") 一個用于周視語義占用網(wǎng)格感知的基準(zhǔn)測試
一個用于周視語義占用網(wǎng)格感知的基準(zhǔn)測試
摘要
語義占用網(wǎng)格感知對于自動駕駛至關(guān)重要,因為自動駕駛車輛需要對3D城市場景進(jìn)行細(xì)粒度感知。然而,現(xiàn)有的相關(guān)基準(zhǔn)測試在城市場景的多樣性方面存在不足,并且僅評估前視預(yù)測感知。為了全面評估周視感知算法,我們提出了OpenOccupancy,這是第一個用于周視語義占用網(wǎng)格感知的基準(zhǔn)測試方法。在OpenOccupancy基準(zhǔn)測試中,我們通過添加稠密的語義占用網(wǎng)格標(biāo)注來擴(kuò)展大規(guī)模的nuScenes數(shù)據(jù)集。以前的標(biāo)注依賴于LiDAR點云的疊加,由于LiDAR數(shù)據(jù)的稀疏,導(dǎo)致一些占用標(biāo)簽被遺漏。為了緩解這個問題,我們引入了增強(qiáng)與凈化(AAP)流程,將標(biāo)注密度提高了約2倍,其中涉及約4000個人工小時的標(biāo)注過程。此外為OpenOccupancy基準(zhǔn)測試建立了基于攝像頭、LiDAR和多模態(tài)的基線模型。此外考慮到周視占用感知的復(fù)雜性在于高分辨率3D預(yù)測的計算負(fù)擔(dān),我們提出了級聯(lián)占用網(wǎng)絡(luò)(CONet)來改進(jìn)粗糙預(yù)測,相對于基線模型提高了約30%的性能。我們希望OpenOccupancy基準(zhǔn)測試能促進(jìn)周視占用感知算法的發(fā)展。
主要貢獻(xiàn)
盡管目前對于語義占用網(wǎng)格感知越來越受到關(guān)注,但大多數(shù)相關(guān)基準(zhǔn)都是針對室內(nèi)場景設(shè)計的,SemanticKITTI 將占用感知擴(kuò)展到駕駛場景,但其數(shù)據(jù)集規(guī)模相對較小且多樣性有限,這影響了開發(fā)占用感知算法的泛化和評估。此外,SemanticKITTI只評估前視圖的占用網(wǎng)格結(jié)果,而對于安全駕駛而言,周視感知更為關(guān)鍵。為解決這些問題,我們提出了OpenOccupancy,這是第一個用于周視語義占用感知的基準(zhǔn)。在OpenOccupancy基準(zhǔn)中引入了nuScenes-Occupancy,它將大規(guī)模的nuScenes數(shù)據(jù)集與密集的語義占用標(biāo)注相結(jié)合。
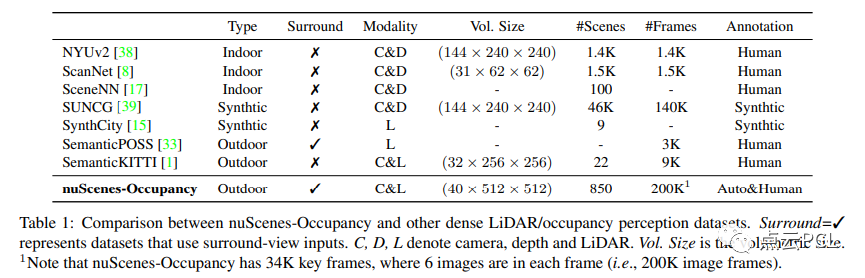
如表1所示,nuScenes-Occupancy標(biāo)注的場景和幀數(shù)比多約40倍和20倍。值得注意的是,通過人工直接標(biāo)注大規(guī)模的占用標(biāo)簽幾乎是不現(xiàn)實的。因此引入了Augmenting And Purifying (AAP)流程,以高效地標(biāo)注和稠密的占用標(biāo)簽。
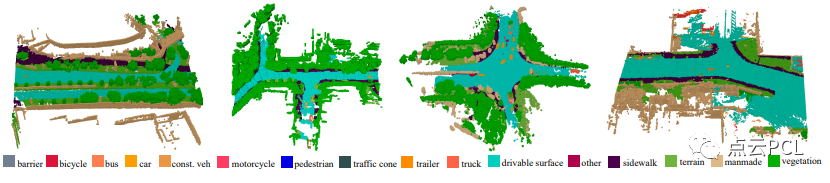
圖1:nuScenes-Occupancy為nuScenes數(shù)據(jù)集中的所有關(guān)鍵幀提供了稠密的語義占用網(wǎng)格標(biāo)簽,在這里展示了標(biāo)注的地面真值,體積大小為(40 × 512 × 512),網(wǎng)格大小為0.2米。
圖1展示了稠密標(biāo)注的可視化效果。為了促進(jìn)未來研究,我們在OpenOccupancy基準(zhǔn)中建立了基于相機(jī)、基于LiDAR和多模式的基線。實驗結(jié)果顯示,基于相機(jī)的方法在小物體(如自行車、行人、摩托車)方面表現(xiàn)更好,而基于LiDAR的方法在大型結(jié)構(gòu)區(qū)域(如行駛表面、人行道)方面表現(xiàn)更優(yōu)。值得注意的是,多模式基線通過自適應(yīng)融合兩種模態(tài)的中間特征,相對提高了基于相機(jī)和基于LiDAR方法的整體性能,分別提升了47%和29%。考慮到周圍占用感知的計算負(fù)擔(dān),所提出的基線只能生成低分辨率的預(yù)測。為了實現(xiàn)高效的占用感知,我們提出了級聯(lián)占用網(wǎng)絡(luò)(CONet),在所提出的基線之上構(gòu)建了一個從粗糙到精細(xì)的流程,相對提高了性能約30%。主要貢獻(xiàn)總結(jié)如下:
提出了OpenOccupancy,這是第一個針對駕駛場景中周圍占用感知的基準(zhǔn)。
通過nuScenes數(shù)據(jù)集引入了AAP流程,它高效地標(biāo)注和稠密化了周圍語義占用標(biāo)簽,結(jié)果形成了第一個用于周圍語義占用分割的數(shù)據(jù)集nuScenes-Occupancy。
我們在OpenOccupancy基準(zhǔn)上建立了基于相機(jī)、基于LiDAR和多模式的基線。此外,我們引入了CONet來減輕高分辨率占用預(yù)測的計算負(fù)擔(dān),相對提高了基線性能約30%。
主要內(nèi)容
周視語義占用網(wǎng)格感知
周視語義占用感知是指生成場景的完整3D表示,包括體積占用和語義標(biāo)簽,與前視圖感知的單目范例不同,周視占用感知算法旨在在周圍視圖的駕駛場景中生成語義占用,具體而言,給定360度的輸入Xi(例如LiDAR掃描或周圍視圖圖像),感知算法需要預(yù)測周圍的占用標(biāo)簽F(Xi) ∈ R D×H×W,其中D、H、W是整個場景的體積大小。值得注意的是,周視圖的輸入范圍比前視覺傳感器覆蓋的范圍大約多了5倍,因此,周視占用網(wǎng)格感知的核心挑戰(zhàn)在于高效構(gòu)建高分辨率的占用表示。
nuScenes-Occupancy
SemanticKITTI 是首個用于室外占據(jù)感知的數(shù)據(jù)集,但在駕駛場景方面缺乏多樣性,并且僅評估前視感知,為了創(chuàng)建一個大規(guī)模的環(huán)境占據(jù)感知數(shù)據(jù)集,我們引入了nuScenes-Occupancy,它在nuScenes數(shù)據(jù)集的基礎(chǔ)上添加了稠密的語義占用標(biāo)注。作者引入了AAP(Augmenting And Purifying)流程來高效地標(biāo)注和密集化占據(jù)標(biāo)簽。
整個AAP流程如算法1所示。
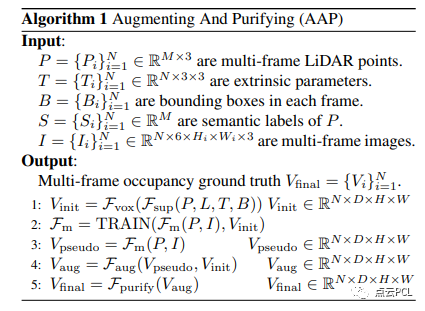
如圖2所示,偽標(biāo)簽對初始標(biāo)注是補(bǔ)充的,而增強(qiáng)和純化標(biāo)簽更密集和精確,值得注意的是增強(qiáng)和純化標(biāo)注中每個幀中約有40萬個占據(jù)體素,比初始標(biāo)注密集了約2倍。總之,nuScenes-Occupancy包含28130個訓(xùn)練幀和6019個驗證幀,在每個幀中對占據(jù)的體素分配了17個語義標(biāo)簽。
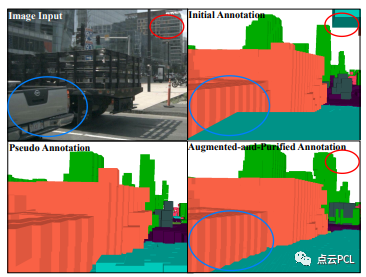
圖2:初始標(biāo)注、偽標(biāo)注和增強(qiáng)純化標(biāo)注之間的對比,紅圈和藍(lán)圈突出顯示增強(qiáng)標(biāo)注更加密集和準(zhǔn)確的區(qū)域。
OpenOccupancy基線
大多數(shù)現(xiàn)有的占據(jù)感知方法都是為前視感知而設(shè)計的,為了將這些方法擴(kuò)展到周圍的占據(jù)感知,需要對每個相機(jī)視角的輸入進(jìn)行單獨處理,這是低效的。此外,兩個相鄰輸出的重疊區(qū)域可能存在不一致性,為了緩解這些問題,我們建立了一致地從360度輸入(例如LiDAR掃描或環(huán)視圖像)中學(xué)習(xí)周圍語義占據(jù)的基線,具體而言,為OpenOccupancy基準(zhǔn)提出了基于相機(jī)的、基于LiDAR的和多模態(tài)的基線,如圖3所示。
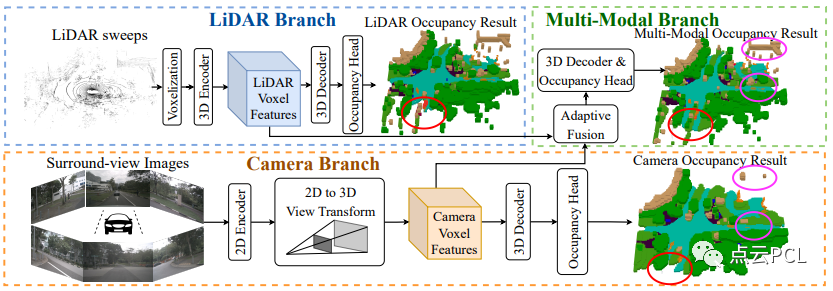
圖3:三種提出的基線的整體架構(gòu),LiDAR分支利用3D編碼器提取體素化的LiDAR特征,相機(jī)分支使用2D編碼器學(xué)習(xí)環(huán)視圖特征,然后將其轉(zhuǎn)換為生成3D相機(jī)體素特征,在多模態(tài)分支中,自適應(yīng)融合模塊動態(tài)地集成兩種模態(tài)的特征。所有三個分支都利用3D解碼器和占據(jù)頭來產(chǎn)生語義占據(jù),在占據(jù)結(jié)果圖中,紅色和紫色圈圈標(biāo)示出多模態(tài)分支可以生成更完整和準(zhǔn)確的預(yù)測。
實驗
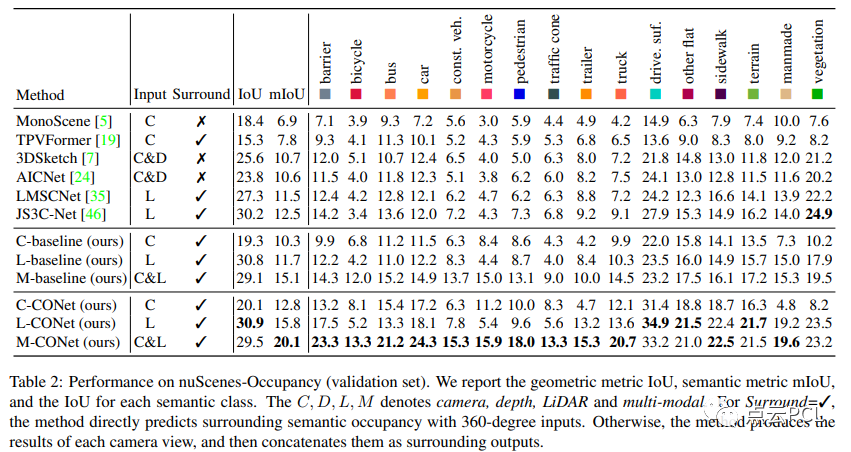
在OpenOccupancy基準(zhǔn)測試中,基于nuScenes-Occupancy評估周圍語義占據(jù)感知性能,對提出的基線、CONet和現(xiàn)代占據(jù)感知算法進(jìn)行全面實驗。所有模型在8個A100 GPU上以8個批次大小進(jìn)行訓(xùn)練,共訓(xùn)練24個時期。利用OpenOccupancy基準(zhǔn)測試,我們分析了六種現(xiàn)代方法(MonoScene ,TPVFormer,3DSketch ,AICNet ,LMSCNet,JS3C-Net )以及提出的基線和CONet的周圍占據(jù)感知性能,從表2的結(jié)果可以看出:
與單視圖方法相比,周圍占據(jù)感知范式表現(xiàn)出更好的性能。
提出的基線對周圍占據(jù)感知具有適應(yīng)性和可擴(kuò)展性。
相機(jī)和LiDAR的信息相互補(bǔ)充,多模態(tài)基線顯著提高了性能。
周視占據(jù)感知的復(fù)雜性在于高分辨率3D預(yù)測的計算負(fù)擔(dān),這可以通過提出的CONet來減輕。
這里提供可視化結(jié)果(見圖5)來驗證CONet可以基于粗糙預(yù)測生成精細(xì)的占據(jù)網(wǎng)格結(jié)果。
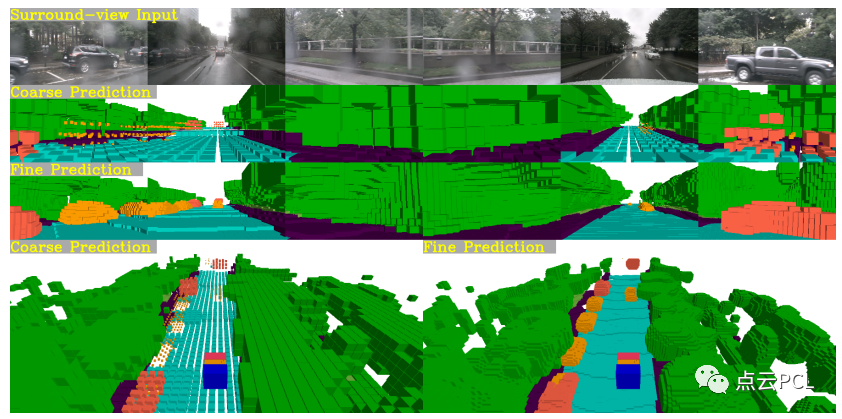
圖5:語義占據(jù)預(yù)測的可視化,第1行是周視圖像。第2行和第3行顯示了由多模態(tài)基線和多模態(tài)CONet生成的相機(jī)視圖的粗糙和精細(xì)占據(jù),第4行比較了它們的全局視圖預(yù)測。
總結(jié)
本文提出了OpenOccupancy,這是首個用于駕駛場景中周視語義占據(jù)感知的基準(zhǔn)測試,具體而言引入了nuScenes-Occupancy,它基于提出的AAP流水線擴(kuò)展了nuScenes數(shù)據(jù)集,帶有稠密的語義占據(jù)標(biāo)注,在OpenOccupancy基準(zhǔn)測試中建立了基于相機(jī)、基于LiDAR和多模態(tài)的基線。此外還提出了CONet來減輕高分辨率占據(jù)預(yù)測的計算負(fù)擔(dān)。在OpenOccupancy基準(zhǔn)測試中進(jìn)行了全面的實驗,結(jié)果顯示基于相機(jī)和基于LiDAR的基線相互補(bǔ)充,而多模態(tài)基線進(jìn)一步提高了性能,分別提高了47%和29%。此外所提出的CONet相對于基線提高了約30%,并且延遲開銷最小。我們希望OpenOccupancy基準(zhǔn)測試對于周視語義占據(jù)感知的發(fā)展有所幫助。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2552文章
51281瀏覽量
755080 -
編碼器
+關(guān)注
關(guān)注
45文章
3653瀏覽量
134856 -
視覺傳感器
+關(guān)注
關(guān)注
3文章
252瀏覽量
22909 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13892瀏覽量
166687 -
LiDAR芯片
+關(guān)注
關(guān)注
1文章
17瀏覽量
3241
原文標(biāo)題:OpenOccupancy:一個用于周視語義占用網(wǎng)格感知的基準(zhǔn)測試
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
集成語義和多Agent 的網(wǎng)格資源發(fā)現(xiàn)模型
基于感知網(wǎng)格的無線傳感器網(wǎng)絡(luò)動態(tài)采樣策略_趙意
基于語義與事務(wù)屬性的QoS感知的服務(wù)優(yōu)化選擇
基于語義的文本語義分析
一文看懂單電壓基準(zhǔn)與雙電壓基準(zhǔn)區(qū)別
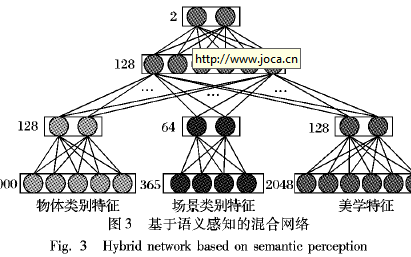
如何使用語義感知來進(jìn)行圖像美學(xué)質(zhì)量評估的方法
MySQL基準(zhǔn)測試和sysbench工具
一個結(jié)合監(jiān)督學(xué)習(xí)的多層感知機(jī)模型
地平線推出業(yè)內(nèi)首個周視感知NOA方案Pilot 3
介紹一個JavaScript數(shù)據(jù)網(wǎng)格組件
語義分割數(shù)據(jù)集:從理論到實踐
自動駕駛中基于網(wǎng)格的交通場景感知介紹

深度學(xué)習(xí)圖像語義分割指標(biāo)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論