 全國產EtherCAT運動控制邊緣控制器(二):統一的上位機API接口
全國產EtherCAT運動控制邊緣控制器(二):統一的上位機API接口
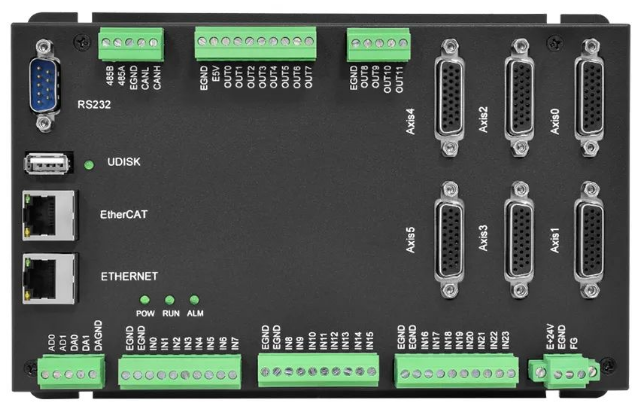
上節課程我們介紹了全國產EtherCAT運動控制邊緣控制器ZMC432H的硬件接口與功能,本節課程我們主要講解一下正運動API函數封裝原理以及自定義API封裝例程。
一、功能簡介
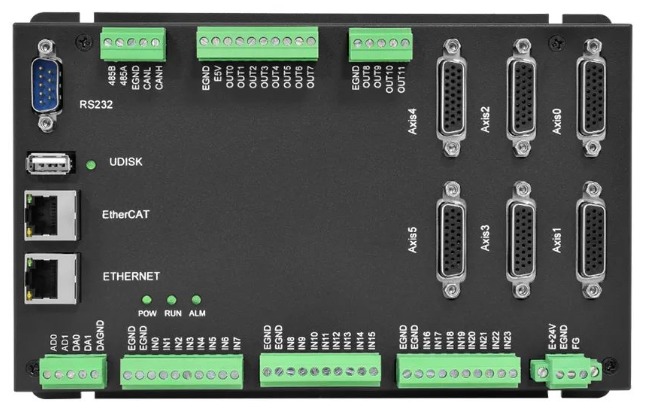
全國產EtherCAT運動控制邊緣控制器ZMC432H是正運動的一款軟硬件全國產自主可控,運動控制接口兼容EtherCAT總線和脈沖型的獨立式運動控制器,最多支持32軸運動控制,同時支持正運動遠程HMI功能,能提供網絡組態顯示,可實時監控和調整參數配置。
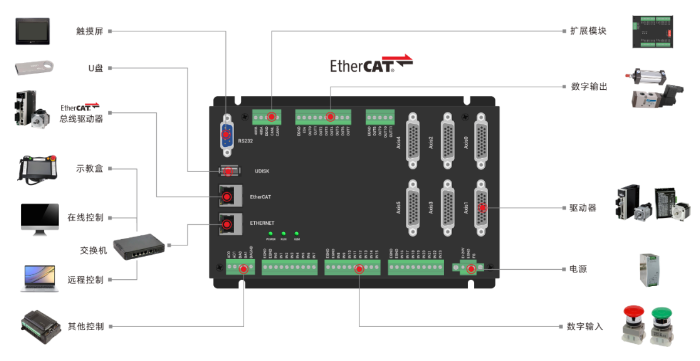
ZMC432H具備豐富的硬件接口和控制功能模塊,能實現高效穩定的運動控制和實時數據采集,以滿足工業控制協同工業互聯網的應用需求。ZMC432H內置了Linux系統,可以使用本地的LOCAL接口進行連接,可以做到更快速的指令交互,單條指令與多條指令一次性交互時間為40us左右。
二、統一的API接口

所有的控制器和控制卡均使用同一套API函數,均支持C、C++、C#、LabVIEW、Python、Delphi等開發語言,支持VC6.0、VB6.0、Qt、.Net等平臺,支持Windows、Linux、WinCE、iMac等操作系統。
各個開發語言都有各自所對應的函數庫,所調用的API均一致,這大大提高了可移植性。各個開發語言庫的調用方式可參考“ZMotion PC函數庫編程手冊 V2.1.1”。
文檔參考路徑:光盤資料4PC函數Zmotion PC函數庫編程手冊及例程源碼。

以下為各個功能部分API指令一覽表;
1、控制器連接
| ZAux_OpenCom | 串口連接控制器 |
| ZAux_SetComDefaultBaud | 串口通訊參數設置 |
| ZAux_OpenEth | 以太網連接控制器 |
| ZAux_OpenPci | PCI卡連接 |
| ZAux_Close | 關閉控制器連接 |
| ZAux_Setlp | 設置控制IP |
| ZAux_SearchEthlist | 搜索當前網段下控制器的IP |
| ZAux_SearchAndOpenCom | 快速與控制器建立連接 |
| ZAux_SearchEth | 快速檢索IP列表 |
| ZAux_GetMaxPciCards | 讀取PCI的控制卡個數 |
| ZAux_FastOpen | 與控制器建立連接,指定連接的等待時間MotionRT7用此方式連接 |
2、控制器信息獲取
| ZAux_GetControllerInfo | 獲取控制器卡信息 |
| ZAux_GetSysSpecification | 獲取控制器最大規格數 |
| ZAux_GetRtcTime | 讀取控制器RTC時間 |
| ZAux_SetRtcTime | 設置控制器RTC時間 |
3、基本軸參數設置
| ZAux_Direct_SetAtype | 設置軸類型 |
| ZAux_Direct_GetAtype | 讀取軸類型 |
| ZAux_Direct_SetUnits | 設置脈沖當量(units) |
| ZAux_Direct_GetUnits | 讀取脈沖當量(units) |
| ZAux_Direct_SetAccel | 設置加速度,單位為units /s/s |
| ZAux_Direct_GetAccel | 讀取加速度,單位為units/s/s |
| ZAux_Direct_SetDecel | 設置減速度,單位為units/s/s |
| ZAux_Direct_GetDecel | 讀取減速度,單位為units/s/s |
| ZAux_Direct_SetSpeed | 設置軸速度,單位為units/s |
| ZAux_Direct_GetSpeed | 讀取軸速度,單位為units/s |
| ZAux_Direct_SetDpos | 設置軸的規劃位置,單位為units |
| ZAux_Direct_GetDpos | 讀取軸的規劃位置,單位為units |
| ZAux_Direct_SetMpos | 設置反饋位置,單位為units |
| ZAux_Direct_GetMpos | 讀取反饋位置,單位為units |
| ZAux_Direct_GetEncoder | 獲取控制器接收的脈沖數 |
| ZAux_Direct_SetFastDec | 設置快速減速度,單位為units/s/s |
| ZAux_Direct_GetFastDec | 讀取快速減速度,單位為units/s/s |
| ZAux_Direct_SetLspeed | 設置軸起始速度,單位為units/s |
| ZAux_Direct_GetLspeed | 讀取軸起始速度,單位為units/s |
| ZAux_Direct_SetSramp | 設置S曲線設置。0-梯形加減速 |
| ZAux_Direct_GetSramp | 讀取S曲線設置。0-梯形加減速 |
| ZAux_Direct_GetMspeed | 讀取反饋速度,單位為units/s |
| ZAux_Direct_GetVpSpeed | 讀取當前軸運行的命令速度,單位為units/s |
| ZAux_Direct_GetIfIdle | 讀取軸是否運動結束 |
| ZAux_Direct_GetAxisStatus | 讀取軸的告警狀態 |
| ZAux_Direct_GetAxisStopReason | 讀取軸歷史異常停止原因 |
4、基本運動控制
| ZAux_Direct_Single_Move | 單軸相對運動 |
| ZAux_Direct_Single_MoveAbs | 單軸絕對運動 |
| ZAux_Direct_Single_Vmove | 單軸連續運動 |
| ZAux_Direct_SetJogSpeed | 設置JOG時速度 |
| ZAux_Direct_GetJogSpeed | 讀取JOG時速度 |
| ZAux_Direct_GetFastJog | 讀取JOG速度輸入IN,有輸入時,速度由SPEED參數給出。如果沒有輸入,速度由JOGSPEED參數給出 |
| ZAux_Direct_SetFastJog | 設置JOG速度輸入IN,有輸入時,速度由SPEED參數給出。如果沒有輸入,速度由JOGSPEED參數給出 |
| ZAux_Direct_SetFwdJog | 設置正向JOG輸入對應的輸入編號-1無效。 |
| ZAux_Direct_GetFwdJog | 讀取正向JOG輸入對應的輸入編號-1無效。 |
| ZAux_Direct_SetRevJog | 設置負向JOG輸入對應的輸入編號-1無效。 |
| ZAux_Direct_GetRevJog | 讀取負向JOG輸入對應的輸入編號-1無效。 |
| ZAux_Direct_SetVrf | 設置VR寄存器 |
| ZAux_Direct_GetVrf | 讀取VR寄存器 |
| ZAux_Direct_GetVrInt | 整型方式讀取VR寄存器 |
6、Table寄存器
| ZAux_Direct_SetTable | 設置系統table寄存器 |
| ZAux_Direct_GetTable | 讀取系統table寄存器 |
7、Modbus寄存器
| ZAux_Modbus_Set0x | 設置modbus位寄存器 |
| ZAux_Modbus_Get0x | 讀取modbus位寄存器 |
| ZAux_Modbus_Set4x | 設置modbus寄存器(REG) |
| ZAux_Modbus_Get4x | 讀取modbus寄存器(REG) |
| ZAux_Modbus_Set4x_Long | Modbus4x寄存器寫操作(LONG) |
| ZAux_Modbus_Get4x_Long | Modbus4x寄存器讀操作(LONG) |
| ZAux_Modbus_Set4x_String | Modbus字寄存器操作(ASCII) |
| ZAux_Modbus_Get4x_String | Modbus字寄存器操作(ASCII) |
| ZAux_Modbus_Set4x_Float | 設置modbus寄存器(float類型) |
| ZAux_Modbus_Get4x_Float | 讀取modbus寄存器(float類型) |
8、Flash/文件讀寫
| ZAux_WriteUFile | 向U盤中寫文件 |
| ZAux_ReadUFile | 從U盤中讀取文件 |
| ZAux_FlashWritef | 寫控制器FLASH空間 |
| ZAux_FlashReadf | 讀控制器FLASH空間 |
更多API接口詳情可以參考“ZMotion PC函數庫編程手冊 V2.1.1”。
三、在線命令的機制
ZAux_Execute或ZAux_DirectCommand可對Basic指令進行封裝。如果使用到沒有封裝的命令或者想封裝自己的函數,可以通過ZAux_Execute發送或ZAux_DirectCommand,或是參照已有代碼修改增加相應的函數。發送字符串命令有兩種方式,緩沖方式和直接方式。具體如圖所示:
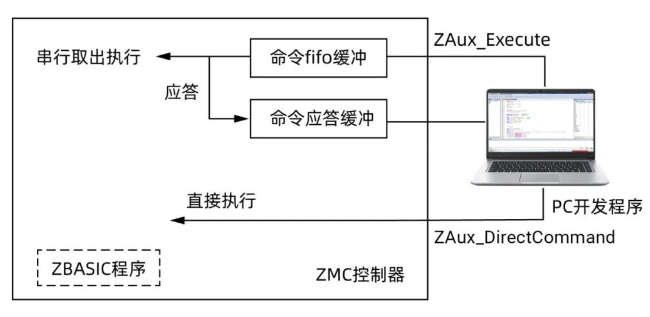
直接方式:直接執行單個變量/數組/參數相關命令,此時所有傳遞的參數必須是具體的數值,不能是表達式;
緩沖方式:可以執行所有命令,并支持表達式作為參數,但是速度慢一些;
以zmcaux.cpp中對已封裝的設置運動速度的函數ZAux_Direct_SetSpeed()與獲取當前編碼器反饋位置的函數ZAux_Direct_GetMpos為例。
程序如下:
#include "zmotion.h" #include "zauxdll2.h" int ZAux_Direct_SetSpeed(ZMC_HANDLE handle, int iaxis, float fValue) { char cmdbuff[2048]; char cmdbuffAck[2048]; if (iaxis> MAX_AXIS_AUX) //MAX_AXIS_AUX為zuaxdll2.h中定義的宏,zuaxdll2.h為正運動庫頭文件 { return ERR_AUX_PARAERR; } sprintf(cmdbuff,"SPEED(%d)=%f",iaxis,fValue);//生成對應命令的字符串 ZAux_DirectCommand(handle,cmdbuff,cmdbuffAck,2048); } int ZAux_Direct_GetMpos(ZMC_HANDLE handle, int iaxis, float fValue) { char cmdbuff[2048]; char cmdbuffAck[2048]; if (iaxis> MAX_AXIS_AUX) { return ERR_AUX_PARAERR; } sprintf(cmdbuff,"MPOS(%d)=%f",iaxis,fValue);//生成對應命令的字符串 ZAux_DirectCommand(handle,cmdbuff,cmdbuffAck,2048); }
四、自定義API封裝介紹及例程
1、自定義API封裝
自定義封裝API的原理實際上是利用了在線命令的機制,上位機生成由各種ZBASIC指令來達到自己想要的功能。
ZAux庫便是直接利用ZBASIC命令通過ZAux_Execute方式或ZAux_DirectCommand方式發送到控制器上,相應函數可以參考ZBASIC手冊對應的命令介紹。
ZAux庫是完全開源庫,源代碼皆可從官網下載,可以在源代碼中添加用戶自定義的函數,用戶也可以新增庫進行封裝。
2、實用封裝例程
(1)直接獲取多種類型數據
用戶若想要獲取多種數據,如軸的命令位置,軸的反饋位置,板卡上的IO點等等,往往都是通過多種單獨獨立的函數獲取不同的數據,這樣堆積,會導致讀寫次數的上位,導致程序的卡頓。為了提升一個上位程序讀取控制器數據的速度,往往可以通過自定義一個函數,快速的把數據傳輸到上位程序上面來,而不是通過多次循環來獲取不同類型的數據。
例:假設有一個簡易的三軸平臺,需要讀取軸0,軸1,軸2的命令位置,反饋位置,以及控制器板卡上的輸入口0,輸入口32,輸出口0,輸出口33,以及三個軸的狀態。
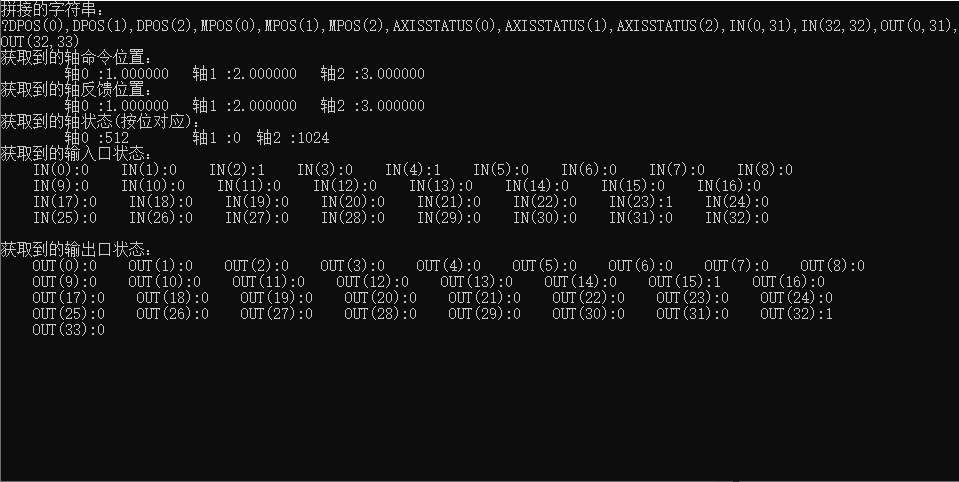
獲取數據程序如下:
// test1.cpp : 定義控制臺應用程序的入口點。 #include "stdafx.h" #include #include "zmotion.h" #include "zauxdll2.h" void commandCheckHandler(const char *command, int ret) { if (ret)//非0則失敗 { printf("%s fail!return code is %dn", command, ret); } } /************************************************************* Description: //我的自定義直接獲取數據函數 Input: //handle 卡鏈接 iaxisNum 軸的總數量 iaxislist 軸號列表 fDposlist 輸出的命令位置值 fMposlist 輸出的反饋位置值 iAxisstatuslist 輸出的軸狀態位置值,按位對應 startIn 要獲取起始的IN編號 endIn 要獲取結束的IN編號 iIn 輸出的IN狀態,按位對應 startOut 要獲取起始的OUT編號 endOut 要獲取結束的OUT編號 iOut 輸出的OUT狀態,按位對應 Output: // Return: //錯誤碼 *************************************************************/ int Demo_Direct_MyGetData(ZMC_HANDLE handle,int iaxisNum, int* iaxislist, float* fDposlist,float* fMposlist,int32* iAxisstatuslist,int startIn , int endIn,int *iIn,int startOut , int endOut,int *iOut) { char cmdbuff[2048]; char tempbuff[2048]; char cmdbuffAck[20480]; //若傳進來的地址為空,則退出 if(NULL == iaxislist || NULL == fDposlist || NULL == fMposlist || NULL == iAxisstatuslist || NULL == iIn || NULL == iOut) { return ERR_AUX_PARAERR; } //若傳進來的結束編號小于起始編碼,則退出 if ((endIn1000) { return ERR_AUX_PARAERR; //參數錯誤,字符串拼接過長 } } //拼接MPOS for (i=0;i1000) { return ERR_AUX_PARAERR; //參數錯誤,字符串拼接過長 } } //拼接AXISSTATUS for (i=0;i1000) { return ERR_AUX_PARAERR; //參數錯誤,字符串拼接過長 } } int32 ostart,istart,iend,oend; //一次最多32個 bool addflag; addflag=false; int32 temp; //一次最多32個 int32 temp2; //一次最多32個 temp=endIn-startIn+1; if (temp%32 == 0) { temp=temp/32; } else { temp=temp/32+1; } //拼接IN for (i=0;iendIn) { iend=endIn; } //生成命令 sprintf(tempbuff, "IN(%d,%d),", istart,iend); strcat(cmdbuff, tempbuff);//字符串拼接 if (strlen(cmdbuff)>1000) { return ERR_AUX_PARAERR ; //參數錯誤,字符串拼接過長 } } temp2=endOut-startOut+1; if (temp2%32 == 0) { temp2=temp2/32; } else { temp2=temp2/32+1; } //拼接OUT for (i=0;iendOut) { oend=endOut; } //生成命令 sprintf(tempbuff, "OUT(%d,%d)", ostart,oend); strcat(cmdbuff, tempbuff);//字符串拼接 if (i1000) { return ERR_AUX_PARAERR; //參數錯誤,字符串拼接過長 } } printf("拼接的字符串:n",cmdbuff); printf("%sn",cmdbuff); ret=ZAux_DirectCommand(handle,cmdbuff,cmdbuffAck,2048); if(ERR_OK != ret) { return ret; } //printf("%sn",cmdbuffAck); //printf("%dn",strlen(cmdbuffAck)); // if(0 == strlen(cmdbuffAck)) { return ERR_NOACK; } float ftempbuff[200]; int itempbuff[200]; ZAux_TransStringtoFloat(cmdbuffAck,iaxisNum*2,ftempbuff);//字符串轉換為浮點數 //DPOS輸出 for(i=0;i0) ) { j++; } //轉換成位 tempval=d_in[j]>>(i-32*j); printf(" IN(%d):%d",i,tempval &(0x01)); if (((i%8)==0)&&(i>0) ) { printf("n"); } } printf("n"); printf("獲取到的輸出口狀態:n"); j=0; for (i=0;i<=33;i++) { if (((i%32)==0)&&(i?>0) ) { j++; } //轉換成位 tempval=d_out[j]>>(i-32*j); printf(" OUT(%d):%d",i,tempval &(0x01)); if (((i%8)==0)&&(i>0) ) { printf("n"); } } printf("n"); Sleep(20000); ret = ZAux_Close(handle); //關閉連接 commandCheckHandler("ZAux_Close", ret) ;//判斷指令是否執行成功 printf("connection closed!n"); handle = NULL; return 0; }
(2)一行命令執行多條不同類型緩沖指令
一般點膠行業、木工行業用的較多的是連續軌跡,連續軌跡之間有插入緩沖輸出,如果把運動和連續軌跡分開發送的話,難免會有局限性,可以通過自己單獨封裝運動函數,來達到一行命令執行多個函數的效果。
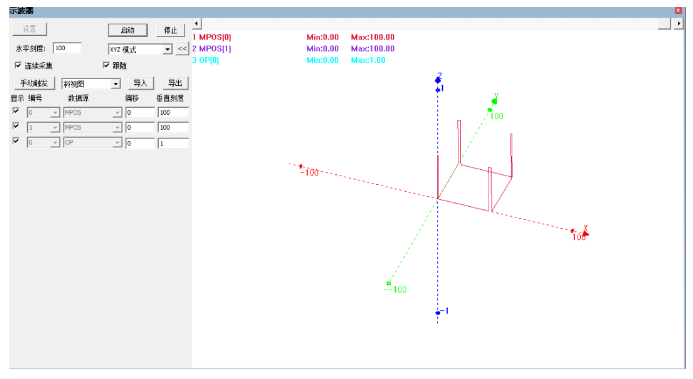
例:假設控制一個XY兩軸平臺,從坐標點(0,0),(100,0)(輸出口0輸出50ms) → (100,100)(輸出口0輸出50ms) → (0,100)(輸出口0輸出50ms) → (0,0)(輸出口0輸出50ms)的軌跡,則可以通過自己封裝,用一條函數,快速發送下去。
一行命令執行多個函數程序如下:
// test1.cpp : 定義控制臺應用程序的入口點。 // #include "stdafx.h" #include #include "zmotion.h" #include "zauxdll2.h" void commandCheckHandler(const char *command, int ret) { if (ret)//非0則失敗 { printf("%s fail!return code is %dn", command, ret); } } /************************************************************* Description: //我的自定義運動函數 Input: //handle 卡鏈接 iMoveLen 填寫的運動長度 iaxisNum 參與運動總軸數 iaxislist 軸號列表 fPoslist 距離列表 iout 緩沖輸出口 outlist 緩沖輸出列表(每條運動,決定是否輸出,0為不輸出,1為在運動后輸出) outtime 緩沖輸出時間 Output: // Return: //錯誤碼 *************************************************************/ int Demo_Direct_MyMoveABS(ZMC_HANDLE handle,int iMoveLen,int iaxisNum, int* iaxislist, float* fPoslist,int iout,int *outlist,int outtime) { char cmdbuff[2048]; char tempbuff[2048]; char cmdbuffAck[20480]; //若傳進來的地址為空,則退出 int ret=0; int i; //先讀取剩余直線緩沖 int iBuffLen = 0; ret = ZAux_Direct_GetRemain_LineBuffer(handle,iaxislist[0],&iBuffLen); if(iBuffLen <= iMoveLen*2) { return 1002; //運動緩沖不夠 } //生成命令 sprintf(cmdbuff, "BASE("); //拼接運動軸列表 for (i=0;i1000) { return ERR_AUX_PARAERR; //參數錯誤,字符串拼接過長 } } sprintf(tempbuff,"%d)n",iaxislist[i]);//生成對應命令的字符串 strcat(cmdbuff,tempbuff); //拼接運動 for (i=0;i1000) { return ERR_AUX_PARAERR; //參數錯誤,字符串拼接過長 } ret=ZAux_DirectCommand(handle,cmdbuff,cmdbuffAck,2048); return ret; } int _tmain(int argc, _TCHAR* argv[]) { char *ip_addr = (char *)"127.0.0.1"; //控制器IP地址 ZMC_HANDLE handle = NULL; //連接句柄 int ret = ZAux_OpenEth(ip_addr, &handle); //連接控制器 if (ERR_SUCCESS != ret) { printf("控制器連接失敗!n"); handle = NULL; Sleep(2000); return -1; } printf("控制器連接成功!n"); ret =ZAux_Direct_SetAtype(handle,0,1);//設置軸0軸類型為1 commandCheckHandler("ZAux_Direct_SetAtype", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetAtype(handle,1,1);//設置軸1軸類型為1 commandCheckHandler("ZAux_Direct_SetAtype", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetUnits(handle,0,100);//設置軸0脈沖當量為100 commandCheckHandler("ZAux_Direct_SetUnits", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetUnits(handle,1,100);//設置軸1脈沖當量為100 commandCheckHandler("ZAux_Direct_SetUnits", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetAccel(handle,0,500);//設置軸0加速度 commandCheckHandler("ZAux_Direct_SetAccel", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetAccel(handle,1,500);//設置軸1加速度 commandCheckHandler("ZAux_Direct_SetAccel", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetDecel(handle,0,500);//設置軸0減速度 commandCheckHandler("ZAux_Direct_SetDecel", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetDecel(handle,1,500);//設置軸1減速度 commandCheckHandler("ZAux_Direct_SetDecel", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetDpos(handle,0,0);//設置軸0 DPOS清0 commandCheckHandler("ZAux_Direct_SetDpos", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetDpos(handle,1,0);//設置軸1 DPOS清0 commandCheckHandler("ZAux_Direct_SetDpos", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetSpeed(handle,0,100);//設置軸0速度 commandCheckHandler("ZAux_Direct_SetDecel", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetSpeed(handle,1,100);//設置軸1速度 commandCheckHandler("ZAux_Direct_SetDecel", ret) ;//判斷指令是否執行成功 ret =ZAux_Direct_SetMerge(handle,0,1);//設置開啟連續插補(開啟主軸的即可,如軸0,軸1插補,軸0為主軸,主軸號取決于連續插補運動指令軸列表的第一個軸號) int axis[2]={0,1}; float POS[12]={0,0,0,100,100,100,100,0,0,0}; int otlist[5]={0,1,1,1,1}; ZAux_Trigger(handle);//觸發示波器 ret = Demo_Direct_MyMoveABS(handle,5,2,axis,POS,0,otlist,50);// commandCheckHandler("Demo_Direct_MyMoveABS", ret) ;//判斷指令是否執行成功 Sleep(20000); ret = ZAux_Close(handle); //關閉連接 commandCheckHandler("ZAux_Close", ret) ;//判斷指令是否執行成功 printf("connection closed!n"); handle = NULL; return 0; }
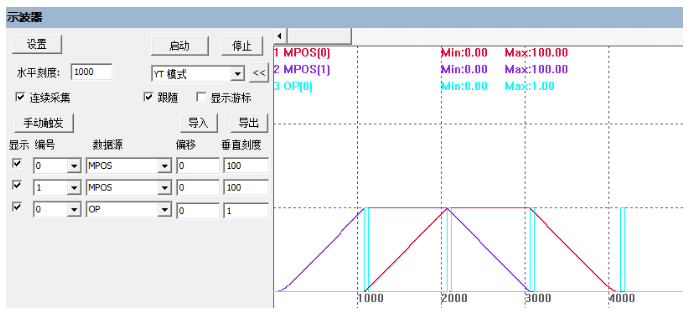
示波器采樣波形如圖所示:
本次,正運動技術全國產EtherCAT運動控制邊緣控制器(二):統一的上位機API接口,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
接口
+關注
關注
33文章
8598瀏覽量
151165 -
運動控制器
+關注
關注
2文章
401瀏覽量
24726 -
API
+關注
關注
2文章
1501瀏覽量
62025 -
運動控制卡
+關注
關注
7文章
113瀏覽量
15463 -
正運動技術
+關注
關注
0文章
101瀏覽量
407
發布評論請先 登錄
相關推薦


正運動技術運動控制器EtherCAT總線快速入門
經濟型EtherCAT運動控制器:EtherCAT總線快速入門
【正運動】全國產EtherCAT運動控制器 | ZMC432H
EtherCAT運動控制器進行自定義API封裝例程




全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發

全國產EtherCAT運動控制邊緣控制器(六):RtBasic文件下載與連續軌跡加工的Python+Qt開發

全國產EtherCAT運動控制邊緣控制器ZMC432H如何使用Python+QT實現連續軌跡加工






 工商網監
工商網監
評論