 工業自動化質檢中怎樣使用OpenCV進行圖像處理呢?
工業自動化質檢中怎樣使用OpenCV進行圖像處理呢?
機器視覺的圖像識別,就是利用機器人對圖像進行分析、處理,從而實現不同的目標。工業質量問題研究大多數是需要一對一分析,在這里我們只能淺嘗輒止的介紹自動質檢。解決實際問題要具體分析選擇合適的識別方法。
自動化質檢在現代工業自動化生產中可以有效的降低質量檢測的成本,并增加質檢質量和速度,與人類視覺相比,機器視覺優勢明顯。
1)精確度高:機器視覺自動化質檢可顯著提高灰度級,同時可觀測微米級的目標;
2)速度快:機器可以按照指定頻率進行質檢,甚至可達微秒級別;
3)穩定性高:人工質檢質量很大程度上依賴于質檢員的業務水平和個人工作狀態,避免漏檢錯檢。
4)信息存儲:機器視覺檢測的結果無論是產品狀態還是檢測結果描述都可以輕松的自動保存歸檔,為下一步分析工作做好數據準備。
常見的外觀質量問題有:
產品表面缺陷:劃傷、劃痕、輥印、凹坑、粗糙、波紋
非金屬產品表面的夾雜、破損、污點
裝配質量檢測:零件裝配完整性檢測,裝配尺寸精度檢測,位置/角度測量
打印檢測:打印不全、打印歪斜、邊緣不清晰
這些問題歸結起來主要:
判斷目標是否存在計劃外邊緣特征:比如額外的紋理,額外的凹痕。
判斷計劃內的特征匹配,比如Brute-Force,FLANN
大多數特征檢測算法都會涉及圖像的角點、邊和斑點的識別。最常用的特征檢測和提取算法有:
用于檢測角點:Harris, FAST
用于檢測斑點: SIFT(Blob), SURF,BRIEF
ORB:代表帶方向的FAST算法與具有旋轉不變性的BRIEF算法
匹配:Brute-Force,FLANN
工業生產中的視覺定位已應用好多行業,比如半導體封裝,工業制造領域。
一、 半導體封裝領域
在半導體領域中,設備需要根據機器視覺取得的芯片位置信息調取拾取頭,準確拾取芯片進行綁定,這是視覺定位在半導體封裝領域廣泛的應用。
二、機器人工業制造領域
隨著機器人視覺定位技術發展,提升機器人在作業中精準性和穩定性,使企業在生產中效率大大的提高,節省勞動成本,提高市場的競爭力。
提到視覺應用,可能會人會問,那圖像處理和視頻處理的區別:其實視頻處理本質上也是圖像處理,即對視頻中的幀圖進行處理,只不過多了個視頻解碼的過程。另外,視頻處理,除了對幀內圖像進行處理,還可能需要分析幀與幀之間的關系
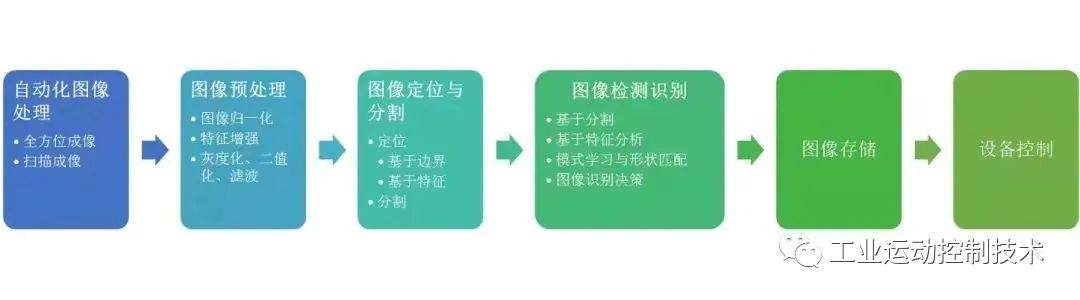
下面我們用一個簡單的demo來幫助讀者理解一般實施步驟:
打開攝像頭,讀取幀
對幀圖像進行預處理(灰度化,濾波,二值化。實際質檢中可能還要圖像矯正,生態學處理以達到更好的處理效果)
對幀圖像進行缺陷識別
對符合要求的圖像進行保存
在實際應用中,一般會根據質檢結果調用工業控制系統進行相應的產品分流,把不合格產品發送到復檢區域,合格產品發送到下一道工序
雖然機器自動質檢有很多優點,但是要全免替代人工目檢,機器視覺還有諸多難點有待攻破。比如由于不同材料物體表面反光、折射等問題都會影響被測物體特征的提取,因此光源亮度角度以及圖像采集的質量直接影響了質檢結果。比如現在玻璃、反光表面的劃痕檢測等,很多時候問題都卡在不同缺陷的集成成像上。
在實際生產中,我們往往是給定程序一些具體的缺陷模式,使用機器視覺來識別它們到底有沒有發生以及和標準對比的質量偏差程度。但有些缺陷并不一定在我們之前經驗中遇到過,進而導致漏檢。如果人工質檢,質檢員一般會意識到新增的缺陷并進行進一步的質檢判斷。當然,這些問題隨著技術的發展都會得到優化解決。
-
圖像處理
+關注
關注
27文章
1292瀏覽量
56745 -
工業
+關注
關注
3文章
1831瀏覽量
46579 -
自動化
+關注
關注
29文章
5578瀏覽量
79281 -
OpenCV
+關注
關注
31文章
635瀏覽量
41350
發布評論請先 登錄
相關推薦
CAN總線在工業自動化中的作用
CAN總線在工業自動化中的應用
工業自動化場景中的智能網關有什么功能





 工商網監
工商網監
評論