") PLC、運動控制卡、運動控制器,怎么區(qū)分?如何選用?
PLC、運動控制卡、運動控制器,怎么區(qū)分?如何選用?
前言
最近有不少做PLC開發(fā)的小伙伴,在一些咨詢運動控制卡、運動控制器相關的問題,很多人不清楚它們之間有什么區(qū)別和聯(lián)系,今天跟大家就PLC、運動控制卡、運動控制器區(qū)別及選型做個分享。
背景
隨著工業(yè)技術的發(fā)展,工業(yè)機器人應用越來越廣泛,PLC也不再是簡單的可編程邏輯控制器,各個品牌廠家都推出了自己的運動控制型PLC,來實現(xiàn)一些運動控制功能,與此同時,運動控制卡及運動控制器也在如火如荼地發(fā)展。
對一個電氣工程師來說,如果我們的項目涉及到一些運動相關的控制,我們必然會提前選擇好電機,如果要求精度比較高,一般會選擇伺服電機,否則的話,我們可以選擇步進電機來進行運動控制,但是,無論是步進電機還是伺服電機,一般都是和其對應的驅動器是配套的。那么后續(xù)的問題在于如何通過步進(伺服)驅動器進行步進(伺服)電機的控制呢?
方案
一般來說,我們有以下幾種方案:
1、 采用PLC進行控制,目前市場上的大部分PLC都是支持運動控制的,大部分PLC可以擴展到32軸,根據(jù)驅動器類型可以采用脈沖控制、總線控制或模擬量控制。
2、 采用運動控制卡控制,運動控制卡是專門進行運動控制的一種控制器,可以進行多達256軸的控制,運動控制卡需要PC編程。
3、 采用運動控制器控制,運動控制器與運動控制卡不同之處在于,可以脫離PC電腦的束縛,編寫完程序下載到控制器里,即可直接對驅動器進行控制。
選擇
那么,我們究竟應該如何進行選擇呢?首先我們來看一下他們的區(qū)別與聯(lián)系。
首先,要明確一點,無論是PLC,還是運動控制器、運動控制卡,它們的本質都是一種控制器,主要負責自動化系統(tǒng)中運動軸的控制,同時也支持輸入輸出信號的控制。從區(qū)別來看,主要有以下幾點:
1、 PLC的專長在于邏輯IO控制,實現(xiàn)一些復雜的邏輯控制都很容易。對于運動控制,一般低端的PLC主要是通過高速輸出點來進行脈沖控制,中高端PLC一般會通過總線的方式來進行控制,常用的總線包括Profinet、EtherCAT、CC-Link等。
2、 運動控制卡通過PCI插槽將控制卡插在PC的主機上,也可以通過以太網(wǎng)連接到PC主機上;利用高級編程語言C++、C#、VB、VB.NET、labview等編程語言進行開發(fā);編程中使用運動控制卡廠商提供的控制卡API接口函數(shù),來實現(xiàn)對控制卡資源的使用;運動控制卡也分為脈沖型和總線型,一般總線型要比脈沖型稍貴一些。
3、 PLC具有工作可靠,編程簡單等優(yōu)點,但其運動控制功能相對簡單。PLC的應用過程中主要通過PLC+HMI,這就導致可視化界面受到了一定的限制,因此現(xiàn)在基于PLC的上位機應用也越來越廣泛;
4、 運動控制卡可以利用PC強大的功能,比如CAD功能、機器視覺功能、軟件高級編程等;利用FPGA+DSP / ARM + DSP芯片的功能實現(xiàn)高精度的運動控制(多軸直線、圓弧插補等,運動跟隨,PWM控制等)。
5、 運動控制器和運動控制卡的算法幾乎一樣,它們之間的主要區(qū)別在于運動控制卡需要依賴于PC編程,而運動控制器可以直接寫程序并下載,這樣就可以脫機運行。
6、 隨著機器視覺的廣泛應用,運動控制與機器視覺得到了良好的結合,相比之下,視覺項目采用運動控制卡能夠節(jié)約很大的硬件成本。
總而言之,PLC相對來說更偏向于邏輯控制,而弱化于運動控制,而運動控制卡、運動控制器更偏向于運動控制,而弱化于邏輯控制,同時,運動控制卡和運動控制器對開發(fā)人員的門檻也要相對高一些,因此大家可以根據(jù)自己的實際情況,選擇合適的解決方案。
-
控制器
+關注
關注
112文章
16412瀏覽量
178709 -
plc
+關注
關注
5013文章
13339瀏覽量
464322 -
控制卡
+關注
關注
2文章
60瀏覽量
13022
發(fā)布評論請先 登錄
相關推薦


運動控制看的更清楚細致!RTSys示波器功能簡介 #正運動技術 #運動控制器 #運動控制系統(tǒng) #運動控制卡
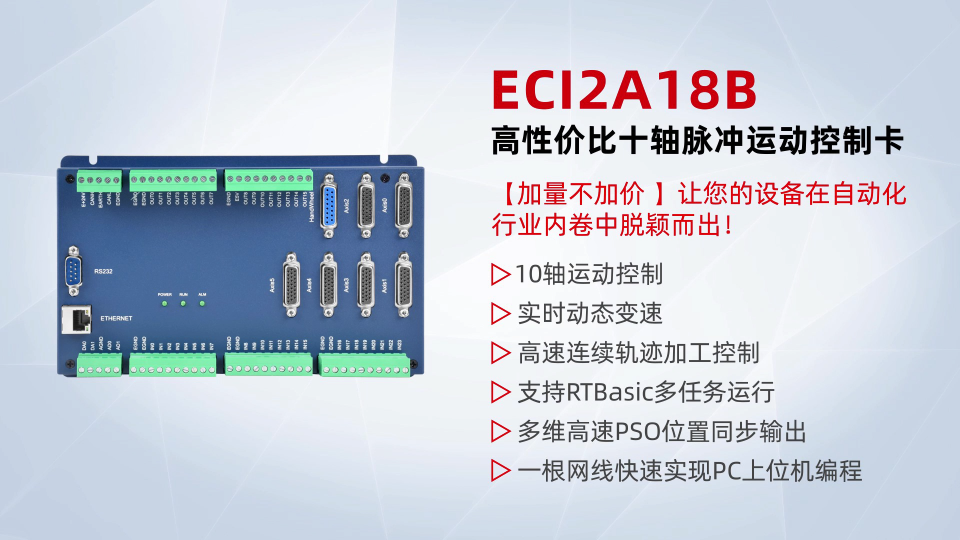
【加量不加價】高性價比十軸脈沖運動控制卡ECI2A18B 讓您的設備在自動化行業(yè)內(nèi)卷中脫穎而出!# 運動控制卡

EtherCAT運動控制器上位機開發(fā)之Python+Qt(三):PDO配置與SDO讀寫# 運動控制器# 控制卡

PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應用
EtherCAT運動控制器與PLC的區(qū)別
運動控制卡伺服電機如何控制
運動控制器與plc編程一樣嗎
plc可以進行運動控制嗎






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論