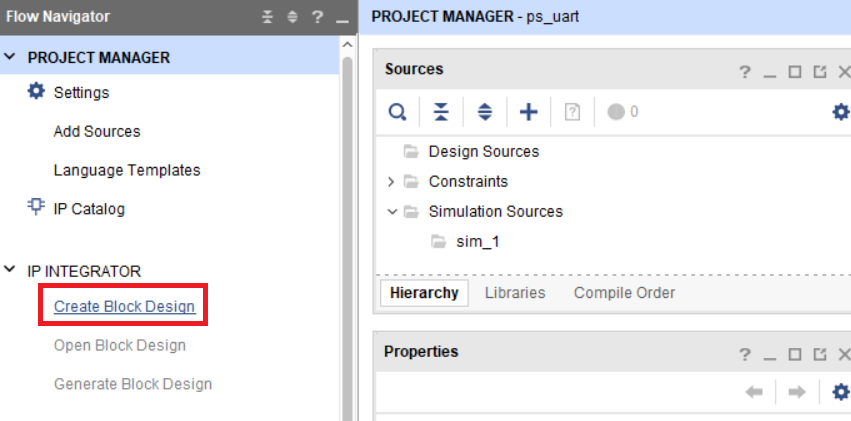
創建一個“ps_uart”的工程,具體過程,參考我文章開頭超鏈接文章;
1.2、點擊“Create Block Design”,創建一個Block設計,也就是圖形化設計
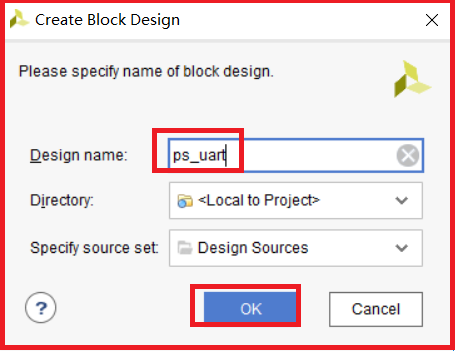
1.3、“Design name”可以不修改,我改成ps_uart便于識別
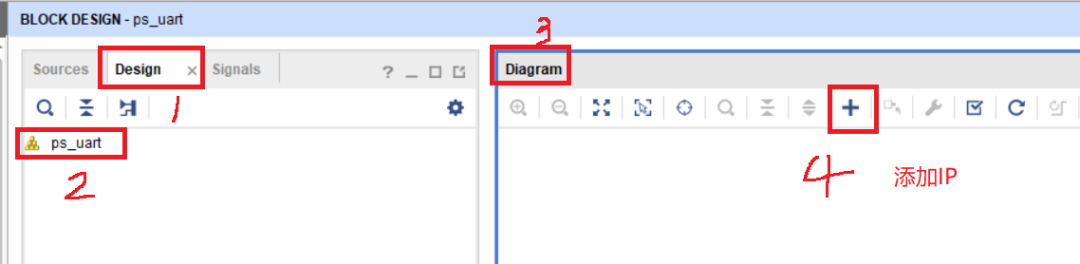
1.4、點擊“Add IP”快捷圖標
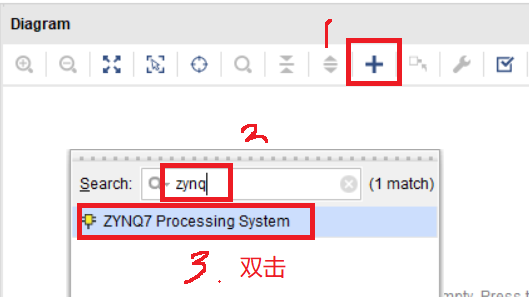
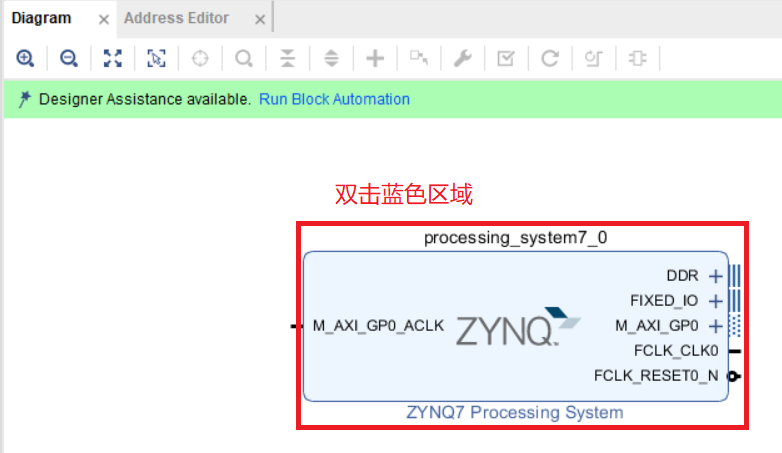
1.5、搜索“zynq”,在搜索結果列表中雙擊“ZYNQ7 Processing System
1.6、雙擊Block圖中的“processing_system7_0”(直接雙擊藍色區域),配置相關參數
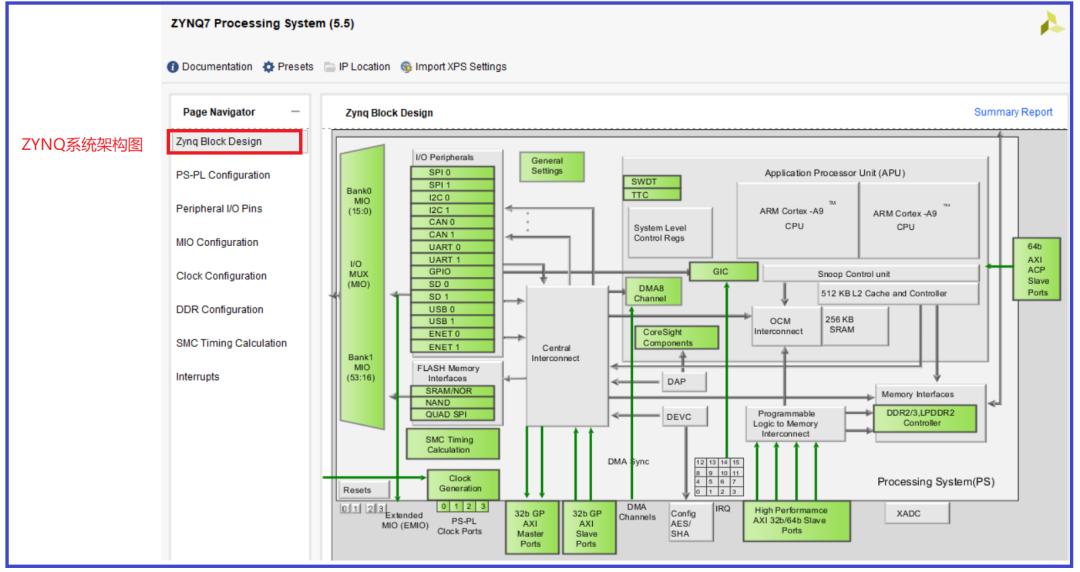
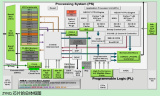
1.7、首先出現的界面是ZYNQ硬核的架構圖,可以很清楚看到它的結構,可以參考 官方文檔,在官網搜索ug585 即可
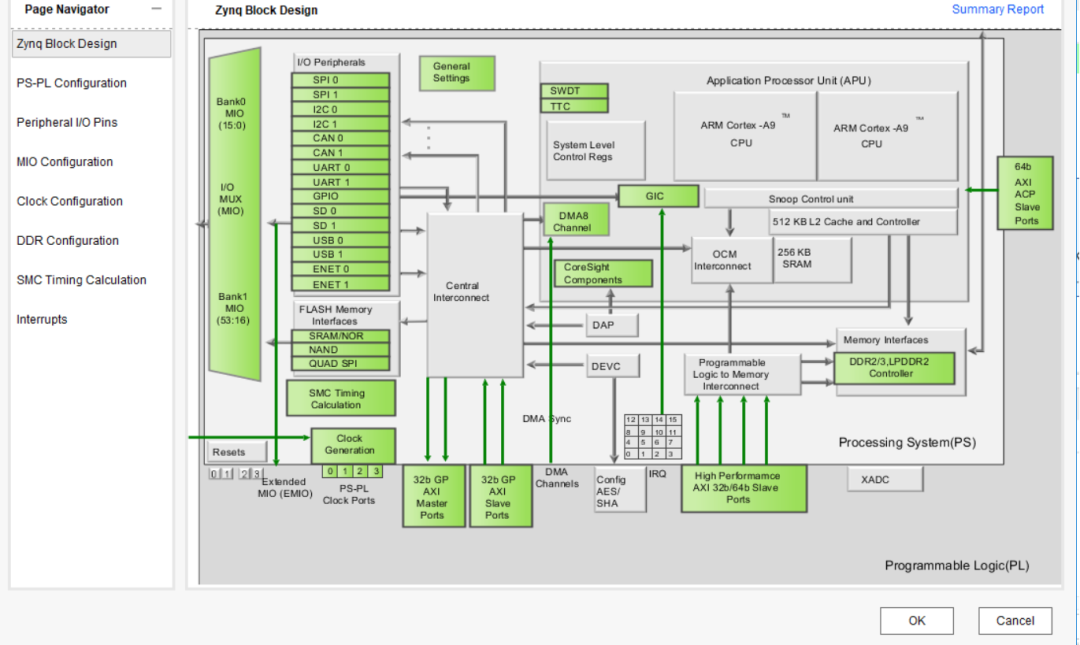
1.8、圖中綠色部分是可配置模塊,可以點擊進入相應的編輯界面
1.9、也可以在左側的窗口進入編輯 ,下面分別介紹左側選項代表的功能;
2.0、Zynq 塊設計參數配置,單擊綠色塊右下角,可以進行參數配置
2.1、PS-PL Configuration 配置界面,主要是進行PS與PL之間接口的配置,主要是AXI接口,這些接口可以擴展PL端的AXI接口外設
核。
2.2、我們這篇文章是PS開發流程,關于PS-PL Configuration 配置在這里保持默認,在后面的實驗中我再補充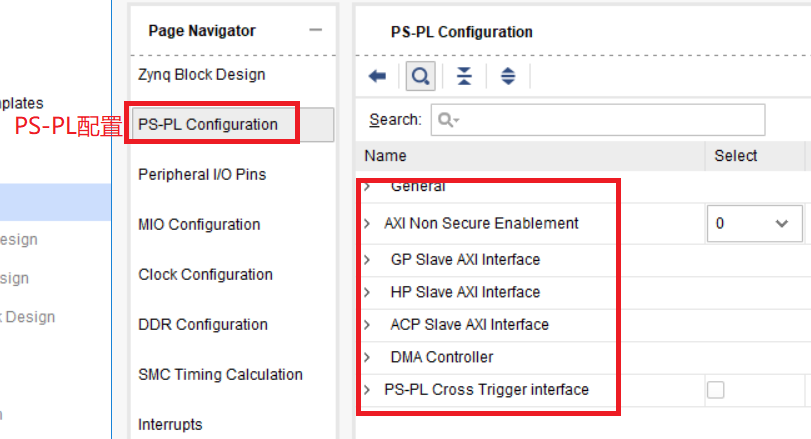
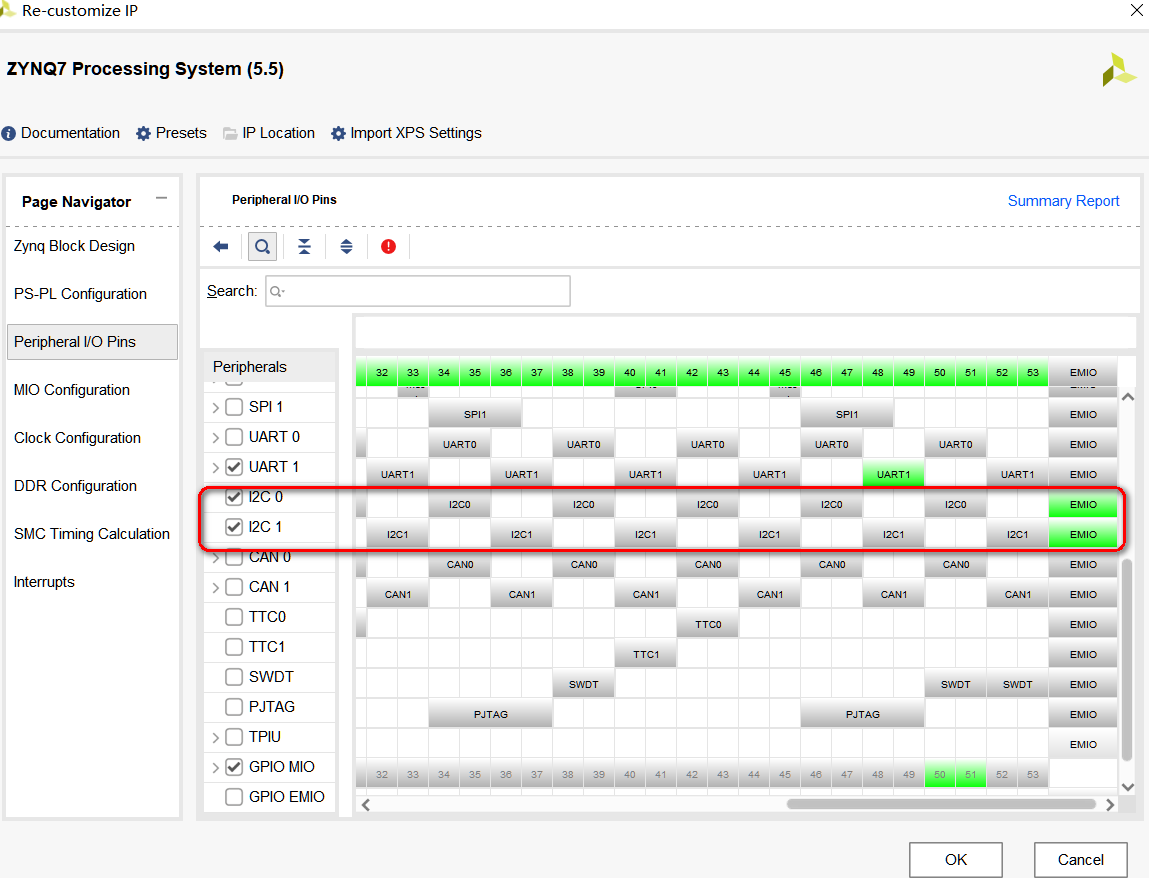
2.3、外設配置,ZYNQ的PS端外設很多是復用的 ,同一引腳可以配置為不同的功能
zynq內部只有2個串口,UART0、UART1、我們看UART0可以接在(10、11)/(14、15)/(18、19)/(22、23)/(26、27)
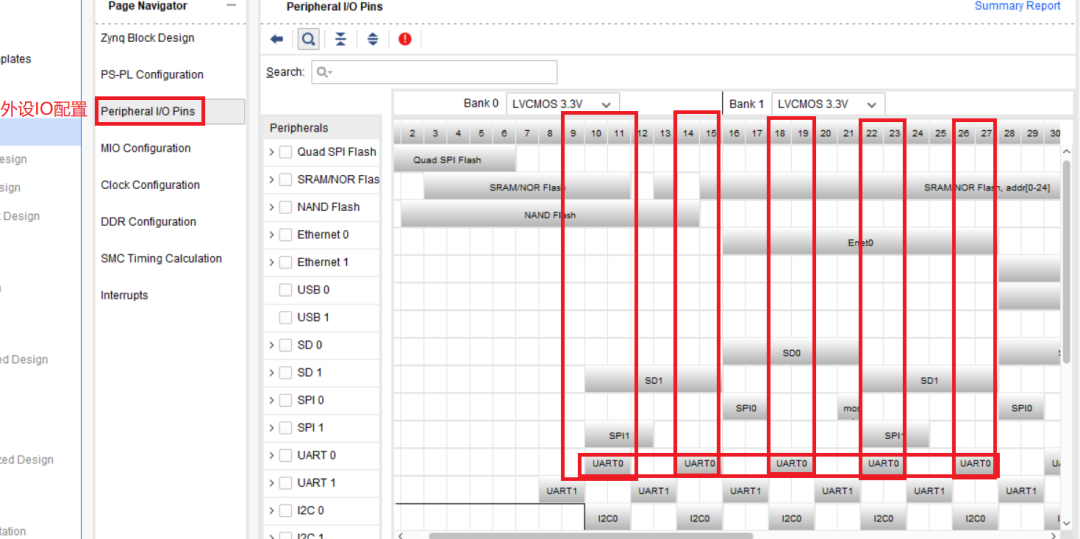
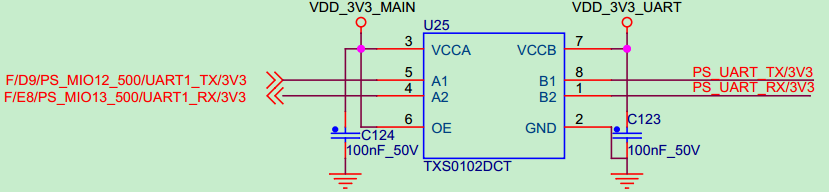
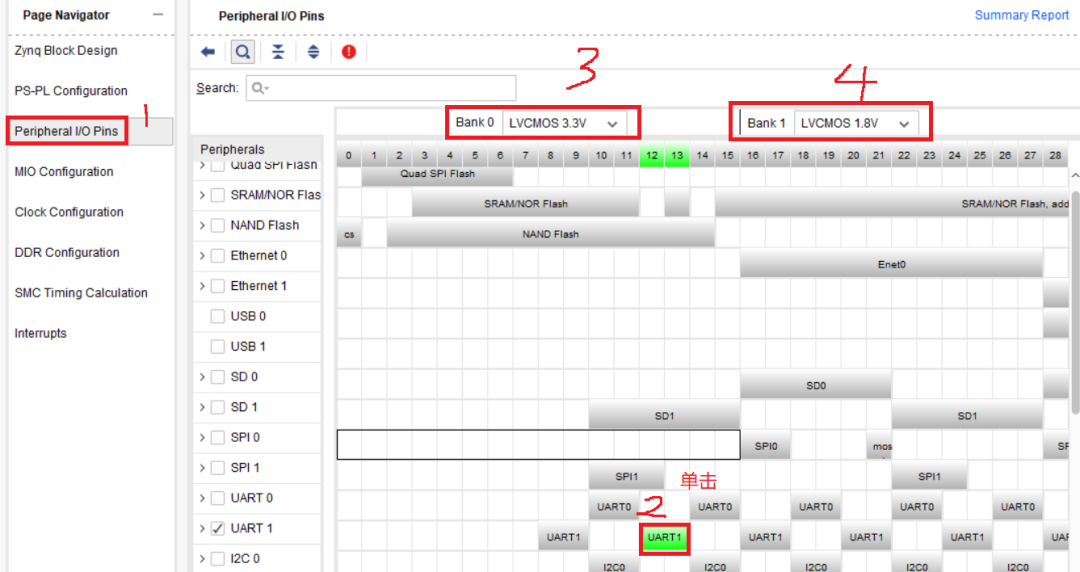
2.4、配置串口,我們的ps_uart需要一個串口來打印消息,查看ZYNQ7020開發板的原理圖
從原理圖看出,ZYNQ的PS端的串口,連接的是MIO12、MIO13端口,并且電源是3.3v
2.5、從I/O分配看,MIO12、MIO13是串口1,在MIO12、MIO13引腳對應串口上單擊,會看見該模塊變為綠色,即代表分配成功
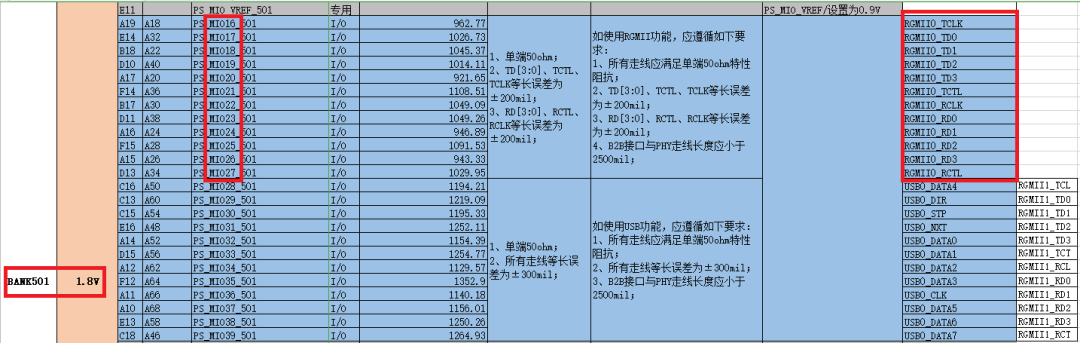
關于BANK0、BANK1的電壓,由于創龍沒有給核心板的原理圖,但是給了一個WORD的描述文檔,大家也要熟悉這個方式
國內很多廠家都是這樣,屬于技術保密
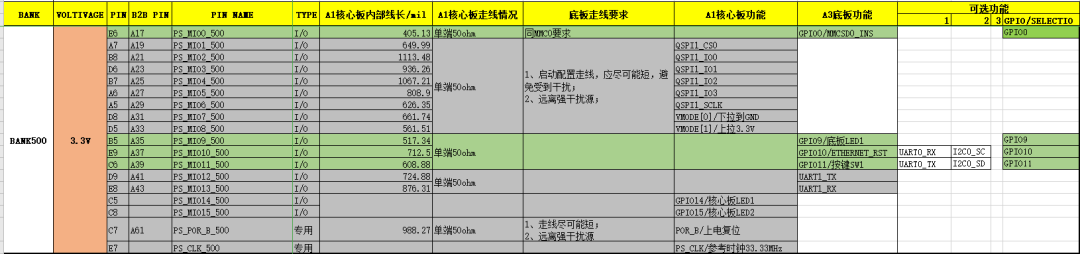
按照上述表格分配UART1電壓和引腳
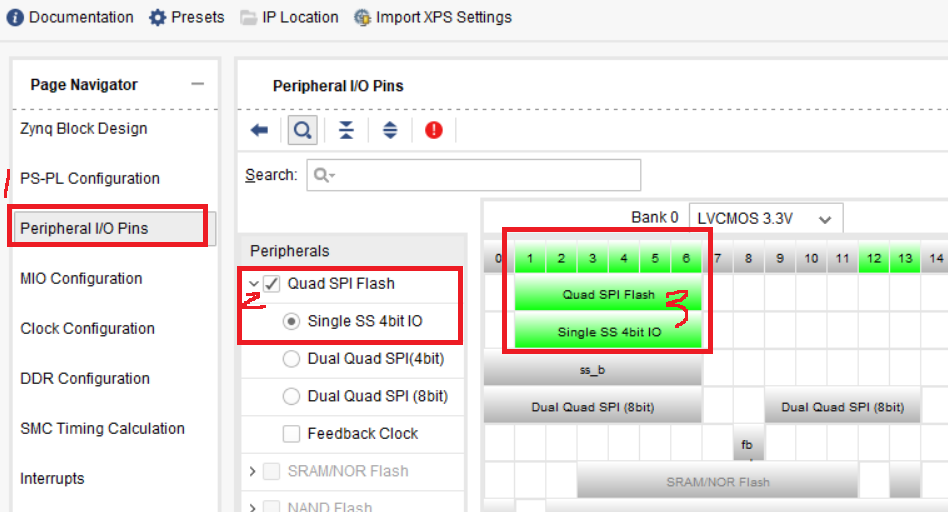
2.6、配置QSPI,QSPI可以作為ZYNQ的啟動存儲設備,ZYNQ可以通過讀取QSPI中存儲的啟動文件加載ARM和FPGA
從核心板word表格和創龍給的例程,得知我們選擇Quad SPI Flash為Single SS 4bit IO
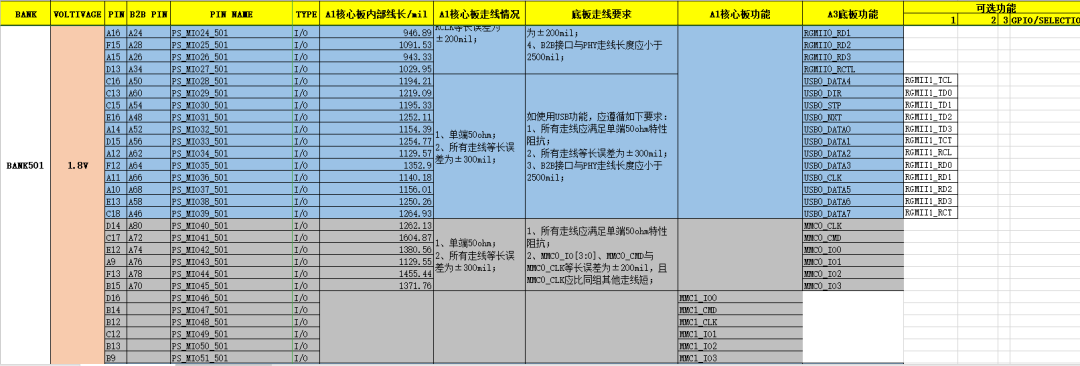
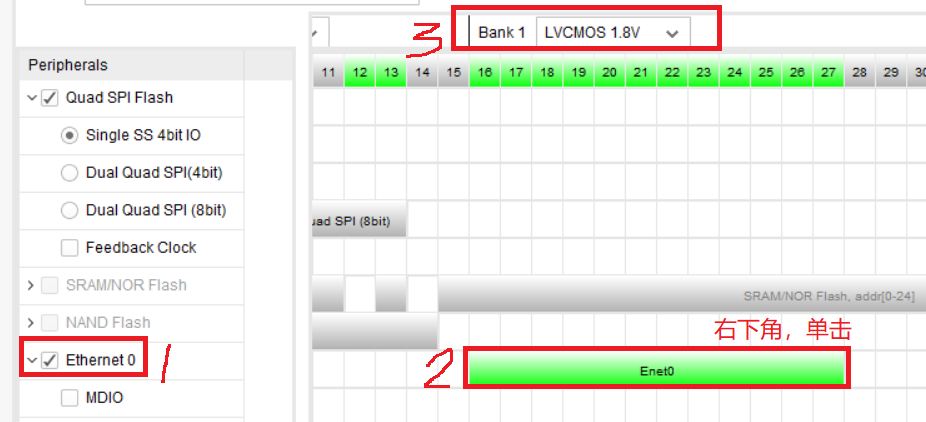
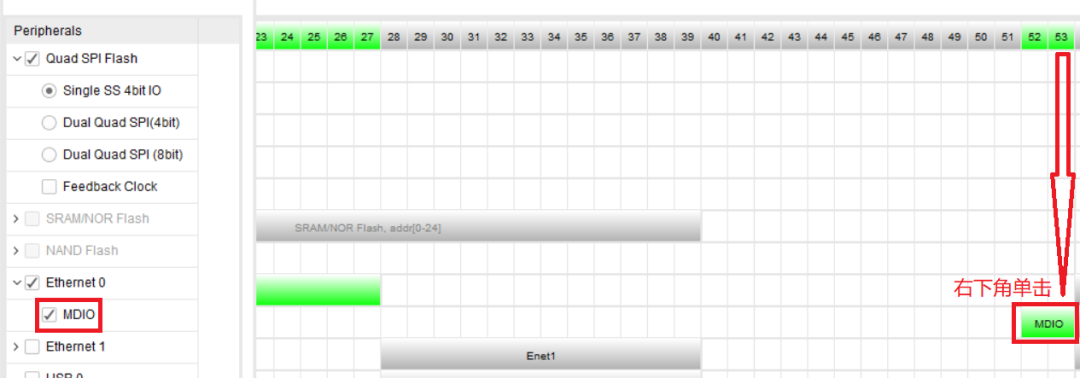
2.7、配置以太網,在PS端設計有以太網接口
1、根據原理圖選擇Ethernet 0到MIO16-MIO27
電壓是1.8v
2、配置PHY寄存器配置接口,選擇MDIO并配置到MIO52-MIO53

2.8、配置USB0到MIO28-MIO39


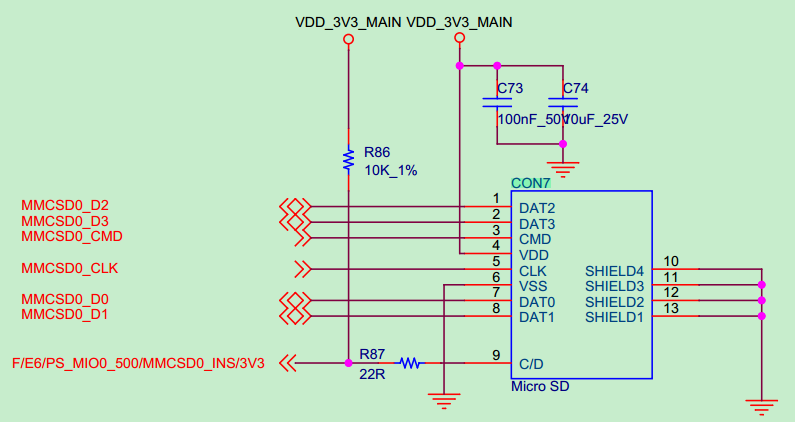
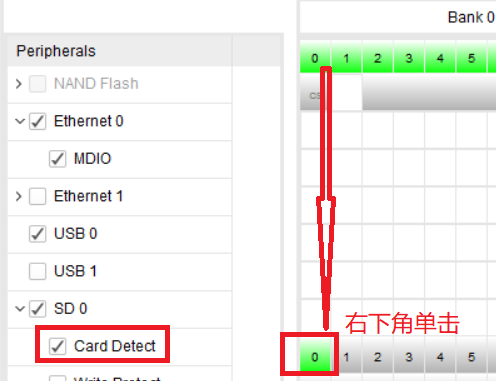
2.9、ZYNQ還可以SD卡啟動
查看底板原理圖,選擇 SD 0,配置到 MIO40-MIO45,選擇Card Detection MIO0,用于檢測 SD 卡的插入。
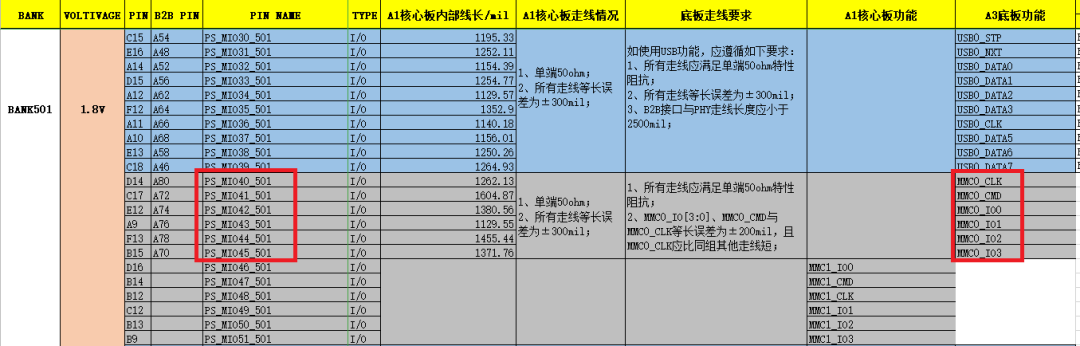
1、配置SD0
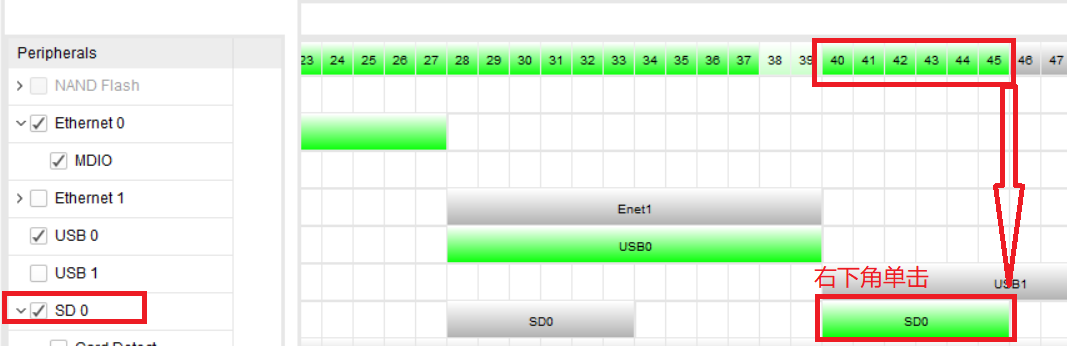
2、選擇Card Detection MIO0,用于檢測SD卡的插入
3.0、控制剩余未分配的MIO,用作GPIO ,打開GPIO MIO,PS便可以配置
1、雙擊GPIO MIO當出現打鉤的提示時,軟件會自動把我們未使用到的IO分配為GPIO
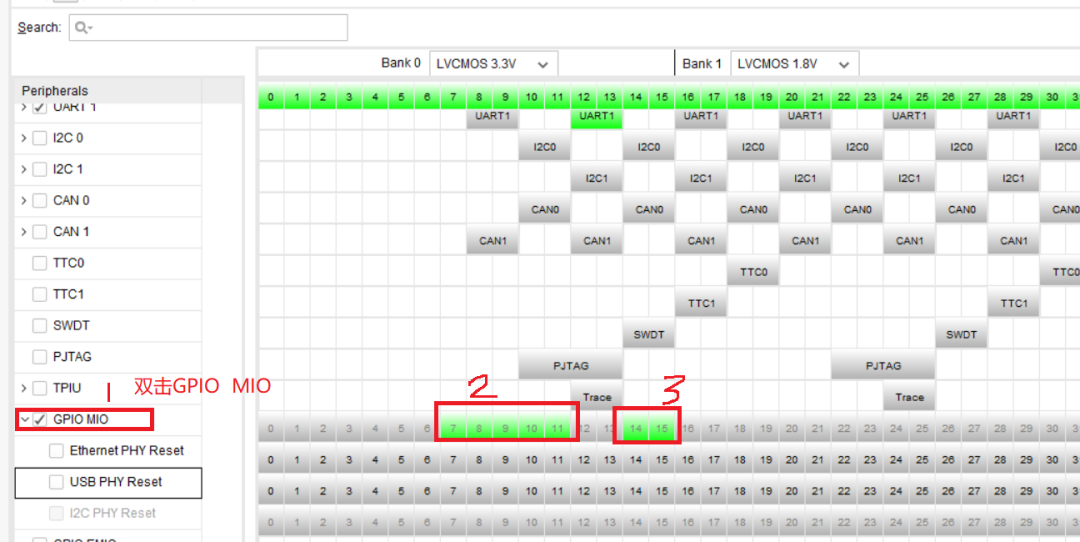
2、到這里引腳分配全部完成,如果以后做實驗需要配置其他外設,可以參考這個文章,作相應的修改即可
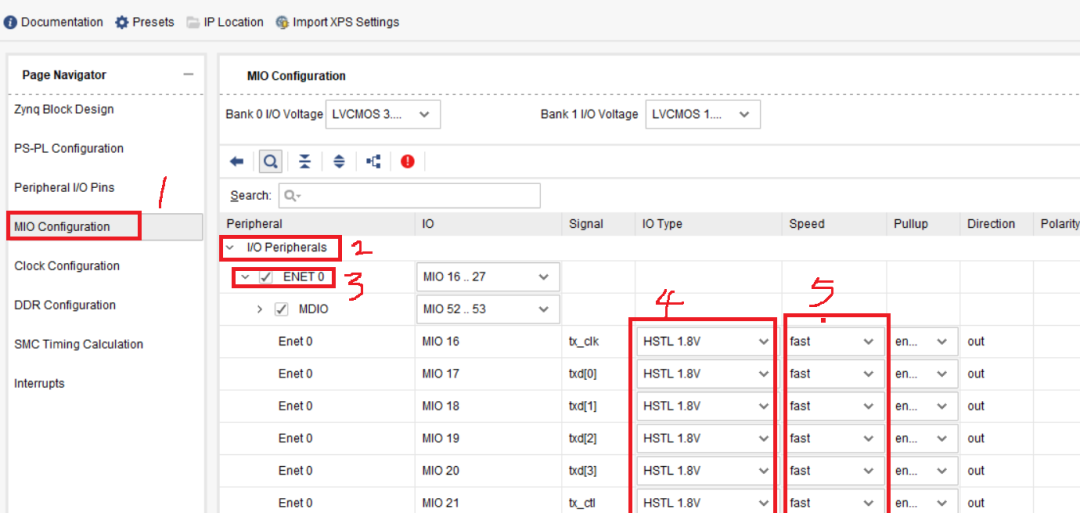
3.1、MIO配置
修改 Enet0的電平標準為 HSTL 1.8V, Speed 為 fast,這些參數非常重要,如果不修改,網絡可能不通。其他部分保持默認。
3.2、時鐘配置
在“Clock Configuration”選項卡中我們可以配置PS時鐘輸入時鐘頻率,這里默認是33.333333,和板子上一致,不用修改,
CPU 頻率改為 767Mhz,同時 PS 還可以給 PL 端提供 4 路時鐘,頻率可以配置,這里不需要,所以保持默認即可。
還有 PS 端外設的時鐘等也可以進行配置,這里保持默認。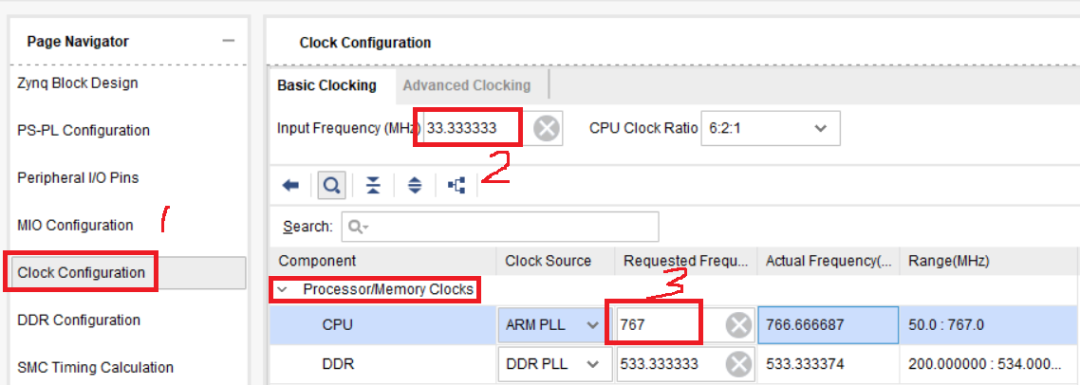
3.3、DDR3配置
在“DDR Configuration”選項卡中可以配置PS端ddr的參數
根據創龍的例程,內存芯片我們選擇《MT41K256M16 RE-125》,Effective DRAM Bus Width 選擇《32bit》
其他部分保持默認,點擊OK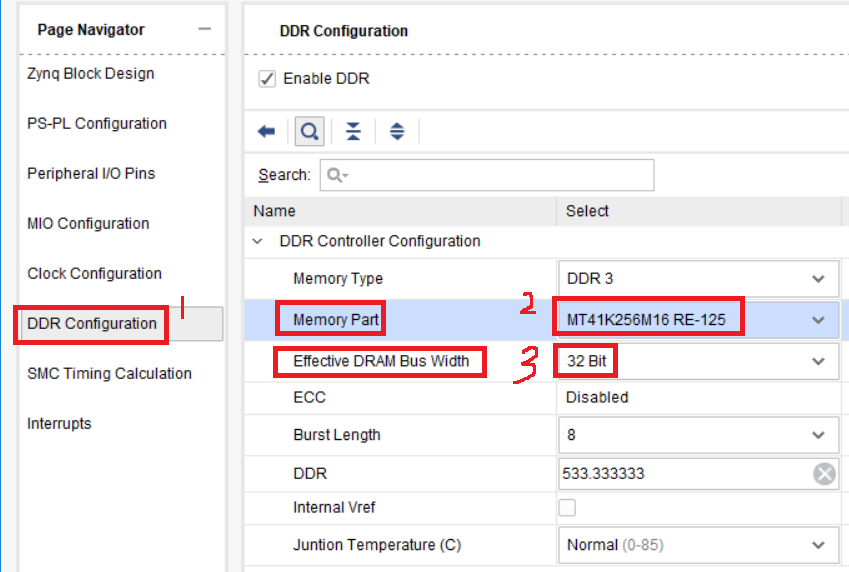
3.4、到這里ZYNQ核的配置完成,我們配置參數及導出硬件信息
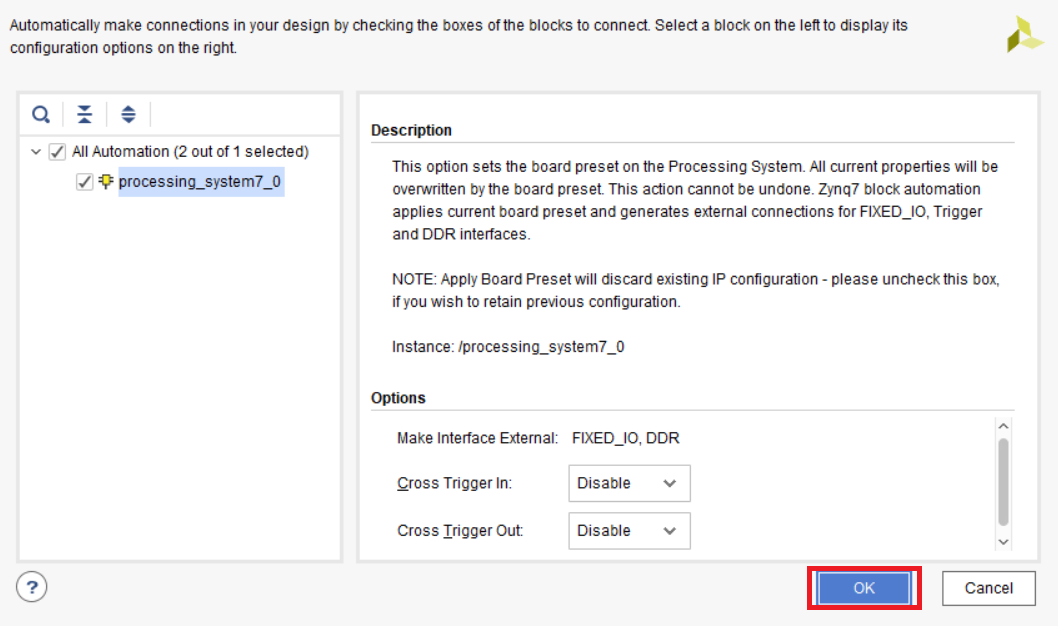
1、點擊“Run Block Automation”,vivado軟件會自動完成一些導出端口的工作
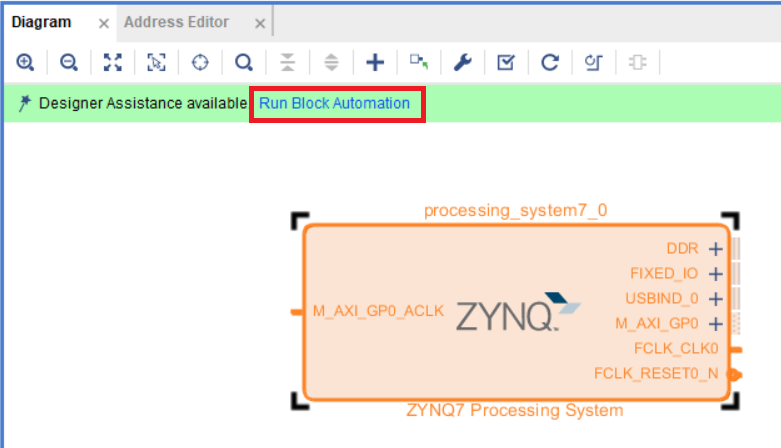
2、按照默認點擊“OK”
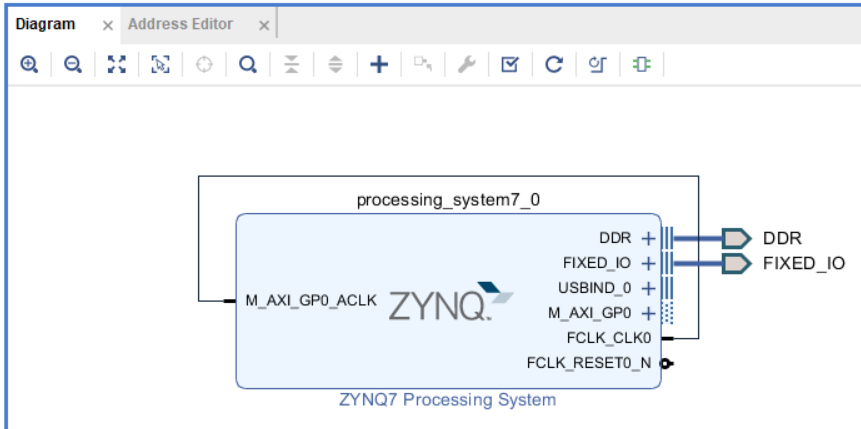
3、連接FCLK_CLK0到M_AXI_GP0_ACLK,按Ctrl+S保存設計
4、選擇Block設計,右鍵“Create HDL Wrapper...”,創建一個Verilog或VHDL文件,為ps_uart生成HDL頂層文件
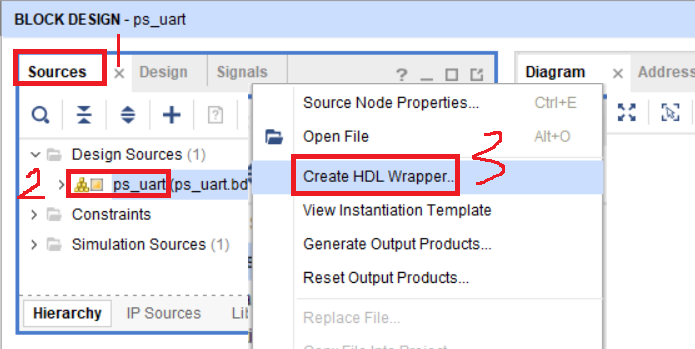
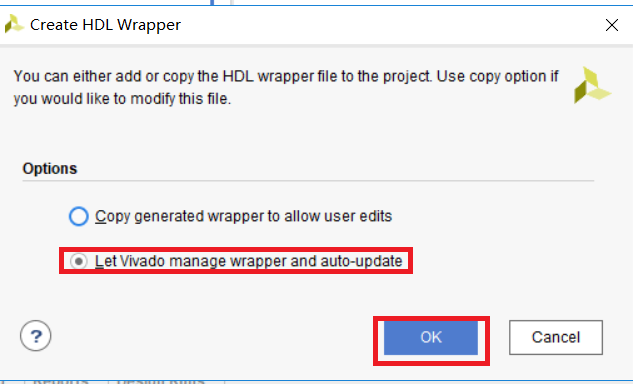
5、在彈出對話框,選擇讓vivado軟件自動更新 頂層文件
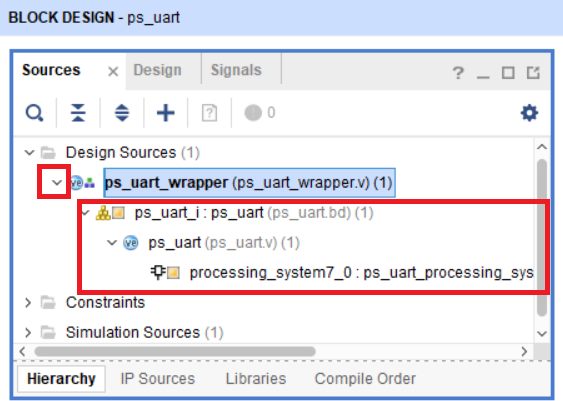
6、展開設計可以看到PS被當成一個普通IP來使用 ,之前生成那個頂層文件,其實就是為了把我們的硬件配置
生成一個IP核,供我們調用
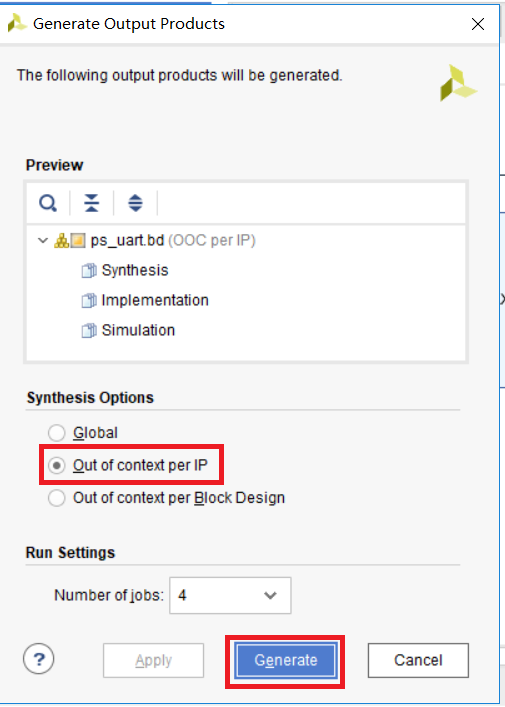
7、選擇block設計,右鍵“Generate Output Products”,此步驟會生成block的輸出文件,包括IP,例化模板, RTL 源文件, XDC 約束,第三方綜合源文件等等。供后續操作使用。
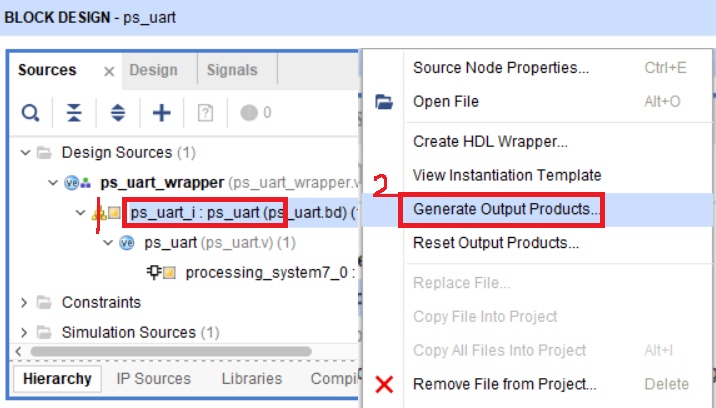
8、點擊“Generate”
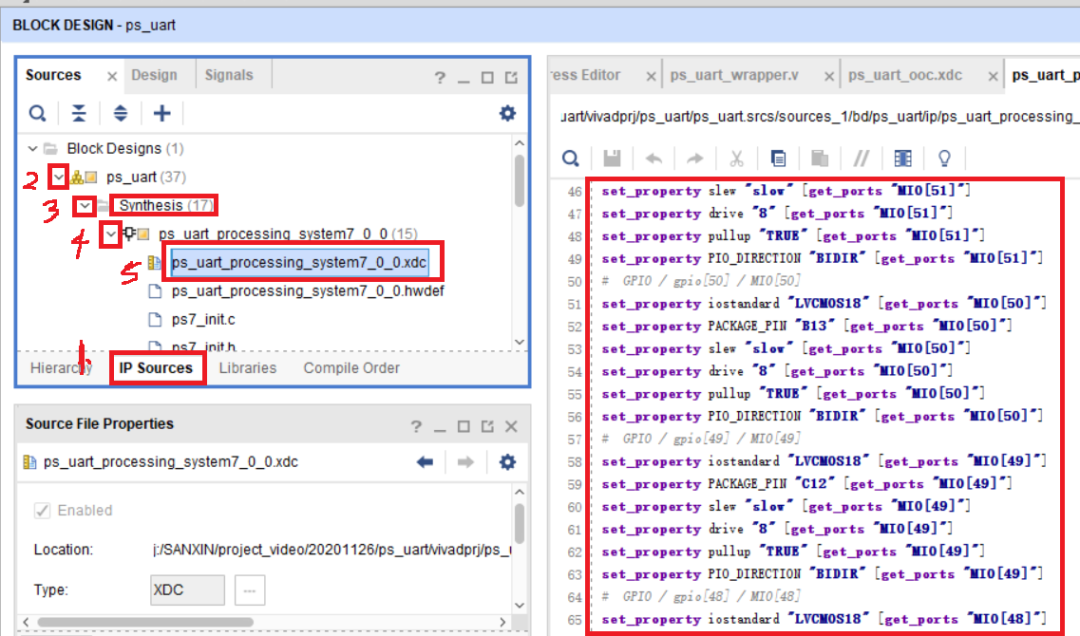
9、PS端的引腳不需要綁定 ,因為在生成的IP文件包含了PS端引腳分配的XDC文件
在IP Sources,Block Designs->ps_uart->Synthesis中,可以看到處理器的XDC文件,綁定了PS端的IO,因此不需要再新建XDC綁定這些引腳
10、在菜單欄“File -> Export -> Export Hardware...”導出硬件信息,這里就包含了 PS 端的配置信息。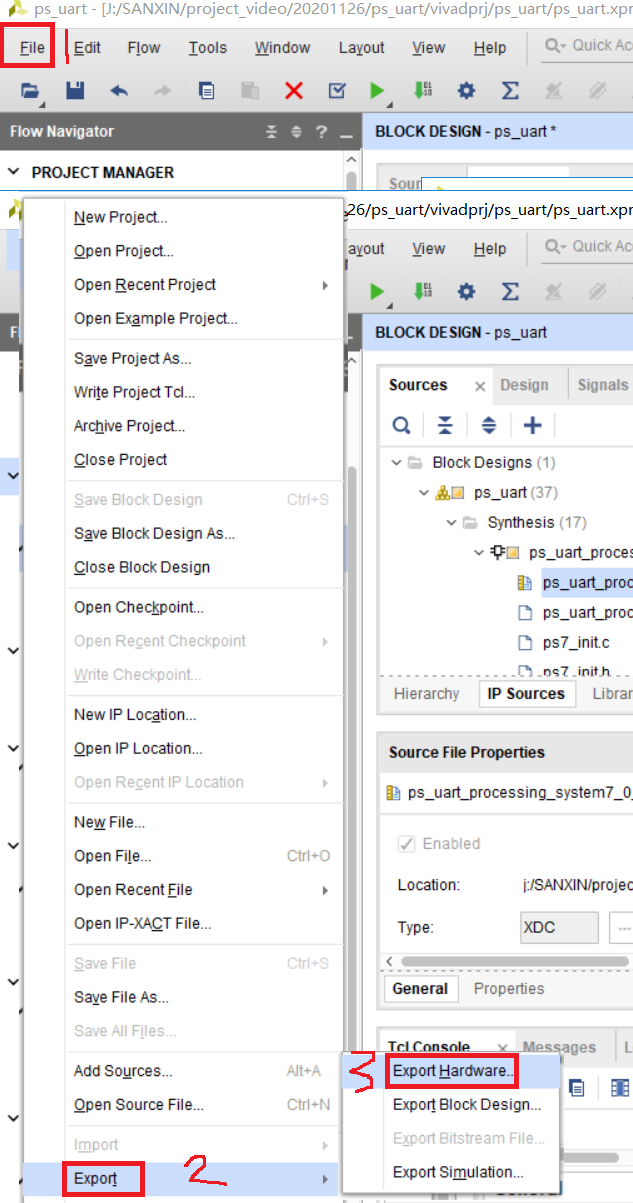
11、在彈出的對話框中點擊“OK”
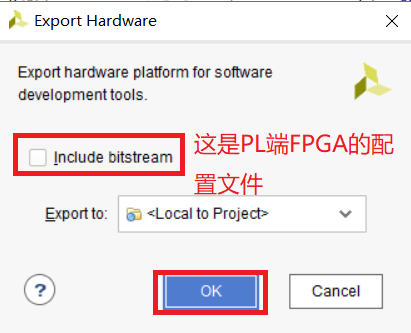
12、因為我們這個實驗僅僅是使用了PS的串口,不需要PL參與,這里就沒有使能“Include bitstream” ,關于PS-PL的聯合實驗,我會另寫一篇
13、此時會多出 xx.sdk 文件夾,并且有個 hdf 文件,這個文件就是這個文件就包含了 Vivado 硬件設計的信息,供軟件開發人員使用。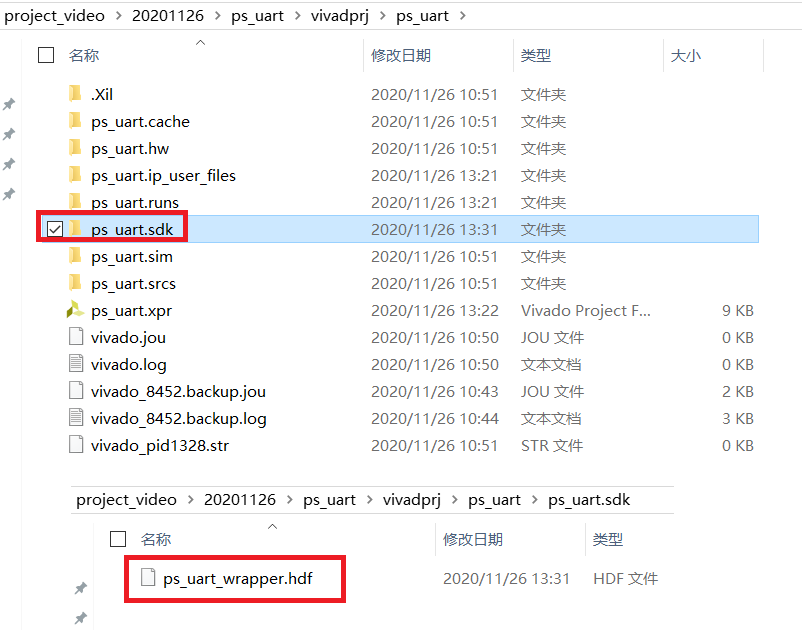
14、到此為止, FPGA 工程師工作告一段落,剩下的工作交給ARM軟件開發人員。

二、ARM軟件編寫C語言程序,在串口打印一句話《hello ZYNQ7020,Author:liushuhe 2020.11.26》
1、點擊Vivado菜單“File -> Launch SDK”,啟動SDK
2、在彈出的對話框選擇OK
3、啟動SDK后我們會看到一個文件夾,有一個名為"system.hdf”文件,這個文件就包含了
Vivado硬件設計的信息,可以給軟件開發使用,也可以看到 PS 端外設的寄存器列表。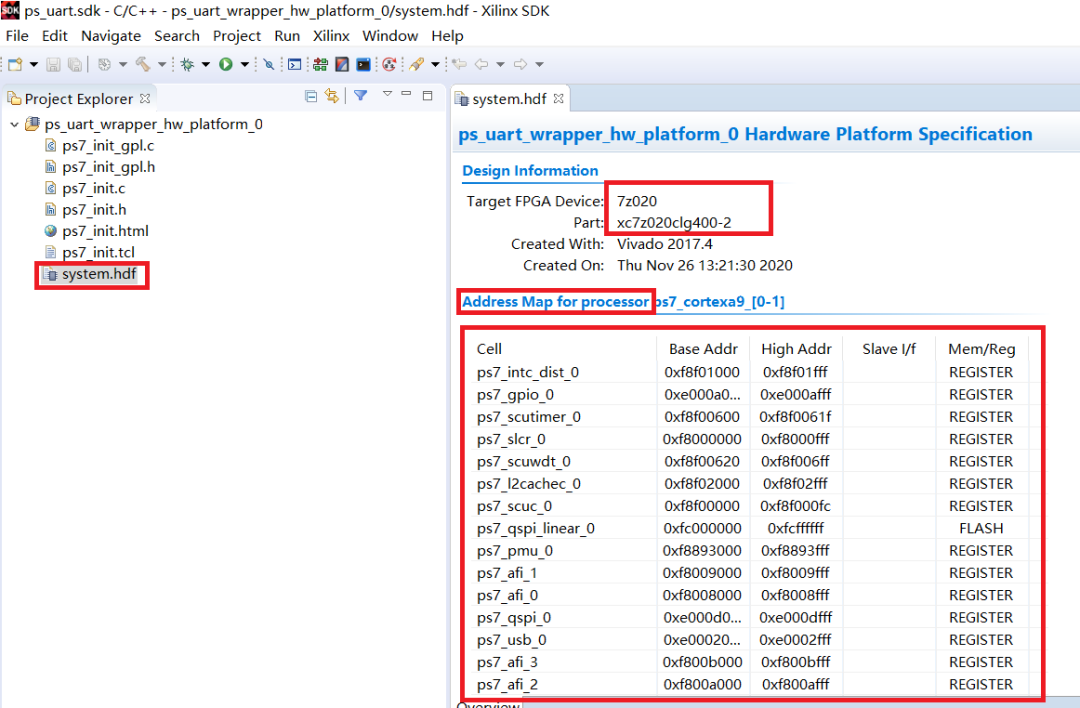
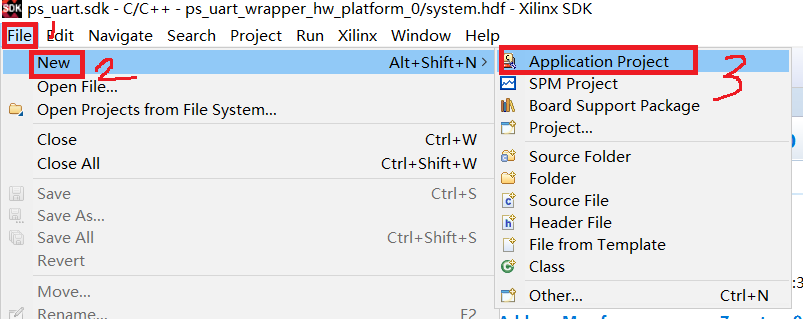
4、在SDK的菜單“New -> Application Project”,建立一個APP工程
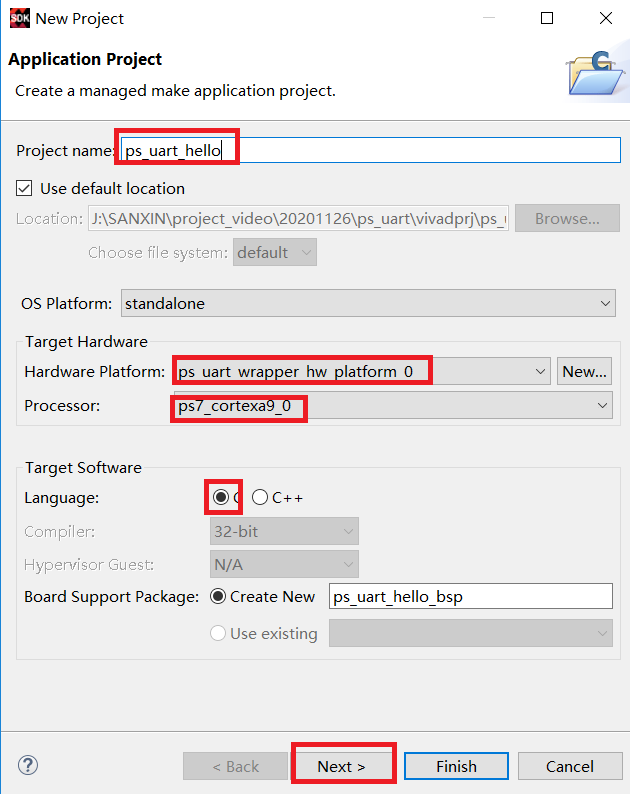
4、在彈出的對話框中,“Project name”填寫“ps_uart_hello”,硬件平臺選擇我們自己定義的ps_uart_wrapper_hw_platform
語言C、其他默認,點擊“Next”
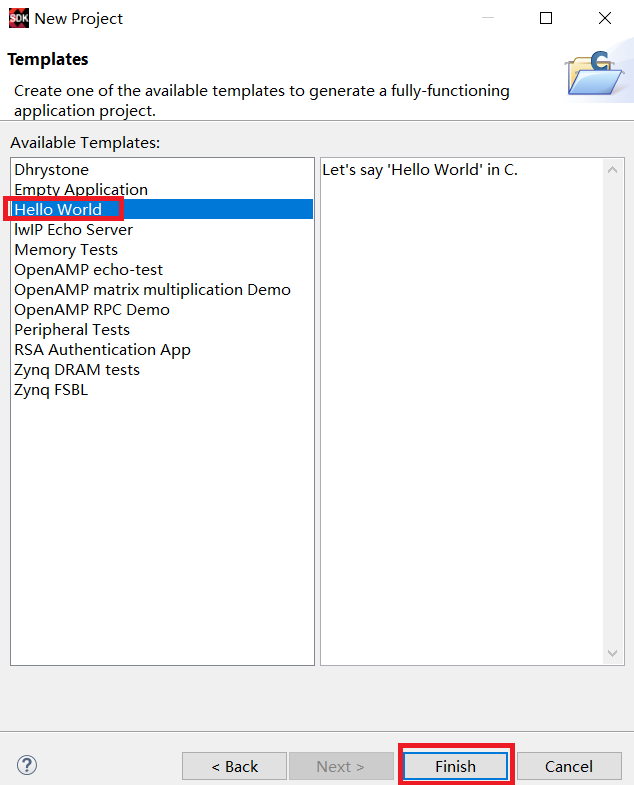
5、模板選擇《hello world》,點擊Finish
6、可以看到SDK創建了一個“ps_uart_hello”目錄,還有一個“ps_usrt_hello_bsp”的目錄,在“ps_usrt_hello_bsp”目錄中可以找到很多有用的信息,軟件開發人員比較清楚,BSP也就是Board Support Package板級支持包的意思,里面包含了開發所需要的驅動文件,用于應用程序開發。
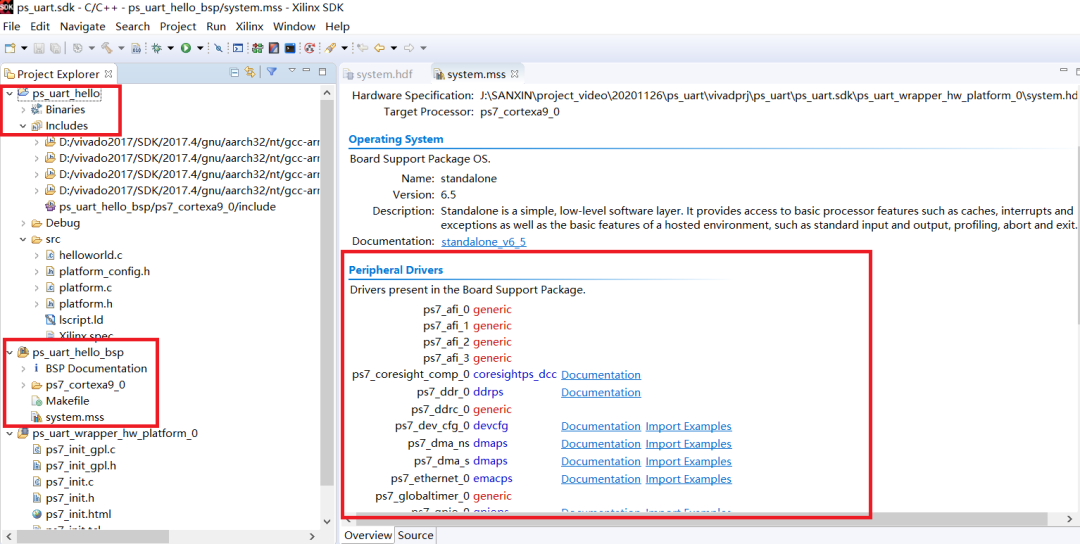
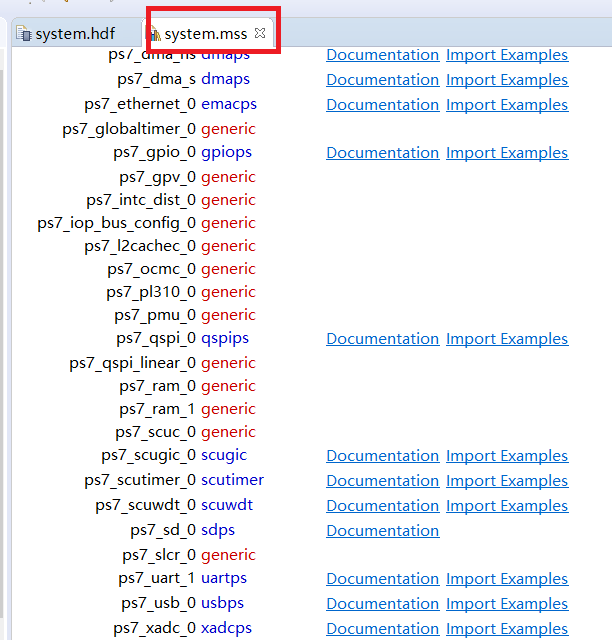
7、雙擊“system.mss”,還可以看到有些PS外設還提供了例程,這是用來了解學習這些外設的
第一手資料。驅動文檔說明可以在 Documentation 中找到。通過 Import Examples 引入官方
例子,加快學習。
8、連接JTAG線到開發板、UART的USB線到PC
9、打開串口終端調試工具,串口根據電腦的COM口設置,波特率設置為115200
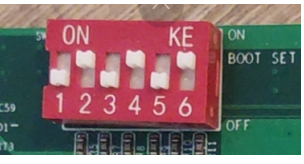
10、將開發板的啟動模式設置到JTAG模式
開發板設置撥碼為【010101(1~6 JTAG模式)】、【100101(1~6 QSPI模式)】、【101001(1~6 SD卡模式】
11、給開發板上電,準備運行程序
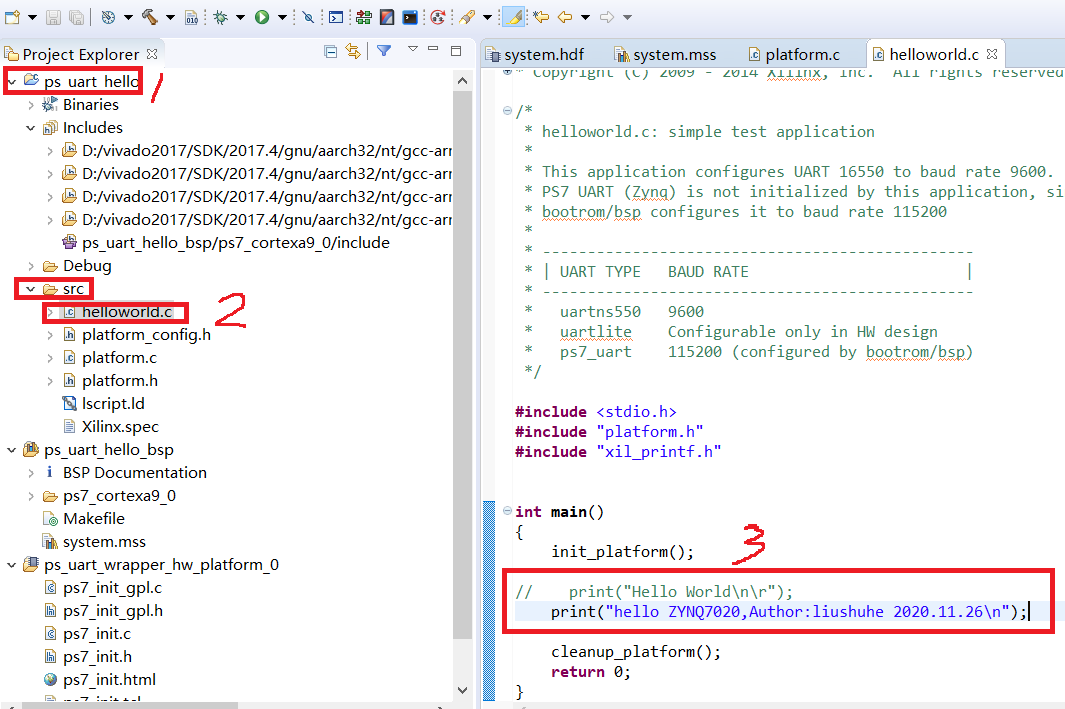
1、修改helloword.c,將printf打印修改為printf("hello ZYNQ7020,Author:liushuhe 2020.11.26 ");
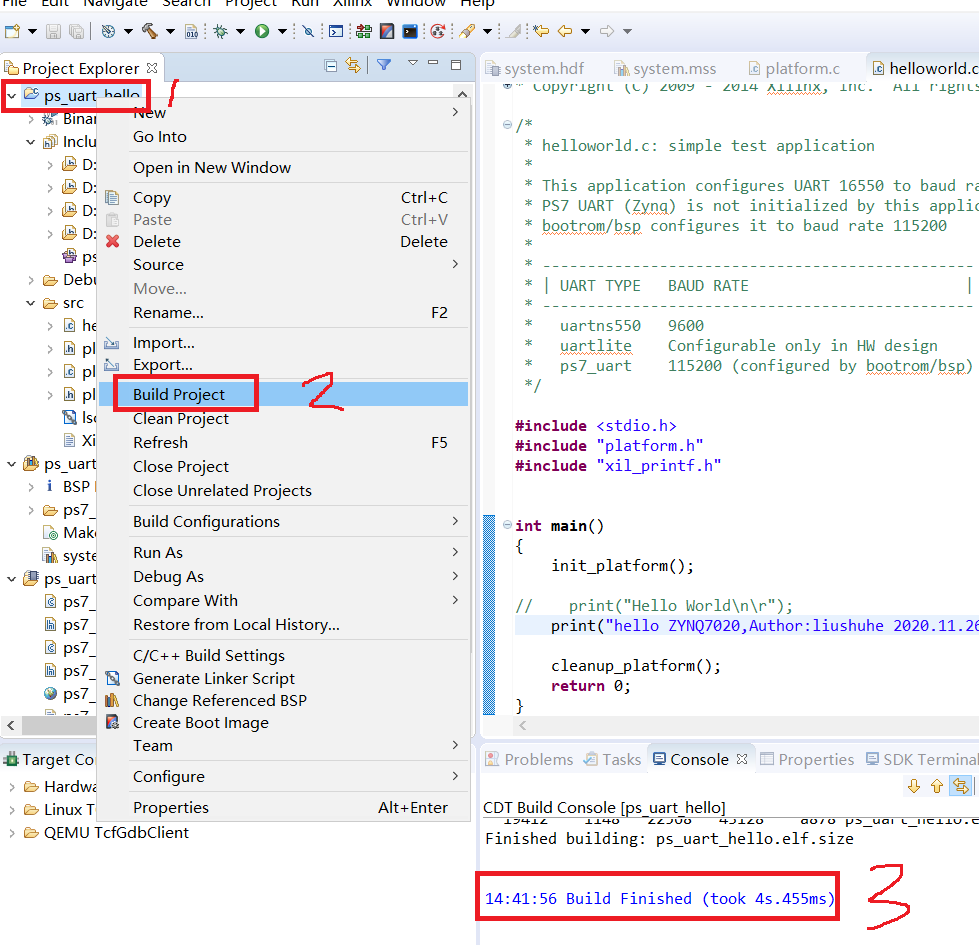
2、編譯代碼,右鍵單擊ps_uart_hello,在彈出的列表選擇Build Project,編譯完成可以看看沒有報錯
12、選擇“ps_uart_hello”,右鍵“Run as”,選擇第一個“Launch on Hardware(SystemDebuger)”,使用系統調試,直接運行程序。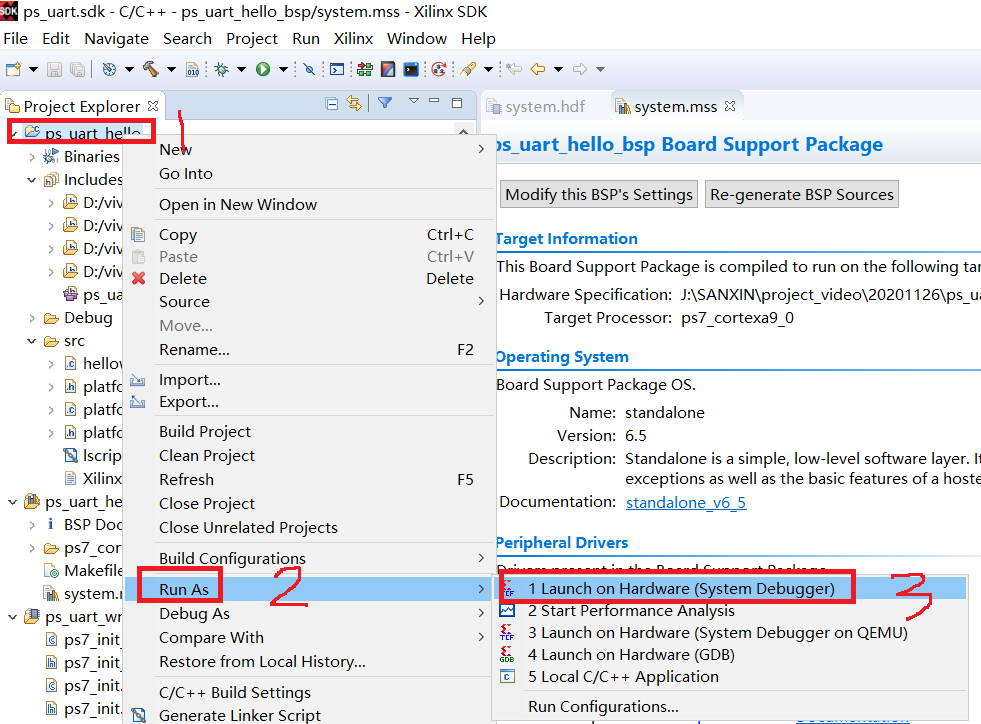
13、可以看到串口沒有任何輸出
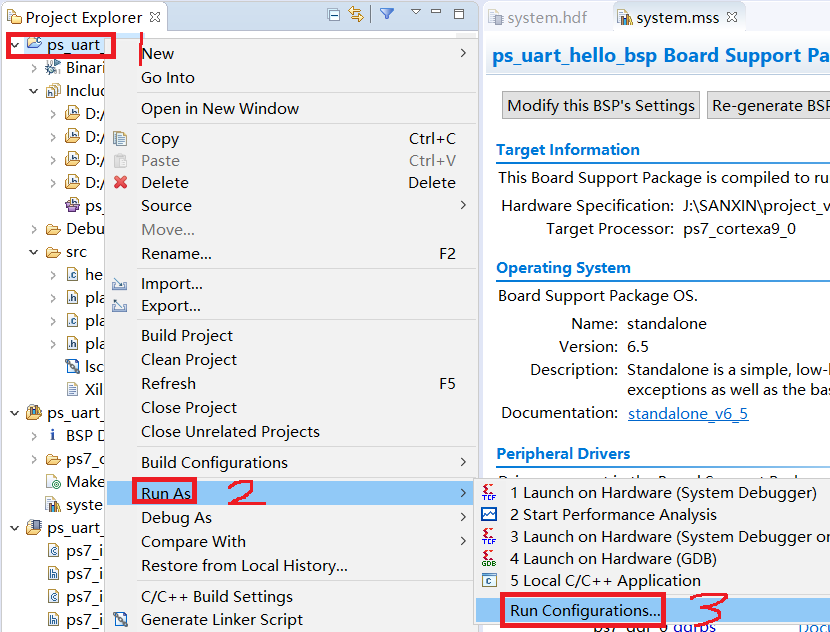
14、為了保證系統的可靠調試,需要添加一個配置,右鍵“Run As -> Run Configuration...”
15、選擇“Reset entire system”復位整個系統,如果系統中還有PL設計,還必須選擇“ProgramFPGA”,再次點擊“Run”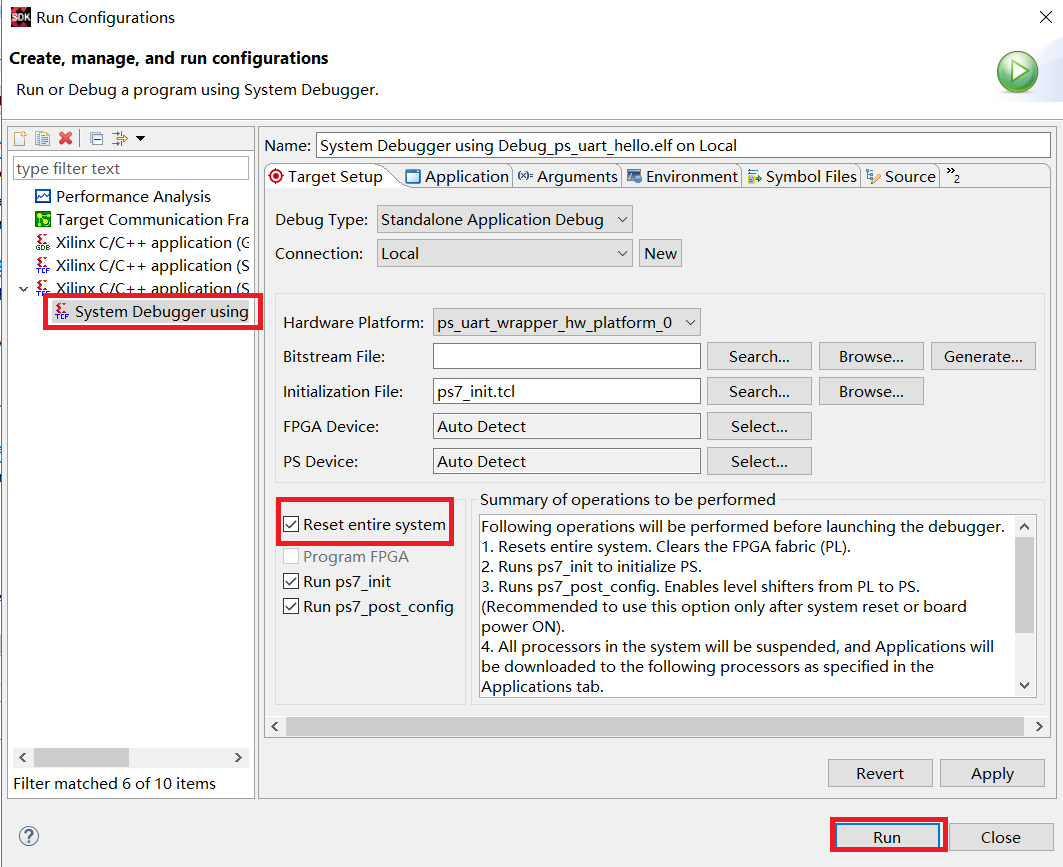
16、點擊“OK”,確認重新運行
17、這次就可以看到熟悉《hello ZYNQ7020,Author:liushuhe 2020.11.26》顯示出來了

三、Debug調試
1、除了“Run As”,還可以“Debug As”,這樣可以設置斷點,單步運行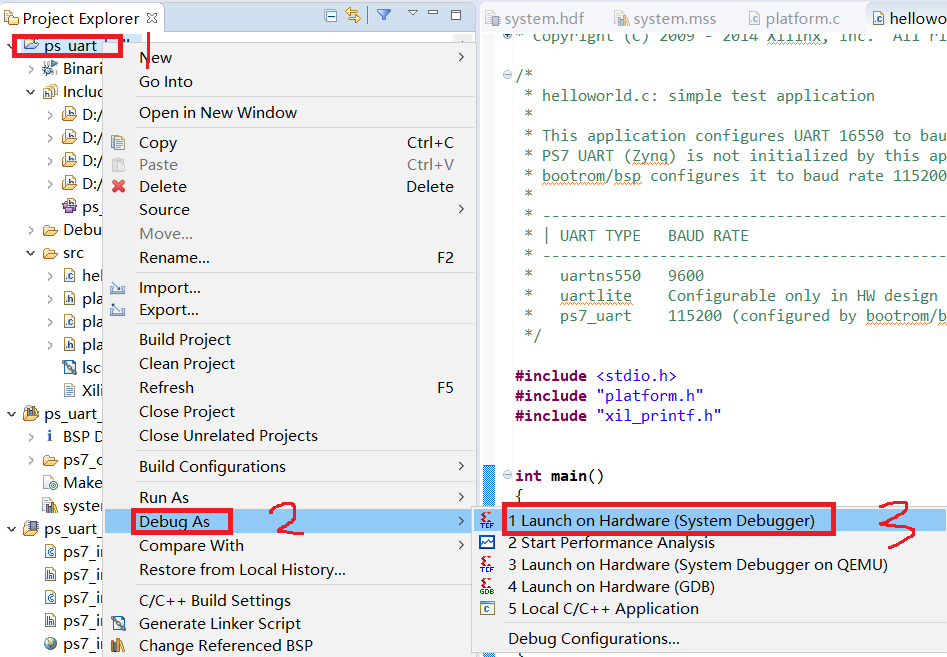
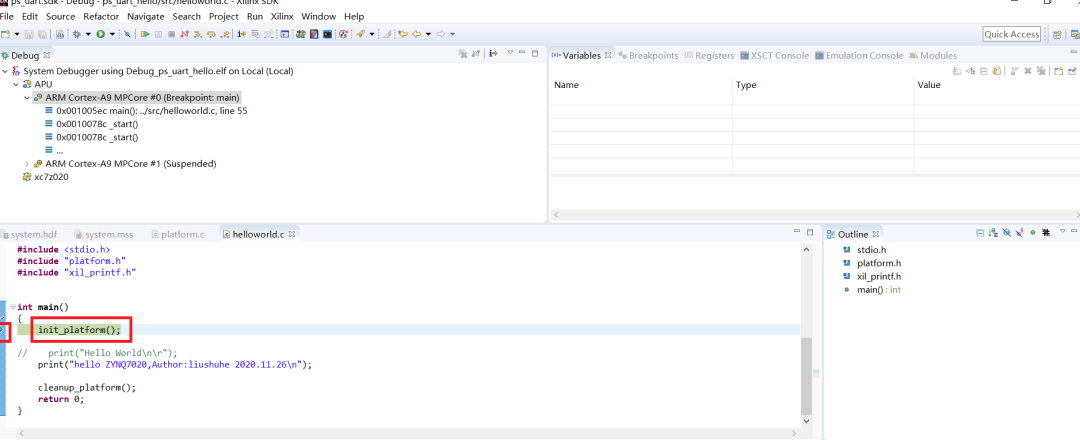
2、進入Debug模式 ,程序會自動運行到main函數處
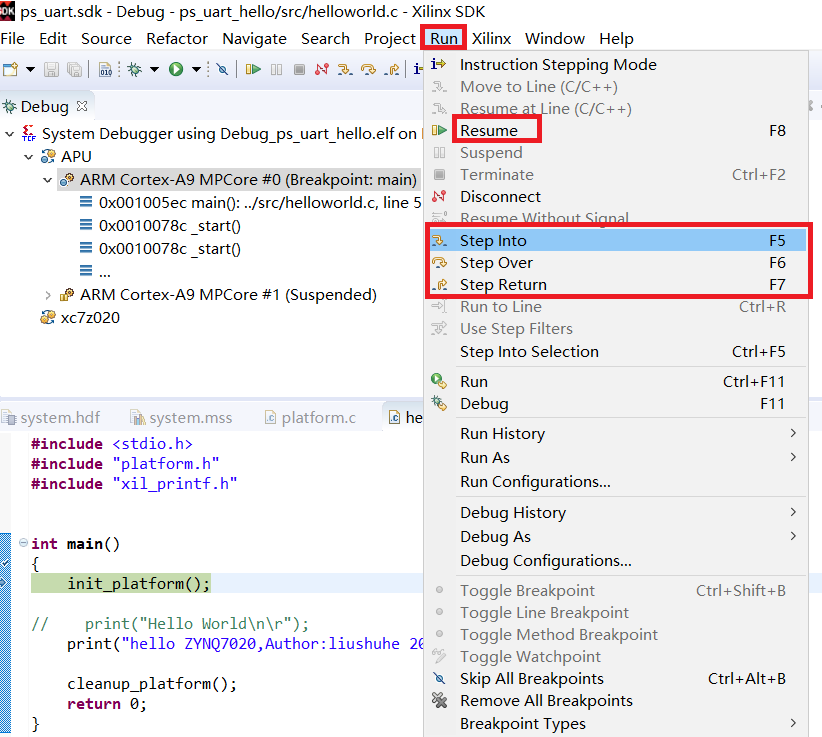
3、和其他開發工具一樣,我們也可以逐步運行、設置斷點
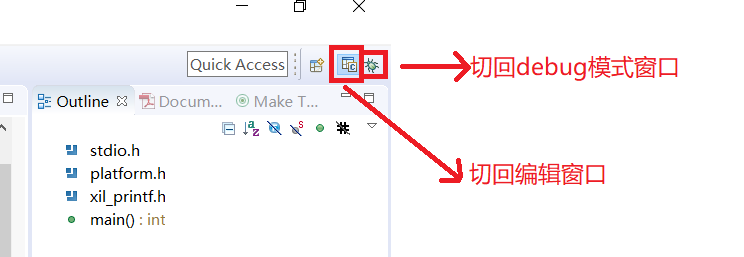
4、窗口右上角,有2個按鈕可以方便我們在debug和編輯模式之間進行切換
四、到此,關于ZYNQ7020 的PS端基本開發流程,全部跑通,關于PS-PL的聯合實驗,待我另寫一篇。
審核編輯:湯梓紅
-
FPGA
+關注
關注
1629文章
21736瀏覽量
603252 -
Xilinx
+關注
關注
71文章
2167瀏覽量
121387 -
C語言
+關注
關注
180文章
7604瀏覽量
136794 -
uart
+關注
關注
22文章
1235瀏覽量
101383 -
串口打印
+關注
關注
0文章
10瀏覽量
3097
原文標題:筆記連載精選 |【xilinx ZYNQ7000系列之《PS端 》串口打印】
文章出處:【微信號:HXSLH1010101010,微信公眾號:FPGA技術江湖】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ZYNQ7000系列 PS、PL、AXI 、啟動流程基本概念
請問FX3的UART口和Xilinx ZYNQ7000的PS端的UART進行硬件連接需要TTL電平轉換嗎?
[XILINX] 正點原子ZYNQ7035/7045/7100開發板發布、ZYNQ 7000系列、雙核ARM、PCIe2.0、SFPX2!
zynq7000 BSP無法在u-boot加載運行,為什么?
zynq7000 BSP無法在u-boot加載運行怎么解決?
dac3174與xilinx zynq7000系列連接,fpga的案例參考代碼有沒有?
分享黑金ZYNQ7000系列視頻教程
Xilinx Zynq-7000特性參數
Xilinx Zynq-7000SOC的相關資料推薦
Zynq7000系列之芯片引腳功能綜述
Zynq-7000 PS端IIC接口使用筆記





 工商網監
工商網監
評論